Изобретение относится к измерительной технике и может быть использовано для измерения и контроля расстояний, зазоров, биений, вибраций электропроводных объектов без механического контакта с ними как в составе контрольно-измерительной аппаратуры, так и самостоятельно. В частности, может быть использовано для измерения торцовых биений вращающихся дисков.
Известен емкостный измерительный преобразователь, содержащий измерительную схему с заземленной пластиной, измерительные электроды,
Однако этот преобразователь неудобен в эксплуатации ввиду необходимости использования при измерениях двух измерительных электродов, емкости которых относительно контролируемой пластины должны изменяться встречно, т.е. при увеличении одной другая должна уменьшаться
и наоборот, что делает невозможным измерение расстояний до объекта, доступ к которому имеется только с одной стороны Кроме того, на результаты измерений влияют механические помехи места крепления корпуса преобразователя, которые изменяя емкости измерительных электродов, накладываются на полезный сигнал, несущий информацию о расстоянии до контролируемой поверхности
Известен также емкостный измерительный преобразователь для определения расстояния до контролируемой электропроводной поверхности содержащий электропроводный корпус, закрепленный в стенке корпуса с обеспечением электрической изоляции от чего измерительный электрод, установленный с зазором относительно него эталонный электрод и присоединенный между измерительным
VI
о
00
ч
4 hO
электродом и корпусом измерительный блок. В условиях воздействия механических помех типа вибраций вточке крепления корпуса преобразователя, происходят паразитные изменения емкости измерительного электрода по закону помехи, которые накладываются на полезный сигнал, при этом емкость эталонного электрода остается неизменной. Воздействие механических помех повышает нижний предел измерения и не позволяет получить абсолютную погрешность измерения ниже, чем амплитуда помех, что приводит к низкой точности измерений в условиях воздействия механических помех,
Целью настоящего изобретения является повышение точности измерения зазоров, вибраций, биений, перемещений путем компенсации влияния вибраций и других механических воздействий, действующих в месте крепления преобразователя к внешнему держателю.
Поставленная цель достигается тем. что емкостной измерительный преобразователь для контроля расстояния до электропроводной поверхности, содержащий электропроводный корпус, закрепленный в стенке корпуса с обеспечением электрической изоляции от него измерительный электрод, установленный с зазором относительно него эталонный электрод и присое- диненный между измерительным электродом и корпусом измерительный блок, снабжен упругим подвесом, на котором установлен эталонный электрод, а последний электрически связан с корпусом.
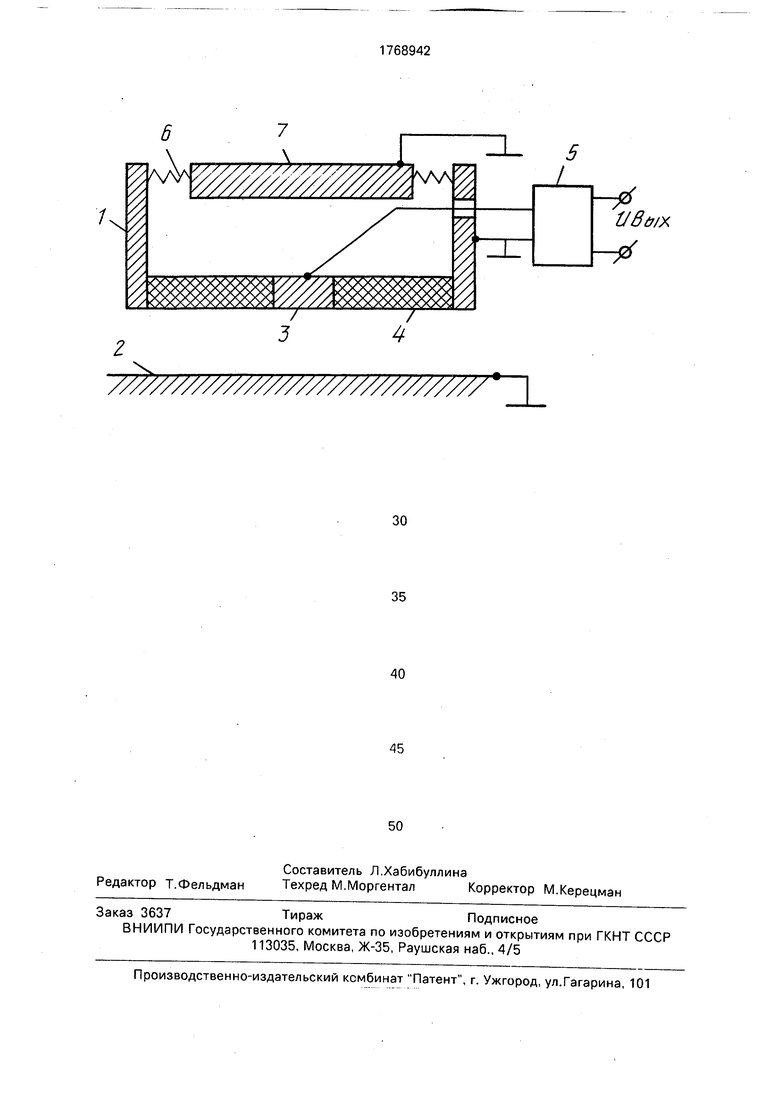
На чертеже изображена принципиальная схема емкостного измерительного преобразователя для контроля расстояния дс электропроводной поверхности.
