(Л
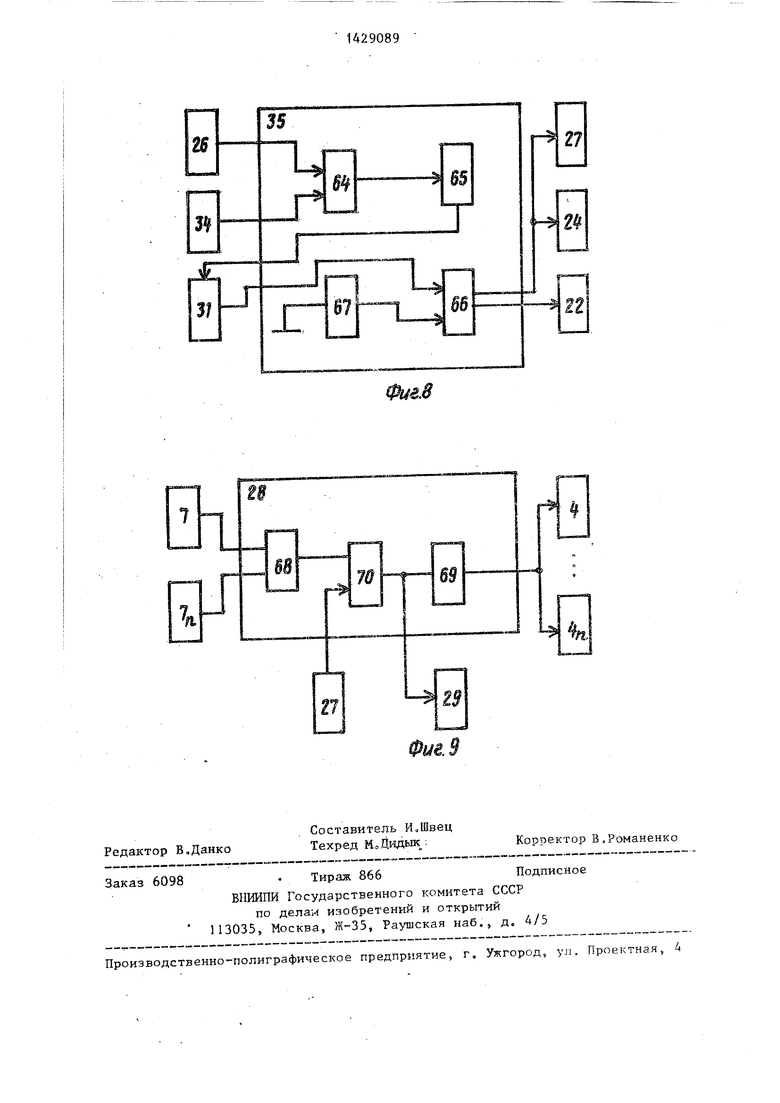
вольной последовательности. Уегрой- ство для программного управления в- тооператорами содержит по числу автооператоров блок 1 оперативной памяти маршрутов, счетчик 2 комавд, блок 3 управления считывайием команд, блок ;4 анализа выполнения команд, блок 10 контроля перемещения автооператора, блоки 13 формирования маршрута автооператора, тактовый генератор 26, пульт 27 управления, блок 28 анализа выполнения программы технологического процесса, блок 29 контроля ритма выхода подвесок с деталями,, блок 30 точного времениj блок 31 дискретной модели гальванической ли1429089
НИИ, блок 35 анализа окончания проверки технологического процесса„ Данное устройство обеспечивает параллельность обработки различных технологических процессов нанесения защитных покрытий для подвесок с деталями, маршруты автооператоров формируются на основе заранее рассчитанных совмещающихся во времени циклограмм, которые позволяют оптимальным образом строить маршруты и исключают возможность передержки деталей в ваннах, возникающей вследствие необходимости одновременного обслуживания одним автооператором различных технологических операций 9 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Устройство программного управления автооператорами гальванической линии | 1981 |
|
SU969794A1 |
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Устройство программного управления линией гальванопокрытий | 1985 |
|
SU1339169A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
| Устройство для программного управления | 1979 |
|
SU842713A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
Изобретение относится к классу дискретных автоматических систем для управления автоматическими линиями гальванопокрытий и может быть использовано для управления объектами, аналогичными ливням гальванопокряятий, Цель изобретения - повьпиение производительности гальванической линии за счет обеспечения параллельной обработки различных технологических деталей запускаемых на линию в пронз
Изобретение относится к классу дискретных автоматических систем для управления автоматическими линиями гальванопокрытий и может быть использовано для управления объектами, ана логичными линиям гальванопокрытий.
