сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ШВА ТКАНИ | 1992 |
|
RU2064986C1 |
| Многопроцессная линия гальванических покрытий | 1988 |
|
SU1585396A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГЛУБИНОЙ ОБРАБОТКИ ПОЧВЫ ФРОНТАЛЬНЫМ РОТАЦИОННЫМ ВНУТРИПОЧВЕННЫМ РЫХЛИТЕЛЕМ | 2009 |
|
RU2418399C2 |
| Способ и устройство для управления охлаждением режущего инструмента при обработке изделий на оборудовании с ЧПУ | 2018 |
|
RU2709125C2 |
| Устройство для определения междуфазных замыканий и замыканий на землю в сетях с изолированной нейтралью напряжением 6-10 кВ | 2022 |
|
RU2788035C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ХИМИЧЕСКИХ И ГАЛЬВАНИЧЕСКИХ ПОКРЫТИЙ | 2008 |
|
RU2379382C2 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство для обучения и оценки мастерства сварщика | 1990 |
|
SU1777166A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Электрический утюг | 1991 |
|
SU1788992A3 |
Использование: гальванотехника, в частности автоматические и автооператорные многопроцессорные линии с нерегулируемой загрузкой из накопителя, применяемые для переоснащения цехов гальванопокрытий и печатных плат. Гальваническая линия содержит накопитель 5, расположенный в один ряд с ваннами 1 гальванической линии и обслуживаемый одним автооператором, причем каждая позиция накопителя 5 содержит декодирующее устройство, взаимодействующее с кодировщиками подвесок 7. Информация с декодирующих устройств через адаптеры 10 поступает на линию связи 11, соединенную с бортовым контроллером 4, что обеспечивает передачу информации о состоянии накопителя 5 в бортовой контроллер 4. 3 ил.
Ф /г 1
VI VJ о
о
Изобретение относится к гальванотехнике и предназначено для обработки деталей в линии по разным технологическим маршрутам без предварительно созданной очереди.
Наиболее близкой к изобретению по технической сущности является многопроцессорная линия гальванопокрытий, содержащая гальванические ванны, транспортный робот с декодирующим устройством и датчиком позицирования, соединенными с контроллером программного управления транспортным роботом, накопитель с датчиками кода на каждой позиции, соединенными с входом моделирующего устройства, выход которого соединен с входом контроллера.
В этой линии при наличии подвески на позиции накопителя соответствующий датчик кода вырабатывает кодированный сигнал, содержащий информацию о технологическом маршруте, по которому подвеска должна.следовать в линии, передающуюся на моделирующее устройство. Последнее в соответствии с заданной программой определяет последовательность запуска подвесок в обработку с учетом заранее рассчитанного времени протекания каждого маршрута в линии. Вызов транспортного робота на соответствующую позицию накопителя может произойти при условии окончания какого-либо технологического маршрута и переноса соответствующей подвески на позицию демонтажа.
Тем самым последующая загрузка в линию очередной подвески происходит не по фактической готовности линии принять подвеску для обработки, а с задержкой по времени, соответствующей разнице времени фактической готовности линии и временем ее загрузки. Этому способствует отсутствие обратной связи между системой управления транспортным роботом и моделирующим устройством.
Сумма задержек при загрузке подвесок в линию составляет значительную потерю производительности, так как расчетное время прохождения технологического маршрута в линию завышается за счет учета возможных непредвиденных обстоятельств, которые могут увеличить реальное время прохождения технологического маршрута в линии.
Цель изобретения - повышение производительности линии.
В предлагаемой гальванической многопроцессорной линии бортовой контроллер вычисляет время возможности запуска в линию нового технологического маршрута еще до окончания текущего и демонтажа
подвески, исходя из реального состояния линии, Тем самым сокращается время между очередными загрузками и повышается производительность линии.
Моделирующее устройство, представляющее собой специализированный или универсальный вычислитель, исключается. Его функции передаются бортовому контроллеру, в котором наращивается объем па0 мяти. Кроме того, исключено декодирующее устройство на транспортном роботе.
