Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля профиля деталей сложной формы.
Целью изобретения является повышение производительности контроля за счет совмещения операции определения координат точки контроля и операции определения параметра объекта в этой точке.
На чертеже приведена структурная схема устройства, реализующего способ.
Устройство, реализующее способ триангуляционных измерений, содержит оптически связанные источник 1 света, светоделитель 2, фокусирующий объектив 3 и линейный развертывающий фотоприемник 4, подвижную платформу 5, расположенную перпендикулярно пучку света от источника света, жестко связанную со светоделителем, расположенным под углом к платформе, и предназначенную для закрепления на ней контролируемого объекта 6, упор 7, ограничивающий ход платформы, последовательно соединенные блок 8 обработки выходного сигнала фотоприемника, вход которого соединен с выходом фотоприемника 4, и блок 9 цифровой индикации.
Устройство работает следующим образом.
На подвижную платформу 5 устанавливают контролируемый объект 6, например лопатку, таким образом, чтобы система ее координат совпала с системой координат прибора, что достигается путем использования специального приспособления для зажима хвостовика лопатки. Из источника 1 света на контролируемый объект 6 через светоделитель 2 направляют прямой пучок света по нормали к плоскости перемещения подвижной платформы 5. Рассеянное излучение от поверхности светоделителя 2 фокусируют с помощью объектива 3 и направляют на линейный развертывающий фотоприемник 4. Измеряют расстояние от начала фотоприемника до энергетического центра сигнала, вызванного изображением первой световой марки на светоделителе 2 и определяют координату хi прямого светового пучка. Фокусируют рассеянное излучение от поверхности контролируемого объекта 6 с помощью того же объектива 3 и направляют на линейный развертывающий фотоприемник 4. Измеряют расстояние от начала фотоприемника до энергетического центра сигнала, вызванного изображением второй световой марки на поверхности контролируемого объекта 6, и определяют высоту zi профиля контролируемого объекта в очередном измеряемом сечении. Операции повторяют столько раз, сколько задано точек для контроля в одном сечении объекта 6, после чего перемещают подвижную платформу 5 в поперечном по отношению к объекту 6 направлении y на величину шага сетки контрольных точек и повторяют операции.
На блоке 9 цифровой индикации высвечиваются цифровые эквиваленты расстояний от начала фотоприемника 4 до энергетических центров сигналов, вызванных изображениями световых марок, соответствующих координатам хi и zi точек поверхности объекта 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
SU1834492A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОВЕРХНОСТИ ОБЪЕКТА | 1990 |
|
SU1769574A1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2006 |
|
RU2311610C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ВНУТРЕННЕЙ РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377494C2 |
| ФОТОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ИЗДЕЛИЙ | 1988 |
|
SU1828240A1 |
| Устройство для измерения сложной поверхности | 1987 |
|
SU1529038A1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2311614C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ С РЕЗЬБОВОЙ ПОВЕРХНОСТЬЮ | 2008 |
|
RU2386925C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2299400C2 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является повышение производительности контроля за счет совмещения операции определения координат точки контроля и операции определения параметра объекта в этой точке. Способ триангуляционных измерений реализуется следующей последовательностью операций. Объект 6 помещают на платформе 5, жестко связанной со светоделителем 2, расположенным под углом к поверхности платформы, и установленной с возможностью перемещения перпендикулярно прямому световому пучку от источника. Формируют прямой световой пучок и направляют его через светоделитель 2 под углом к нему на поверхность контролируемого объекта 6, на фотоприемнике 4 формируют изображение первой световой марки, фокусируя рассеянное излучение, отраженное от поверхности объекта 6, и по ее энергетическому центру определяют высоту объекта в точке контроля. Вторую световую марку формируют с помощью фокусирования рассеянного излучения, отраженного от светоделителя 2. Изображение первой и второй световых марок проецируют на один фотоприемник и по энергетическому центру изображения второй световой марки определяют координату точки контроля. 1 ил.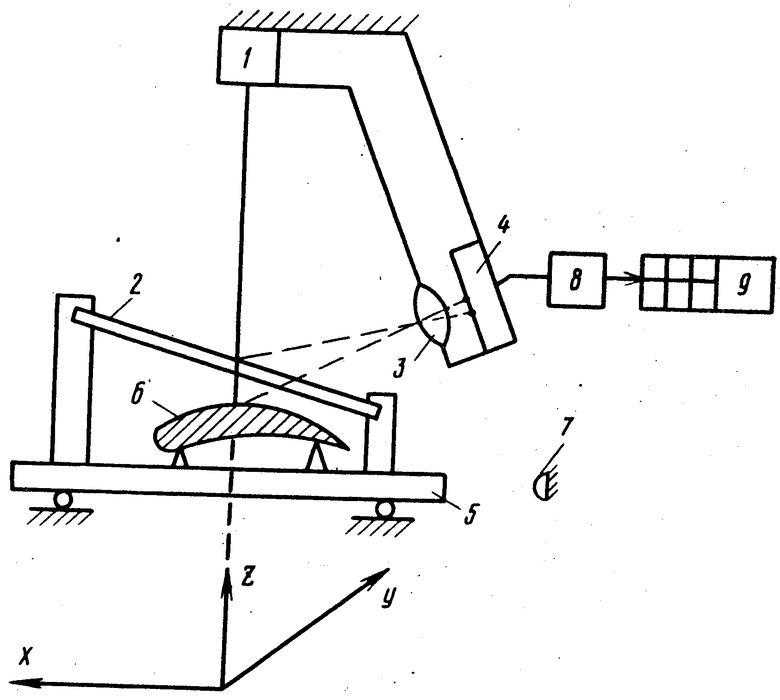
СПОСОБ ТРИАНГУЛЯЦИОННЫХ ИЗМЕРЕНИЙ, заключающийся в том, что устанавливают объект в точку контроля, формируют прямой световой пучок и направляют его через светоделитель под углом к нему на поверхность контролируемого объекта, на фотоприемнике формируют изображение первой световой марки, фокусируя рассеянное излучение, отраженное от поверхности объекта, и по ее энергетическому центру определяют высоту объекта в точке контроля, формируют вторую световую марку и проецируют ее изображение на фотоприемник, отличающийся тем, что, с целью повышения производительности контроля, объект помещают на платформе, жестко связанной со светоделителем, расположенным под углом к поверхности платформы, и установленной с возможностью перемещения перпендикулярно прямому световому пучку, вторую световую марку формируют с помощью фокусирования рассеянного излучения, отраженного от светоделителя, изображение первой и второй световых марок проецируют на один фотоприемник и по энергетическому центру изображения второй световой марки определяют координату точки контроля.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1986 |
|
RU2081437C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