Цель изобретения - повьшгение производительности гальванической линии за счет обеспечения параллельной обработки по различным технологическим процессам деталей, запускаемых на линию в произвольной последовательности.
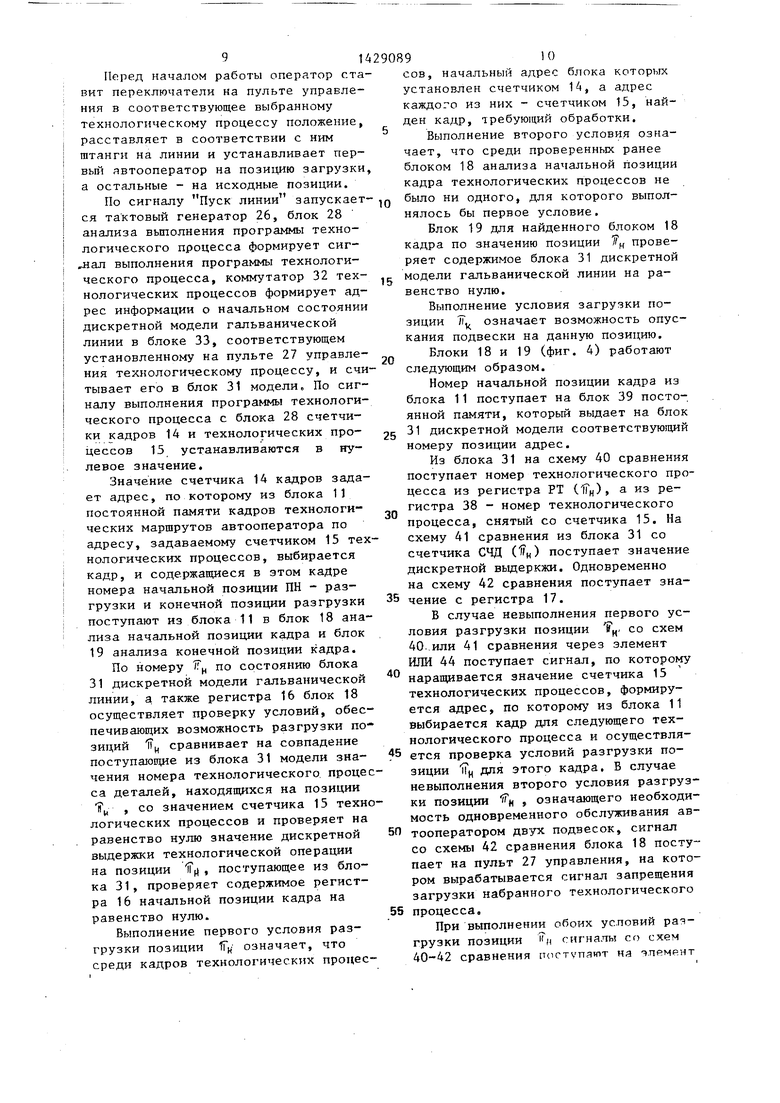
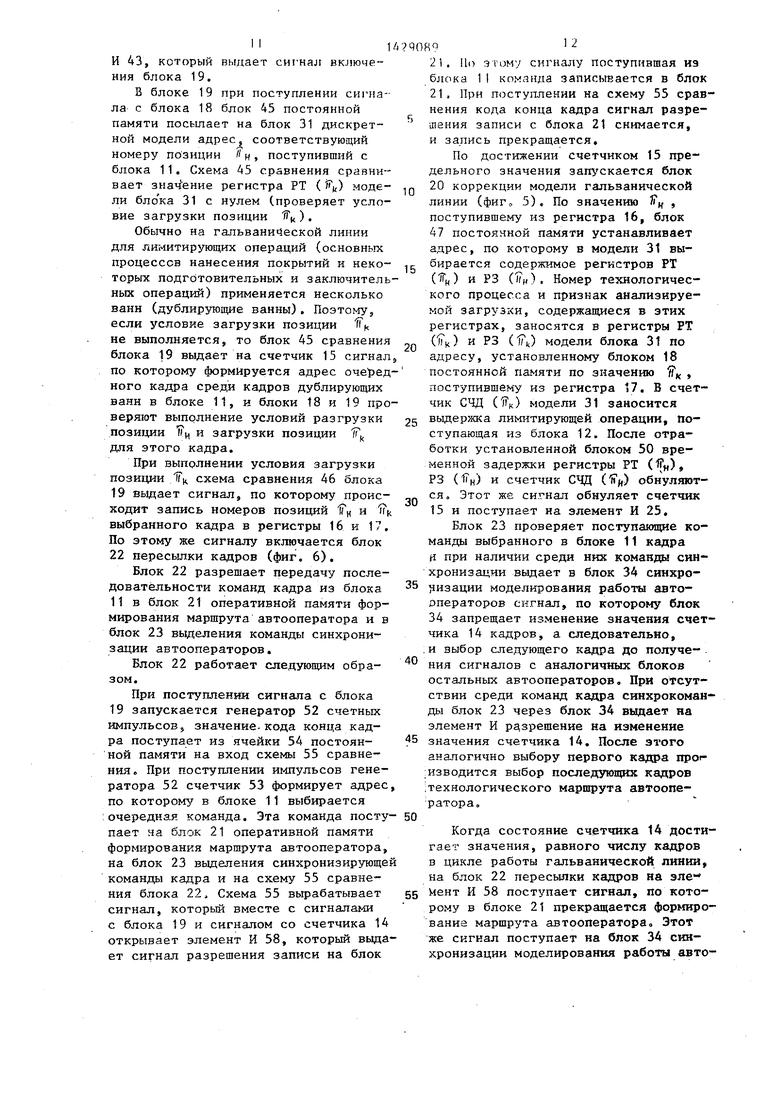
На фиг, 1 изображена блок-схема предлагаемого устройства} на фиг. 2- схема блока формирования маршрута автооператора , на фиг. 3 - схема счетчика кадровj на фиг. 4 - схема блока анализа начальной позиции кадра и конечной позиции кадра; на фиг. 5 - схема блока коррекции дискретной модели гальванической линии , на фиг о 6 - схема блока пересылки кадров маршрутов автооператоровj на фиг. 7 - схема блока пересылки маршрута автооператора; на фиг, 8 - схема блока анализа окончания проверки технологического процесса) на фиг. 9 - схема блока анализа выполнения программы технологического процесса
Устройство содержит по числу ав- тооператоров блок 1 оперативной памяти маршрутов, счетчик 2 команд, блок 3 управления считыванием команд
блок 4 анализа выпол1 ения команд, регистр 5 адреса перемещения автооператора, блок 6 управления автооператором, блок 7 выделения синхронизирующей команды программ управления автооператором, блок 8 полупостоянной памяти технологических вьщержек времени, блок 9 отработки технологических вьщержек времени, блок 10 контроля перемещения автооператора, блок 11 постоянной памяти кадров технологических маршрутов автооператора, блок 12 постоянной памяти дискретных технологических выдержек лимитирующих операций, блок 12 формирования маршрута автооператора.