Емкостный измерительный преобразователь содержит корпус 1, установленный с возможностью электрической связи в процессе контроля с электропроводной поверхностью 2, жестко закрепленный в стенке корпуса измерительный электрод 3, установленный на диэлектрической прокладке 4 и подключенный к измерительному блоку 5. Корпус 1 оснащен упругим подвесом 6, на котором вблизи измерительного электрода 3 установлен эталонный электрод 7, электрически подсоединенный к корпусу 1. Эталонный электрод 7 расположен над измерительным электродом 3 с зазором, равным номинальному расстоянию от измерительного электрода 3 до контролируемой электропроводной поверхности 2. В качестве упругого подвеса 6 могут применяться, например, резиновые диафрагмы, плоские, спиральные и цилиндрические пружины.
В отсутствии воздействия возмущающих механических колебаний емкость изме- рительного электрода 3 относительно
эталонного электрода 7 является постоянной, и выходной сигнал измерительного блока 5 пропорционален величине емкости измерительного электрода 3 относительно контролируемой электропроводной поверхносги 2 и, соответственно, величине расстояния между ними. При этом между измерительным электродом 3 и эталонным электродом 7 образуется дополнительная электрическая емкость, равная измерительной емкости и подключенная к ней параллельно. Равенство емкостей обеспечивает постоянство суммы емкостей измерительного электрода 3 относительно контролируемой электропроводной поверхности 2 и
относительно эталонного электрода 7 при перемещении измерительного электрода 3 под воздействием механических помех.
Пр-i воздействии возмущающих механических колебаний на емкостной измерительный преобразователь, например, закрепленный на внешнем держателе корпусом 1. в направлении нормальном к контролируемой электропроводной поверхности 2, происходит передача возмущающих
механических колебаний через корпус 1 на измерительный электрод 3. Механическая связь корпуса 1 и эталонного электрода 7 через упругий подвес 6 обеспечивает пере дачу возмущающих механических колебаний эталонному электроду 7. который имеет степень подвижности относительно измерительного электрода 3 При воздействии возмущающих механических колебаний на корпус 1, например, а месте крепления его
к внешнему держателю, в направлении нормальном к контролируемой электропроводной поверхности 2, корпус 1 будет совершать вынужденные колебания в том же направлении.
Собственная частота механического резонанса эталонного электрода 7, установленного на упругом подвесе 6, задается в соответствии с соотношением:
W0 0,5 х W,(1)
(де W0 - частота собственного механического резонанса эталонного электрода 7, установленного на упругом подвесе 6;
W - круговая частота механических колебаиий, возмущающих корпус 1 преобразователя.
При воздействии механических колебаний с широким спектром в качестве W может быть принята частоте., наиболее влияющая на точность измерений.
При выполнении соотношения (1), при воздействии механических возмущающих колебаний на корпус 1 преобразователя он вместе с измерительным электродом 3 будет совершать вынужденные колебания в том же направлении, что и помеха, а эталонный электрод 7 будет колебаться в противо- фазе относительно измерительного электрода 3. При этом зазоры между измерительным электродом 3 и эталонным электродом 7, а также между измерительным электродом 3 и контролируемой электропроводной поверхностью 2 будут синхронно изменяться в противоположных направлениях пропорционально амплитуде возмущающих механических колебаний. При увеличении зазора между измерительным электродом 3 и эталонным электродом 7 будет уменьшаться зазор между измерительным электродом 3 и контролируемой электропроводной поверхностью 2 и наоборот. При этом сумма емкостей остается не- изменной. Измерительный блок 5 формирует сигнал, пропорциональный сумме емкостей измерительного электрода 3 относительно электрода 7 и измерительного электрода 3 относительно контролируемой электропроводной поверхности 2.
При размещении эталонного электрода 7, электрически соединенного с контролируемой электропроводной поверхностью 2, над измерительным электродом 3 с зазором, равным номинальному расстоянию измерительного электрода 3 до контролируемой электропроводной поверхности 2, образуется дополнительная электрическая емкость, равная измерительной емкости и подключенная к ней параллельно. Выходное напряжение емкостного измерительного преобразователя Увых в отсутствии механических помех определяется выражением:
UBb.x Kx(Ci t-C2). (2)
где Ci - емкость измерительного электрода 3 относительно эталонного электрода 7;
С2 емкость измерительного электрода 3 относительно контролируемой электропроводной поверхности 2:
К- постоянный коэффициент.