Бортовой контроллер соединен линией связи (возможно той же, что и в прототипе), с каждым адаптером, один из выходов кото5 рого соединен с соответствующим входом последующего, а другой выход последнего адаптера соединен с соответствующими входами каждого адаптера, причем параллельные входы всех адаптеров соединены с
0 выходами датчиков кода соответствующих позиций накопителя.
Для повышения помехозащищенности в качестзе линии передачи данных может быть использован инфракрасный канал. В
5 этом случае система передачи данных дополняется приемопередатчиками инфракрасного излучения.
На фиг. 1 показана структурная схема предлагаемой линии; на фиг. 2.3- варианты
0 электрических схем адаптера и датчика кода.
Линия содержит гальванические ванны 1, транспортный робот 2, с датчиком позиционирования 3 и бортовым контроллером
5 4. накопитель 5, позиции 6 накопителя, подвески 7 и перестраиваемыми кодировщиками, датчики кода 8 накопителя, позиционирующие устройства 9 на гальванических ванных и позициях накопителя,
0 адаптеры 10 и линию связи 11.
В предлагаемой линии ходовые пути (на фиг. 1 не указаны для упрощения) служат для перемещения транспортногс робота вдоль гальванических ванн 1 и накопителя
5 5. На транспортном роботе 2 размещен бортовой контроллер 4, управляющий механизмами транспортного робота, и датчик позиционирования 3, ответные части которого закреплены у каждой гальванической
0 ванны 1 и позиции 6 накопителя.
Бортовой контроллер 4 соединен линией связи 11с выходами всех адаптеров 10. В свою очередь, другие входы (многоразрядные) соединены с выходами соответству5 ющих датчиков кода 8, расположенных на каждой позиции накопителя и взаимодействующих с кодированными пластинами подвесок. Каждая позиция накопителя 5 и гальванические ванны 1 имеют позиционирующие устройства 9. взаимодейстЕ.ующие
с датчиком кода 3 транспортного робота 2. Адаптеры 10 могут быть расположены на каждой позиции накопителя.
Линия работает следующим образом. В исходном состоянии при незагруженных ваннах 1 транспортный робот 2 находится на любой из позиции линии. Накопитель 5, содержащий п подвесок на позициях 6, загружен произвольно (может быть загружен неполностью). При включении бортовой контроллер 4 вырабатывает и посылает в линию связи 11 пачку импульсов, число которых равно числу разрядов датчика кода 8 накопителя. На каждой позиции 6 накопителя, содержащей подвеску, датчик кода 8 вы- рабатывает сигнал в виде 8-разрядного параллельного кода, который поступает на входы соответствующих адаптеров 10.
Первый адаптер 10. на который поступает пачка импульсов из линии связи 11, вырабатывает и посылает в линию связи 11 содержащееся в адаптере 10 разрядное слово в последовательном коде. На каждый импульс, поступающий с бортового контроллера 4. следует задержанная во времени посылка с адаптера в виде нуля или единицы. Сообщение из линии связи принимается бортовым контроллером, причем посылки, им формируемые, служат синхронизирующими сигналами. Сообщение деко- дируется. заносится в ОЗУ контроллера. Для большей достоверности посылка может быть повторена.
Выходные сигналы адаптера блокируют его вход.
После окончания первой посылки первый адаптер блокируется и следующая посылка поступает на вход второго адаптера, где все вышеописанные действия повторяются. После окончания работы последнего адаптера с его выхода и на все адаптеры поступает сигнал, деблокирующий адаптеры, что делает их готовыми к новому циклу работы.
Полученная бортовым контроллером информация обрабатывается по заданному алгоритму, и выбирается оптимальная последовательность загрузки подвесок в линию.
Транспортный робот 2 перемещается к накопителю 5, останавливается у выбранной очередной позиции 6. которую идентифицирует с помощью датчика позиционирования 3. забирает подвеску 7 и перемещает ее в соответствующую гальва- ническую ванну 1.