Каждый блок 13 формирования маршрута автооператора (фиг. 2) содержит счетчик 14 кадров, счетчик 15 технологических процессов, регистр
16начальной позиции кадра, регистр
17конечной позиции кадра, блок 18 анализа начальной позиции кадра, блок 19 анализа конечной позиции кадра, блок 20 коррекции модели гальванической линии, блок 21 оперативной памяти формирования маршрута автооператора, блок 22 пересылки кадров маршрута автооператора, блок 23 вьщелення синхронизирующей команды кадра, блок 24 пересылки маршрута автооператора, элемент И 25.
Устройство содержит также общие для всех автооператоров тактовый генератор 26, пульт 27 управления.
блок 28 анализа выполнения программы технологического процесса, блок 29 контроля ритма выхода подвесок с деталями, блок 30 точного времени, блок 31 дискретной модели гальвани- ческой линии, коммутатор 32 технологических процессов, блок 33 начального состояния дискретной модели гальванической линии, блок 34 синхро-.,-. низации моделирования работы автооператоров, блок 35 анализа окончания проверки технологического процесса, ячейку 36 постоянной памяти, счетчик 37, регистр 38, ячейку 39 g постоянной памяти, блок 40 сравнения, блоки 41 и 42 сравнения, элемент И 43, элемент ИЛИ 44, ячейку 45 постоянной памяти, блок 46 сравнения, блоки 47 и 48 постоянной памяти, инвертор 49, блок 50 временной задержки, элемент И 51, генератор 52 счетных импульсов, счетчик 53 импульсов, ячейку 54 постоянной памяти, блок 55 сравнения элемента ИЛИ 56, инвертор 57, элемент И 58, триггер 59, элемент И 60, генератор 61 счетных импульсов, ячейку 62 постоянной памяти и счетчик 63 импульсов.
