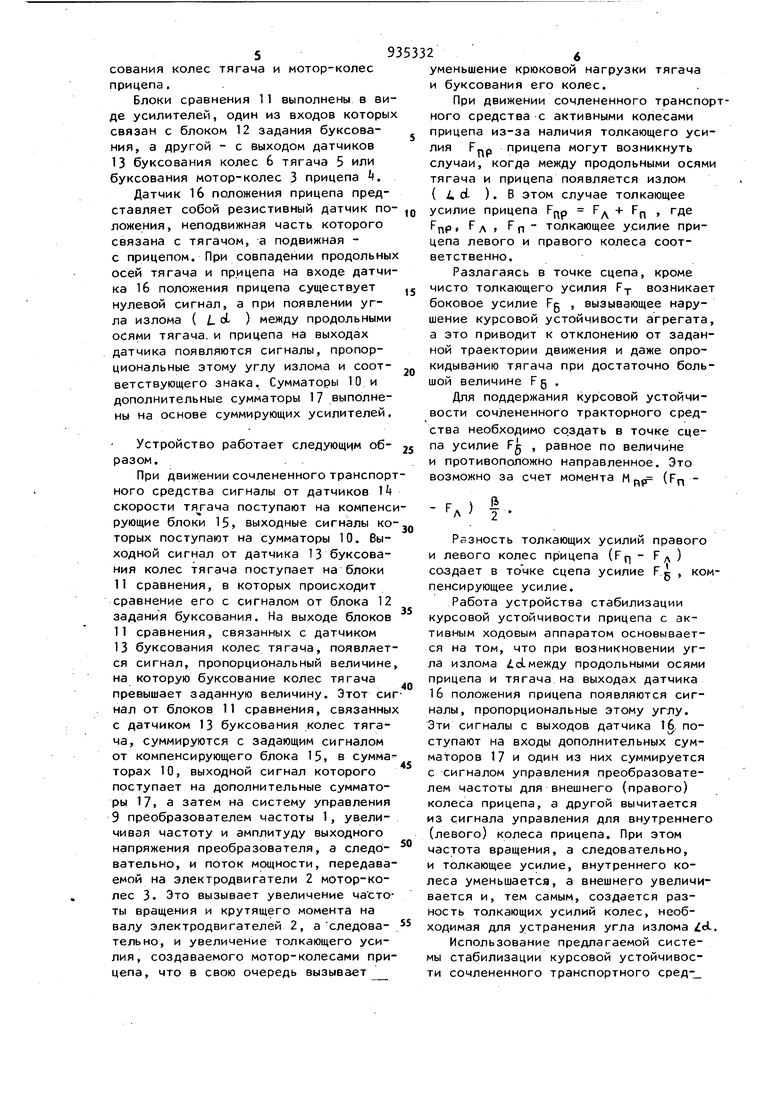
(5) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ТЯГОВЫХ ДЬИГАТЕЛЕЙ ПРИЦЕПА Изобретение относится к транспорт в частности к устройствам для регули рования частоты вращения тяговых дви гателей, сочлененных транспортных средств. По основному авт. св. № 761319 известно устройство для регулирования частоты вращения тяговых двигате лей прицепа, жестко связанного с тягачом, например, агрегатируемой трак тором сельскохозяйственной машины, содержащее индивидуальные преобразователи частоты, соединенные с тяговыми двигателями прицепа, питаемые от силового генератора, приводимого во вращение тепловым двигателем тягача, блоки управления преобразователями, управляющие входы которых связаны соответственно с выходами сумматоров, вычитающий и один из сум мирующих входов каждого из которых соединены через блоки сравнения с датчиками боксования, причем к блокам сравнения подключен блок западания боксования, а другие суммирующие входы сумматоров соединены с датчиками частоты вращения- ведущих колес тягача tl. Недостатком данного устройства является то, что оно не позволяет осуществлять взаимосвязанное межбортовое регулирование частоты вращения колес прицепа и тем самым не обеспечивает поддержания курсовой устойчивости сочлененного транспортного средства. Цель изобретения -.повышение точности регулирования путем осуществления курсовой коррекции. Поставленная цель достигается тем, что устройство снабжено дополнительными сумматорами, включенными между выходами сумматоров и входами блоков управления преобразователей, и датчиком положения прицепа, подключенным к другим входам дополнительных сумматоров. На фиг, 1 представлена блок-схема предложенного устройства; на фиг. 2схема взаимного расположения тягама и прицепа при нарушении курсовойус тойчивости, а также силы, возникающи при этом. Устройство (по фиг. 1) состоит из преобразователей 1 частоты, соединен ных с тяговыми двигателями 2, приводящими во вращение ведущие колеса 3 прицепа 4. Прицеп А, например сельскохозяйственная машина, связан с тя гачом 5, например трактором, имеющим ведущие колеса 6, приводимые во вращение тепловым двигателем 7, к которому присоединен силовой генератор 8 Преобразователи частоты соединены с блоками 9 управления, управляющие входы которых связаны с выходами сум маторов 10 соответственно. Суммирующий и вычитающий входы каждого из сумматоров 10 соединены с блоками 11 сравнения. К одному из входов каждого блока 11 сравнения подключен блок 12 задания буксования, а к другим входам - датчики 13 буксования. На ведущих колесах 6 тягача 5 установле ны датчики 14 частоты вращения, кото рые присоединены ко вторым суммирующим входам сумматоров 10. В случае разного диаметра ведущих колес 6 тягача 5 и ведущих колес 3 прицепа k это соединение осуществляется) через компенсирующиеблоки 15. Датчик 16 положения прицепа соединен с одними из входов дополнительных сумматоров 17, соединенными другими входами с выходами сумматоров 10, а выходами с управляющими входами блоков 9 упра ления. Силовой генератор 8 приводится от теплового двигателя 7. тягача 5 через повышающий редуктор 18 и оборудован системой возбуждения 19. Силовой электрический генератор 8 представляет собой синхронный электрический генератор повышенной частоты, -приводимый во вращение дизелем 7 трактора 5 через повышающий редуктор 18 и служащий для получения трехфазного напряжения постоянной амплитуды и частоты. Система возбуждения 19 ге нератора 8 выполнена в виде управляемого выпрямителя и служит для поддержания напряжения генератора 4 на номинальном уровне или регулирования его по определенному закону. Вентильная часть преобразователей частоты 1 с непосредственной связью представляет собой три группы (rio количеству выходных фаз) встречнопараллельно, включенных