Таким образом, в обработку загружаются все возможные по расчету подвески. Когда появляется возможность загрузки в обработку какого-либо нового технологического маршрута, бортовой контроллер 4 аналогично описанному выше опрашивает адаптеры 10 накопителя 5.
Полученная информация анализируется, и, если в накопителе 5 содержится подвеска 7, которая может быть запущена в обработку, транспортный робот 2 переносит ее в соответствующую по маршруту ванну 1. Если накопитель 5 не содержит подвески с соответствующим технологическим маршрутом, опрос адаптеров 10 периодически повторяется до определения подвески с подходящим технологическим маршрутом.
Алгоритм загрузки может быть скорректирован так, что загружаться будет неоптимальный для данной ситуации маршрут, тем самым исключается возможность переноса обработки какого-либо маршрута на неопределенное время.
Датчики кода 8 накопителя, расположенные на позициях 6 накопителя, представляют собой, например, инфракрасные приемопередатчики типа датчика позиционирования 3, на набор пластин, кодирующий информацию, расположен на подвесках 7. .
Пластинами набирается код. содержащий информацию о технологическом маршруте данной подвески. Код может быть изменен для любого конкретного маршрута.
Система позиционирования состоит из датчика позиционирования 3, закрепленного на транспортном роботе 2. и позиционирующих устройств 9. расположенных на ваннах 1 и позициях накопителя 6.
Датчик 3 может представлять собой ряд инфракрасных приемопередатчиков, сгруппированных попарно, взаимодействующих с позиционирующими устройствами, закрепленными, например, на гальванических ваннах и позициях накопителя.
Позиционирующие устройства представляют собой набор пластин, которые пе- рекрываютсветовойпоток
соответствующей пары приемник-передатчик при передвижении транспортного робота. Кодирование производится, например, в двоичном коде. Максимальное число пластин и, соответственно, пар приемопередатчиков соответствует суммарному числу ванн и позиций накопителя.
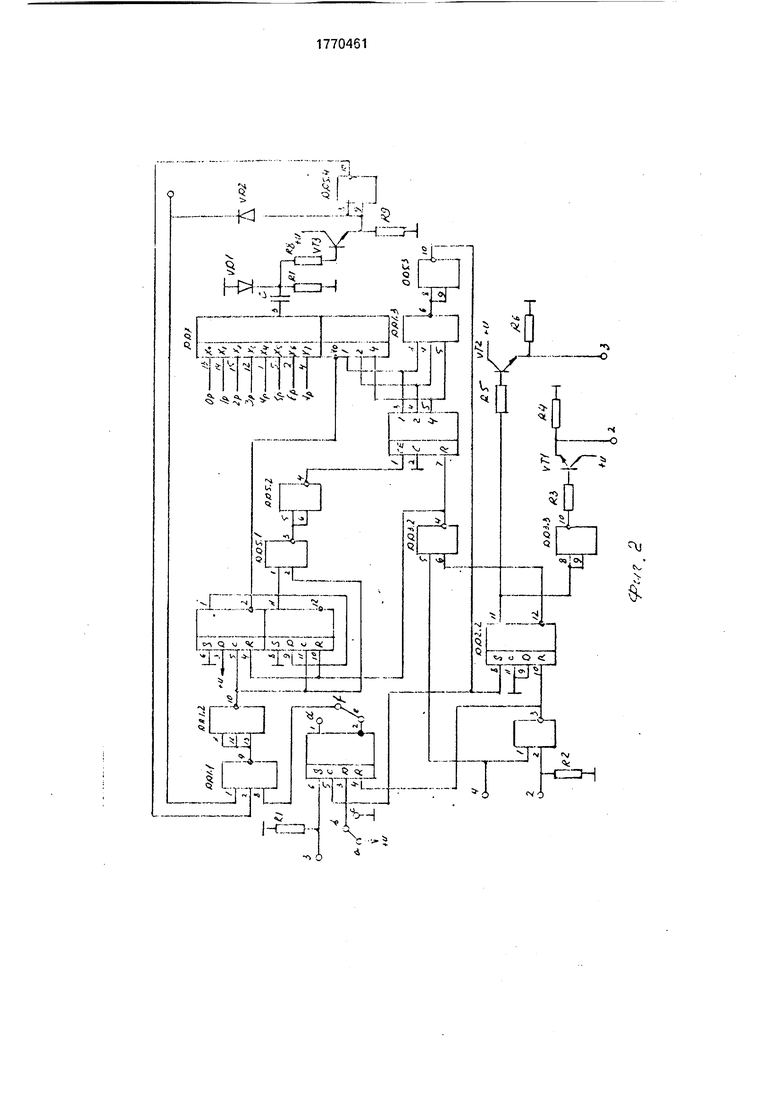
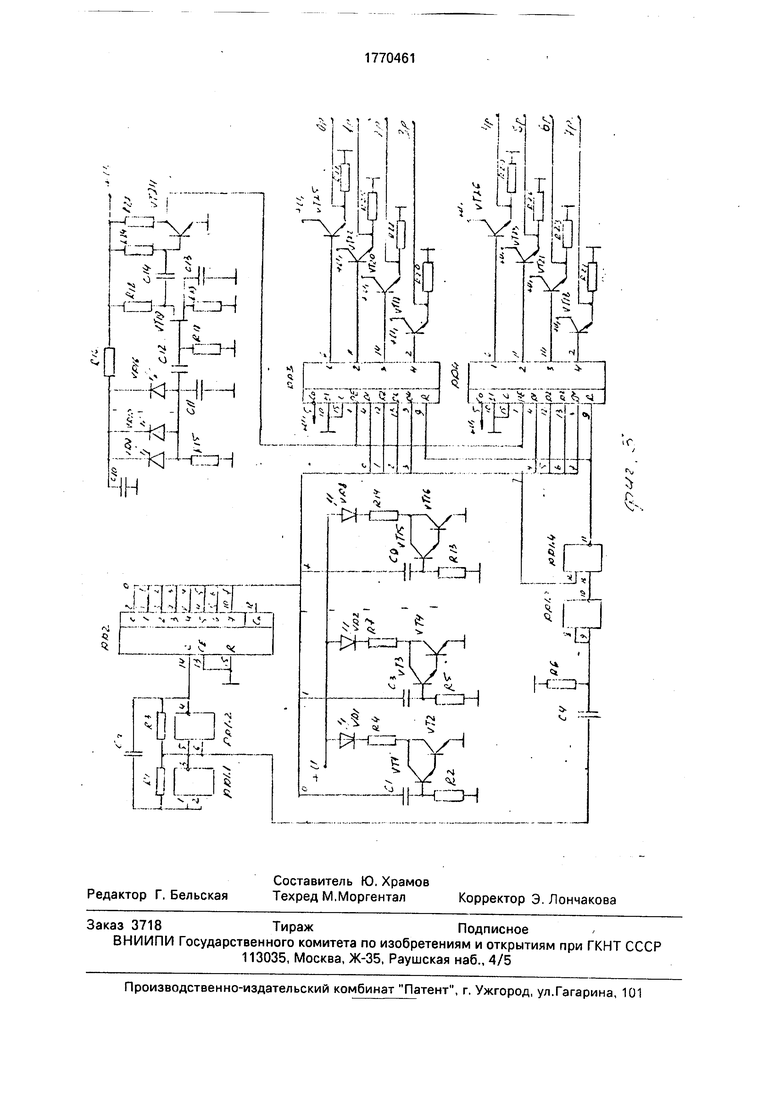
На фиг. 2 представлен один из вариантов схемы адаптера.
Перемычки a. b и е. f соответствуют пер вому в последовательной цепочке адаптеров. Перемычки be и df соответствуют всем последующим адаптерам.