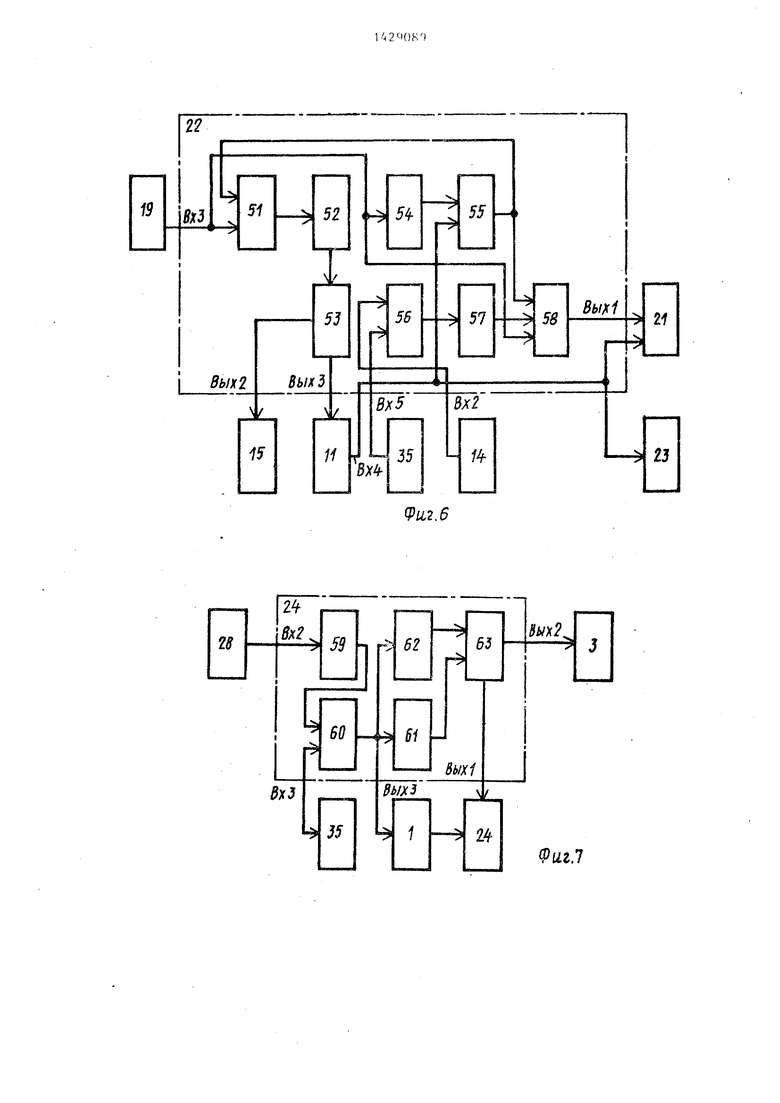
В соответствии с функциональным назначением блока 35 анализа окончания проверки технологического процесса он при поступлении тактового импульса с тактового генератора 26 и сигнала с блока 34 синхронизации мо20
25
30
маршрут И г релвижения авто-оператора для текущего цикла работы. Маршрут автооператора представляет собой последовательность команд артоопера- тору на выполнение транспортных операций: перемещения к заданной позиции j подъем и опускания подвески, а также команды синхронизации автооператоров, служащих для соблюдения последовательности обслуживания ванн и предотвращения наездов друг на друга в течение цикла работы гальванической линии.
Счетчик 2 команд служит для формирования адреса считывания очередной команды автооператору.
Блок 3 управления считьшанием служит для считывания из блока 1 оперативной памяти маршрутов передвижения автооператоров, а из блока 8 - полупостоякной памяти соответствующих технологических вьщержек времени,
Блок 4 анализа выполнения команд служит для определения момента выполнения автооператором заданной команды, т.е. прихода автооператора в заданную командой перемещения ванну и отработки заданной технологической выдержки времени. Регистр 5 адреса .; перемещения служит для запоминания команды перемещения на время ее обработки автооператором.
Блок 6 управления автооператором
делирования работы автооператоров вы- 35 помощью датчиков, установленных на
дает, в зависимости от наличия в, ре- : гистре РЗ блока 31 дискретной модели i гальванической линии признака анализи ;руемой загрузки,разрешающий сигнал на загрузку техпроцесса и на пересып ку маршрута автооператора на пульт 27 управления и на блок 24 пересылки маршрута автооператора или сигнал, запрещающий блоку 22 пересылки кадров маршрутов автооператора пересылку кадров.
В связи с этим функциональным назначением он состоит из элемента И 64, ячейки 65 постоянной памяти, в которой хранится адрес регистра РЗ блока 31 дискретной модели гальванической линии, блока 66 сравнения и инвертора 67 (фиг. 8).