тиристоров. циклическое переключение которых позволяет преобразовать напряжение генератора 8 постоянной частоты и амплитуды в напряжение регулируемой частоты и амплитуды, которое поступает на электрические двигатели 2 мотор-колес 3. Система управления 9 преобразователей частоты 1 включает устройство управления режимом работы электродвигателя, определяющее частоту и амплитуду напряжения на выходе преобразователя, фазосмещающего устройства, устройство формирования напряжения управления, выход которого подключен к выходу фазосмещающего устройства и усилители импульсов, подаваемых на управляющие переходы силовых тиристоров. Мотор-колеса 3 выполнены в виде отдельного агрегата, включающего электродвигатель 2, редуктор и собственно колесо, и могут, использоваться на различных по назначению и конструкции сельскохозяйственных машинах для активизации их ходового аппарата. Датчики 14 скорости представляют собой тахогенераторы, связанные с ведущими колесами 6 трактора 5, выходное напрях ение которых пропорционально теоретической (без учета буксования) скорости движения трактора. Компенсирующие блоки 15 выполнены в виде усилителей с регулируемым коэффициентом усиления для компенсации разности диаметров колес трактора и мотор-колес сельскохозяйственной машины. Датчики 13 буксования ведущих колес 6 тягача 5 иведущих колес 3 прицепа k выполнены на принципе доплеровского смещения частот ультразвуковых волн и содержат (не показано) один общий излучатель-приемник энергии ультразвуковой частоты, направленный на опорную поверхность, и по два излучателя приемника, направленные соответственно на ведущие колеса 6 тягача 5 и ведущие колеса 3 прицепа 4, Выходы излучателей приемников соединены с в одами электронного устройства обработки сигналов, выходы которого являются выходами датчиков 13 буксования. Блок 12 задания буксования может быть выполнен в виде потенциометра, выходное напряжение которого пропорционально величине максимального буксования колес тягача и мотор-колес прицепа, Блоки сравнения 11 выполнены в виде усилителей, один из входов которых связан с блоком 12 задания буксования, а другой - с выходом датчиков 13 буксования колес 6 тягача 5 или буксования мотор-колес 3 прицепа /f. Датчик 16 положения прицепа представляет собой резистивный датчик положения, неподвижная часть которого связана с тягачом, а подвижная с прицепом. При совпадении продольных осей тягача и прицепа на входе датчика 16 положения прицепа существует нулевой сигнал, а при появлении угла излома { L oL ) между продольными осями тягача, и прицепа на выходах датчика появляются сигналы, пропорциональные этому углу излома и соответствующего знака. Сумматоры 10 и дополнительные сумматоры 17.выполнены на основе суммирующих усилителей. Устройство работает следующим образом.. . При движении сочлененного транспорт ного средства сигналы от датчиков 1 скорости поступают на компенс рующие блоки 15, выходные сигналы ко торых поступают на сумматоры 10. Выходной сигнал от датчика 13 буксования колес тягача поступает на блоки 11 сравнения, в которых происходит сравнение его с сигналом от блока 12 задания буксования. На выходе блоков 11 сравнения, связанных с датчиком 13 буксования колес тягача, появляется сигнал, пропорциональный величине на которую буксование колес тягача превышает заданную величину. Этот сиг нал от блоков 11 сравнения, связанных с датчиком 13 буксования колес тягача, суммируются с задающим сигналом от компенсирующего блока 15, в сумматорах 10, выходной сигнал которого поступает на дополнительные сумматоры 17, а затем на систему управления 9 преобразователем частоты 1, увеличивая частоту и амплитуду выходного напряжения преобразователя, а следовательно, и поток мощности, передаваемой на электродвигатели 2 мотор-колес 