Допустим, что от воздействия механических колебаний на емкостной измерительный преобразователь, например, закрепленный на внешнем держателе корпусом 1, в направлении, нормальном к контролируемой электропроводной поверхности 2 с круговой частотой, превышающей частоту собственного механического резонанса эталонного электрода 7, установленного на упругом подвесе 6, например, более чем в два раза, емкость С, увеличилась на
С, при этом емкость Ci уменьшается на ту же величину, так как в этом случае емкости изменяются в противофазе.
Передача возмущающих механических
колебаний происходит через корпус 1 измерительному электроду 3, который вместе с корпусом 1 совершает вынужденные колебания в том же направлении и с той же амплитудой, что и помеха, и через упругий
подвес 6 - эталонному электроду 7, имеющему степень подвижности относительно измерительного электрода 3, который движется в противофазе относительно измерительного электрода 3. Зазоры между
измерительным электродом 3 и контролируемой электропроводной поверхностью 2, а также между измерительным электродом 3 и эталонным электродом 7 будут синхронно изменяться в противоположных направлениях пропорционально амплитуде возмущающих механических колебаний, при этом емкость Ci также изменяется в противофазе с емкостью С2. Выходное напряжение, при воздействии механических колебаний
1)вых, будет иметь вид:
UBb,x Kx(Ci-dC + C2 + dC)(3)
Из выражений (2) и (3) следует, что UEMX Овых. т.е. остается равным тому, которое было в отсутствии механических помех.
При уменьшении С2 на d С выходное напряжение также остается неизменным. Таким образом, механическая помеха не влияет на выходное напряжение, следовательно, и на информацию об измеряемой физической величине (измеряемом расстоянии до контролируемой поверхности).
Следовательно, выходной измерительный сигнал окажется нечувствительным к возмущающим корпус емкостного измерительного преобразователя механическим помехам.
Формула изобретения
Емкостной измерительный преобразо- ватель для контроля расстояния до электро- проводной поверхности, содержащий электропроводный корпус, закрепленный в стенке корпуса с обеспечением электрической изоляции от него измеритель- ный электрод, установленный с зазором относительно него эталонный электрод и присоединенный между измерительным электродом и корпусом измерительный блок, отличающийся тем, что, с целью повышения точности путем компенсации влияния вибраций, он снабжен упругим подвесом, на котором установлен эталонный электрод, а последний электрически связан с корпусом.
7 Ь
7Л
7Л
L
5
h Ивы
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| АКСЕЛЕРОМЕТР | 2012 |
|
RU2514150C1 |
| АКСЕЛЕРОМЕТР | 1998 |
|
RU2148831C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ЕМКОСТНОГО АКСЕЛЕРОМЕТРА | 1996 |
|
RU2098832C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ДАТЧИК ДЛЯ КОНТРОЛЯ ПЕРЕМЕЩАЕМОГО ТОНКОГО ОБЪЕКТА | 2020 |
|
RU2723971C1 |
| АКСЕЛЕРОМЕТР | 1999 |
|
RU2148830C1 |
| Устройство для измерения технических характеристик механоэлектрических преобразователей с емкостным выходом и способ измерения коэффициента преобразования по заряду (варианты) | 2023 |
|
RU2797751C1 |
| Гиростабилизированный гравиметр | 1976 |
|
SU742850A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2545469C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2014 |
|
RU2561006C1 |
Изобретение относится к измерительной технике и имеет целью повышение точности емкостного измерительного преобразователя для контроля расстояния до электропроводной поверхности за счет компенсации влияния вибраций на показания преобразователя. Преобразователь содержит электропроводный корпус, в котором на диэлектрической прокладке закреплен измерительный электрод, размещаемый в процессе измерений параллельно контролируемой электропроводной поверхности В корпусе, на упругом подвесе установлен эталонный электрод. При вибрации корпуса относительно поверхности суммарная емкость между измерительным электродом, эталонным электродом и контролируемой поверхностью остается неизменной а потому вибрации не оказывают влияния на показания преобразователя. 1 ил.
///////////////////////////////////
| Левшина Е.С | |||
| и Новицкий П.В | |||
| Электрические измерения физических величин, Л.: Энергоатомиздат, 1983, с | |||
| Раздвижной паровозный золотник с подвижными по его скалке поршнями между упорными шайбами | 1922 |
|
SU148A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОМПЛЕКСНОГО КОБАЛЬТСОДЕРЖАЩЕГО КАТАЛИЗАТОРА | 1998 |
|
RU2137545C1 |