Блок 28 помимо элемента И 68 и блока 69 задержки должен быть дополнен элементом ИЛИ 70 (фиг. 9),
Блок 1 представляет собой оперативную память, в которой содержится
-. g
0
5
0
маршрут И г релвижения авто-оператора для текущего цикла работы. Маршрут автооператора представляет собой последовательность команд артоопера- тору на выполнение транспортных операций: перемещения к заданной позиции j подъем и опускания подвески, а также команды синхронизации автооператоров, служащих для соблюдения последовательности обслуживания ванн и предотвращения наездов друг на друга в течение цикла работы гальванической линии.
Счетчик 2 команд служит для формирования адреса считывания очередной команды автооператору.
Блок 3 управления считьшанием служит для считывания из блока 1 оперативной памяти маршрутов передвижения автооператоров, а из блока 8 - полупостоякной памяти соответствующих технологических вьщержек времени,
Блок 4 анализа выполнения команд служит для определения момента выполнения автооператором заданной команды, т.е. прихода автооператора в заданную командой перемещения ванну и отработки заданной технологической выдержки времени. Регистр 5 адреса .; перемещения служит для запоминания команды перемещения на время ее обработки автооператором.
Блок 6 управления автооператором
40
45
50
55
ваннах линии, следит за местонахождением автооператора, в соответствии
С командой перемещения определяет направление перемещения автооперато- ра и формирует соответствующие управляющие сигналы..
Блок 7 выделения синхронизирующей команды служит для формирования сигнала о выполнении программы технологического маршрута данного автооператора выбранного технологического про|цесса,
Блок 8 полупостоянной памяти пред назначен для хранения выдержек времени технологических процессов и выполнен в виде набора программных переключателей, что позволяет оперативно изменить величину технологических
выдержек времени.
Блок 9 отработки технологических
1задержек времени отрабатывает задан- ное время технологического выстоя автооператора.
10
15
20
Блок 10 контроля перемещения автооператора служит для обнаружения задержки автооператора при движении его в промежутке между датчиками положения автооператоров выше допустимого времени и последующего аварийного отключения питания двигателей автооператоров.
Блок 11 постоянной памяти кадров технологических маршрутов автооператоров представляет собой постоянную память на интегральных схемах в виде сменных модулей, в которой записаны кадры технологических процессов. Кадры представляют собой фрагменты маршрутов автооператора;, соответствующие участкам непрерывного обслуживания автооператором одной единицы загрузки (без расцепления с подвеской). Каждый кадр содержит последовательность команд транспортных операций, команду синхронизации при наличии ее в кадре и код окончания кадра, а также информацию о номере позиции, на которой осуществляется первая разгрузка в кадре, номере по- зиции, на которой осуществляется последняя загрузка в кадре.
Блок 12 постоянной памяти технологических вьщержек лимитирующих операций представляет собой постоянную память на интегральных микросхемах и предназначен для хранения технологических выдержек времени лимитирующих операций (операций, длитель-; ность которых превьшает один цикл), представленных в дискретном виде (в виде числа целых циклов)„
Блок 13 формирования маршрутов автооператора предназначен для анализа совместимости выбранного для запуска технологического процесса с находящимися в обработке на гальванической линии и формирования транспортного маршрута автооператора для очередного цикла работы линии путем выбора кадров технологических маршрутов автооператора из блока 11. Формирование транспортного маршрута путем выбора кадров технологических маршрутов обеспечивается тем, что при расчете маршрута автооператора для каждого отдельного технологического процесса гальванопокрытий учитывается возможность покадрового совмещения этих маршрутов при одновременной обработке на гальванической линии подвесок по различным тех30
25
40
45
50
55
нологическим процессам. Это легко осуществляется, например, для тех- - нолог дческих маршрутов, отличающихся номерами основных ванн нанесения покрытий, отдельных ванн на подготовительных и заключительных стадиях, а также для случая различных толщин одного вида покрытия. Построение оптимальных технологических маршрутов для отдельных -вехнологических процессов осуществляется вручную или с применением систем подготовки управляющих программ на базе злектрон- ных вычислительных машин.
0
0
Счетчики кадров 14 и технологических процессов 15 служат для определения очередного кадра по порядку следования в цикле работы линии и задания его адреса в блоке 11 постоянной .памяти кадров. На фиг. 3 представлена реализация счетчика 14 кадров.