Входы Хо-Х мультиплексора DD7 соединяются с выходами соответствующих датчиков кода накопителя.
При включении питания по выходу 4 поступает последовательность сигналов низкого уровня, которые инвертируются на DD3.1 и поступают на R-входы триггеров DD2 и DD4 и счетчика DD6, устанавливая их в исходное состояние.
При этом адаптер, стоящий в цепочке первым, открыт по входу 8 DD1.1 сигнал ом высокого уровня с DD2.1, а остальные адаптеры в последовательной цепочке закрыты по этому входу низким уровнем с 1 DD2.1.
С линии передачи на вход 1 поступает первый и из пачки в 8 импульсов сигнал, через DD1.1 и DD1.2 он поступает на вход С2 триггера DD4.1, Триггер опрокидывается, низкий уровень с 2 DD4 поступает на вход V0 мультиплексора DD7, и на выход 3 поступает сигнал, соответствующий состоянию входа Х0, т.е. первому разряду слова, снимаемого с датчика кода. Сформированный на RC-цепочке положительный импульс поступает на вход эмиттерного повторителя V ТЗ и с его выхода через диод V D2 поступает в линию. Одновременно инвертированный на DD5.4 этот сигнал поступает на вход 2 DD1.1 и блокирует прохождение этого сигнала через DD1.1. Высокий уровень с 1 DD1.1 поступает на D-вход триггера DD4.2 и подготавливает его к приходу следующего импульса, который по входу С опрокидывает DD4.2, на выходе 11 DD4.2 и входе 1 DD5.1 устанавливается высокий уровень, и второй импульс из пачки с выхода 10 DD1.2 через DD5.2 поступает на вход 1 счетчика DD6, а его спад заносит в счетчик 1. При этом в мультиплексоре DD7 открывается канал Х1, и если на Х1 присутствует 1, то она, как описано выше, преобразуется в положительный импульс, поступающий в линию. После поступления 8-го импульса низкий уровень с DD1.3 через инвертор DD5.3 устанавливает по S-входу DD2.2 высокий уровень на 11 DD2.2 и низкий на 12 DD2.2, который через DD3.2 сбрасывает в исходное состояние счетчик DD6 и триггер DD4.
Сигналом с 10 DD5.3 триггер DD2.1 устанавливается в единичное состояние, и сигнал с 2 D2.1 блокирует прохождение сигнала из линии в первый адаптер.
На вход 3 второго адаптера с выхода V Т2 поступает сигнал высокого уровня и по
входу S триггер DD2.1 устанавливается в единичное состояние, открывая ключ DD1.1 и разрешая прохождение в схему следующих 8 импульсов. Работа второго адаптера происходит аналогично первому Сигнал
окончания второй пачки поступает на С- вход триггера DD2.1, устанавливая его в нулевое положение, после чего второй адаптер блокируется по входу, а высокий уровень с выхода V Т2 подготавливает к
работе 3-й адаптер.
После окончания всего сообщения с выхода V Т1 последнего адаптера на входы 2 всех адаптеров поступает сигнал, устанавливающий их в исходное состояние.
Формула изобретения
Многопроцессная линия гальванопокрытий, содержащая гальванические ванны, накопитель с позиционирующими устройствами и датчиками кода на каждой позиции,
подвески с перестраиваемыми кодировщиками, транспортный робот с бортовым контроллером и датчиком позиционирования, отличающаяся тем, что, с целью повышения производительности, она оснащена адаптерами, каждый из которых установлен на соответствующей позиции накопителя, бортовой контроллер соединен с каждым адаптером, один из выходов которого соединен с соответствующим входом
каждого последующего, а другой выход последнего адаптера соединен с соответствующими входами всех адаптеров, причем параллельные входы всех адаптеров соединены с выходами датчиков кода соответствующих позиций накопителя.
| Многопроцессная линия гальванических покрытий | 1988 |
|
SU1585396A1 |