3. Это вызывает увеличение частоты вращения и крутящего момента на валу электродвигателей 2, аследовательно, и увеличение толкающего усилия, создаваемого мотор-колесами прицепа, что в свою очередь вызывает 93 25 уменьшение крюковой нагрузки тягача и буксования его колес. При движении сочлененного транспортного средства с активными колесами прицепа из-за наличия толкающего усилия F..p прицепа могут возникнуть случаи, когда между продольными осями тягача и прицепа появляется излом { d ). В этом случае толкающее f Aусилие прицепа F, л ft толкающее усилие прицепа левого и правого колеса соответственно. Разлагаясь в точке сцепа, кроме чисто толкающего усилия F-p возникает боковое усилие Fg , вызывающее нарушение курсовой устойчивости агрегата, а это приводит к отклонению от заданной траектории движения и даже опрокидыванию тягача при достаточно большой величине F5 . Для поддержания курсовой устойчивости сочлененного тракторного средства необходимо со.здать в точке сцепа усилие Fg , равное по величине и противоположно направленное. Это возможно за счет момента М р,а (Fp ) - 2 Разность толкающих усилий правого и левого колес прицепа (Fq - F ) создает в точке сцепа усилие F.i , компенсирующее усилие. Работа устройства стабилизации курсовой устойчивости прицепа с активным ходовым аппаратом основывается на том, что при возникновении yi- ла излома /.oLмежду продольными осями прицепа и тягача на выходах датчика 16 положения прицепа появляются си1- налы, пропорциональные этому углу. Эти сигналы с выходов датчика 16. поступают на входы дополнительных сумматоров 17 и один из них суммируется с сигналом управления преобразователем частоты для внешнего (правого) колеса прицепа, а другой вычитается из сигнала управления для внутреннего (левого) колеса прицепа. При этом частота вращения, а следовательно, и толкающее усилие, внутреннего колеса уменьшаетоа, а внешнего увеличивается и, тем самым, создается разность толкающих усилий колес, необходимая для устранения угла излома oL. Использование предлагаемой системы стабилизации курсовой устойчивости сочлененного транспортного сред- ства с активными колесами прицепа позволяет улучшить управляемость агрегата, облегчить работу водителя и повысить агротехнические показатели работы агрегата за счет более точного выполнения агротехнических требований (прямолинейности движения агрегата, параллельности рядков растений и т.д.). Формула изобретения Устройство для регулирования частоты вращения тяговых двигателей при-15 9 8 цепа по авт. св. № 761319, отличающееся тем, что, с целью повышения точности регулирования путем осуществления курсовой коррекции, оноснабжено дополнительными сумматорами , включенными между выходами сумматоров и входами блоков управления преобразователей, и датчиком положения прицепа, подключенным к другим входам дополнительных сумматоров. Источники информации, принятые во внимание при экспертизе Авторское свидетельство СССР 761319, кл. В 60 L 15/32, 22.05.79.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения тяговых двигателей прицепа транспортного средства | 1981 |
|
SU1004169A2 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ СЦЕПНОЕ УСТРОЙСТВО ПРИЦЕПА | 2015 |
|
RU2613140C2 |
| Транспортное средство | 1990 |
|
SU1750992A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ МОБИЛЬНОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090027C1 |
| МНОГООСНОЕ ЭЛЕКТРИЧЕСКОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ГИДРОПНЕВМАТИЧЕСКОЙ СИСТЕМОЙ НАКОПЛЕНИЯ ЭНЕРГИИ | 1996 |
|
RU2102260C1 |
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО ПЛАВАЮЩЕГО ТИПА | 2015 |
|
RU2584643C1 |
| ТРАНСМИССИЯ СОЧЛЕНЁННОГО НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2524205C1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
15 10
/Vt
Ff