Регистр 16 начальной позиции кад- 5 Ра служит для размещения в нем номера ванны р с которой поднимается загрузочное приспособление в начале отработки очередного кадра«
Регистр 17 конечной позиции кадра служит для размещения в нем номера ванны, на которую опускается загрузочное приспособление в конце отработки кадра. Блок 18 анализа начальной позиции кадра предназначен для проверки возможности разгрузки автооператором ванны в начале отработки кадра
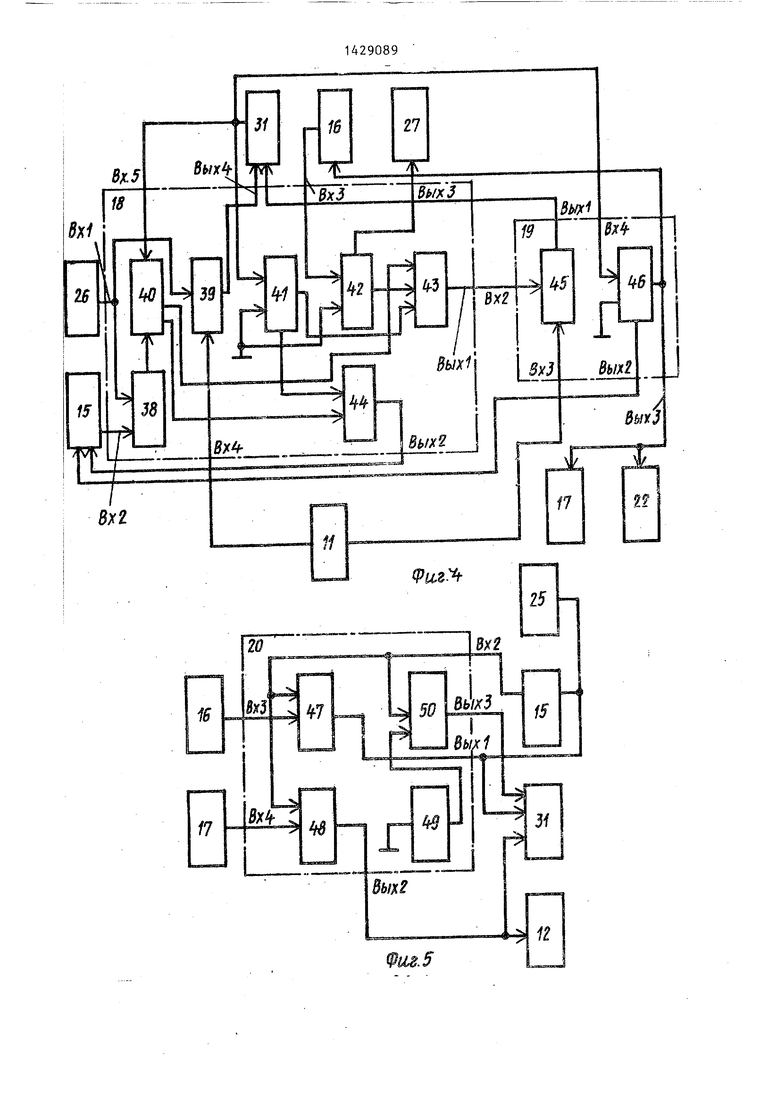
Блок 19 анализа конечной позиции кадра предназначен для проверки возможности загрузки ванны автооператс- ром в конце отработки выбранного кадра. На .фиг. 4 пpeдcтaвлe вариант реализации блоков анализа начальной позиции кадра. 18 и анализа конечной позиции кадра 19е
Блок 20 коррекции дискретной модели гальванической линии (фиг, 5) предназначен для изменения состояния регистров блока 31 дискретной модели гальванической линии в соответствии с технологическими маршрутами автооператора в кадре при проверке возможности запуска набранного на пульте управления технологического процесса.
Блок 21 оперативной памяти формирования маршрута автооператора служит для размещения в нем формируемого на следующий цикл работы гальва0
5
0
5
/
нической линии маршрута лередвижеиг; автооператора.
Блок 22 пересыпки кадров маршрутов автооператоров (фиг. 6) ocyniecT- вляет пересылку кадров в блок 21 оперативной памяти формирования мар 1шрутов автооператора в процессе их ;формирования.
Блок 23 выделения синхронизирующей Q команды кадра технологического маршру- та автооператора предназначен для формирования сигнала о наличии в кадре команды синхронизации работы автооператоров „ Этот блок представляет собой схему сравнения.
Блок 24 пересыпки маршрута автооператора (фиг. 7) предназначен для передачи сформированного в блоке 21 оперативной памятИ формирования маршрута автооператора в блок 1 оперативной памяти маршрута автооператора при окончании проверки на допустимость к запуску установленного
290
15
20
на пульте 27 управления технологичес- 25 т™ о начальном состоянии дискретной :кого процесса и окончании выполнения маршрута автооператора предыдущего
цикла работы гальванической линии.
модели 31 гальванической линии в соответствии с набранным на пульте 27 номером технологического процесса. Дом1 татор построен на микросхемах К155ЛА2, и в зависимости от номера технологического процесса, поступающего на входы микросхем, с их выхода снимается адрес блока 33 постоянной Памяти начального состояния модели гальвани ческой линии.
Элемент И 25 предназначен для выдачи сигнала на изменение значения счетчика 14 кадрой при поступлении разрешающих сигналов с блока 34 синхронизации моделирования работы автооператоров и блока 21 коррекции модели гальванической линии. Тактовый генератор 26 предназначен для выработки импульсов синхронизации работы устройства
Пульт 27 управления служит для пуска и останова линии, для контроля за работой линии, а также для сигнализации о допустимости к запуску на гальваническую линию проверяемого технологического процесса.
Блок 28 анализа выполнения программы технологического процесса служит для определения момента окончания выполнения программы технологического цикла обработки деталей.
Блок 29 контроля ритма вьпсода |Подзесок осуществляет контроль време ни технологического цикла обработки деталей. При превышении времени выполнения технологического цикла допустимых пределов изменения заданного ритма выхода подвесок этот блок формирует соответствующий сигнал на пульт 27 управления.
Q
9089
Jla 1 Ч11ь JU времени служит для фор- импульсов точного времени. Блок 31 д1;скретной модели гальванической линии слу-ргит для моделирования работы линии при запуске в обработку очередного технологического процесса с целью проверки его допустимости. Дискретная модель 31 реализована в виде блоков по числу позиций гальванической линии, каждый из которых включает регистр РТ ()Г) номера технологического процесса, обрабатываемого на позиции, счетчик СЧ71 дискретного значенкя текущей длительности технологической операции, выраженного в виде целого числа циклов, и регистр РЗ (IF) признака анализируемой загрузки, служащей для определения момента окончания проверяемого технологического процесса , где п 1 ,.. .
Коммутатор 32 технологических процессов устанавливает адрес информа5
0
- 25 т™ о начальном состоянии дискретной
30
35
40
-
45
55
модели 31 гальванической линии в соответствии с набранным на пульте 27 номером технологического процесса. Дом1 татор построен на микросхемах К155ЛА2, и в зависимости от номера технологического процесса, поступающего на входы микросхем, с их выхода снимается адрес блока 33 постоянной Памяти начального состояния модели гальвани ческой линии.
Блок 33 постоянной памяти начального состояния дискретной модели гальванической линии представляет собой постоянную память на интегральных микросхемах и содержит информацию О состоянии дискретной модели 27 при Начальном запуске линии по каждому 13 технологических процессов.
Блок 34 синхронизации моделирова- НИН работы автооператоров предназначен для синхронизации во времени процесса выбора кадров для различных автооператоров при наличии в кадрах синхронизирующих команд, а следовательно, и для синхронизации процесса коррекции дискретной модели 31 гальванической линии.
Блок 35 анализа окончания проверки технологического процесса служит для определения момента окончания проверки заданного технологического процесса и выдачи сигнала разрешения на его загрузку.
Перед началом работы оператор ставит переключатели на пульте управления в соответствующее выбранному технологическому процессу положение, расставляет в соответствии с ним гатанги на линии и устанавливает первый автооператор на позицию загрузки а остальные - на исходные позиции.
По сигналу Пуск линии запускается тактовый генератор 26, блок 28 анализа вьтолнения программы технологического процесса формирует сиг- Д1ал выполнения программы технологического процесса, коммутатор 32 технологических процессов формирует адрес информации о начальном состоянии дискретной модели гальванической линии в блоке 33, соответствующем установленному на пульте 27 управления технологическому процессу, и считывает его в блок 31 модели. По сигналу выполнения программы технологического процесса с блока 28 счетчики кадров 14 и технологических процессов 15 устанавливаются в нулевое значение.
Значение счетчика 14 кадров задает адрес, по которому из блока 11 постоянной памяти кадров технологических маршрутов автооператора по адресу, задаваемому счетчиком 15 технологических процессов, выбирается кадр, и содержащиеся в этом кадре номера начальной позиции ПН - разгрузки и конечной позиции разгрузки поступают из блока 11 в блок 18 анализа начальной позиции кадра и блок 19 анализа конечной позиции кадра.
По номеру по состоянию блока 31 дискретной модели гальванической линии, а также регистра 16 блок 18 осуществляет проверку условий, обеспечивающих возможность разгрузки позиций 1, сравнивает на совпадение поступающие из блока 31 модели значения номера технологического процесса деталей, находящихся на позиции , , со значением счетчика 15 технологических процессов и проверяет на равенство нулю значение дискретной выдержки технологической операции на позиции 1Г( , поступающее из блока 31, проверяет содержимое регистра 16 начальной позиции кадра на равенство нулю.
Выполнение первого условия разгрузки позиции Гк означает, что среди кадров технологических процес0
сов, начальный адрес блока которых установлен счетчиком 14, а адрес каждого из них - счетчиком 15, найден кадр, требующий обработки.
Выполнение второго условия означает, что среди проверенных ранее блоком 18 анализа начальной позиции кадра технологических процессов не
было ни одного, для которого выполнялось бы первое условие.
Блок 19 для найденного блоком 18 кадра по значению позиции 7 проверяет содержимое блока 31 дискретной
ц модели гальванической линии на равенство нулю.
Выполнение условия загрузки позиции означает возможность опускания подвески на данную позицию.
Блоки 18 и 19 (фиг. 4) работают следующим образом.
Номер начальной позиции кадра из блока 11 поступает на блок 39 постоянной памяти, который выдает на блок
5 31 дискретной модели соответствующий номеру позиции адрес.
Из блока 31 на схему 40 сравнения поступает номер технологического процесса из регистра РТ (1) , а из регистра 38 - номер технологического процесса, снятый со счетчика 15. На схему 41 сравнения из блока 31 со счетчика СЧД СПц) поступает значение дискретной вьщеркжи. Одновременно на схему 42 сравнения поступает зна5 чение с регистра 17.
В случае невыполнения первого условия разгрузки позиции Т. со схем 40..или 41 сравнения через элемент ИЛИ 44 поступает сигнал, по которому наращивается значение счетчика 15 технологических процессов, формируется адрес, по которому из блока 11 выбирается кадр для следующего технологического процесса и осуществляь ется проверка условий разгрузки позиции ДЛЯ ЭТОГО кадра, В случае невыполнения второго условия разгрузки позиции н , означающего необходимость одновременного обслуживания авП тооператором двух подвесок, сигнал со схемы 42 сравнения блока 18 поступает на пульт 27 управления, на котором вырабатывается сигнал запрещения загрузки набранного технологического
5 процесса.
При выполнении обоих ус.повий разгрузки позиции сигналы со схем 40-42 сравнения псютупатт на э.пемент
0
0
II1
И 43, который выдает сигнал включения блока 19.
В блоке 19 при поступлении сигнала с блока 18 блок 45 постоянной памяти посылает на блок 31 дискретной модели адрес, соответствующий номеру позиции к, поступивший с блока 11. Схема 45 сравнения сравнивает регистра РТ ( ц) модели бло ка 31 с нулем (проверяет условие загрузки позиции fl ).
Обычно на гальвани1|еской линии для лимитирующих операций (основных процессов нанесения покрытий и некоторых подготовительных и заключительных операций) применяется несколько ванн (дублируюаще ванны). Поэтому, если условие загрузки позиции tT не выполняется, то блок 45 сравнения блока 19 выдает на счетчик 15 сигнал по которому формируется адрес оче|)ед ного кадра среди кадров дублирующих ванн в блоке 11, и блоки t8 и 19 проверяют выполнение условий разгрузки позшдии ц и загрузки позиции 1 для этого кадра.
При выполнении условия загрузки позиции 1Гц. схема сравнения 46 блока 19 выдает сигнал, по которому происходит запись номеров позиций f и % выбранного кадра в регистры 16 и 17. По этому же сигналу включается блок 22 пересылки кадров (фиг. 6).
Блок 22 разрешает передачу последовательности команд кадра из блока 11 в блок 21 оперативной памяти формирования маршрута автооператора и в блок 23 выделения команды синхронизации автооператоров.
Блок 22 работает следующим образом.
При поступлении сигнала с блока 19 запускается генератор 52 счетных импульсов, значение, кода конца кадра поступает из ячейки 54 постоянной памяти на вход схемы 55 сравнения. При поступлении импульсов генератора 52 счетчик 53 формирует адрес по которому в блоке 11 выбирается ;очередная команда. Эта команда поступает на блок 21 оперативной памяти формирования маршрута автооператора, на блок 23 выделения синхронизирующе команды кадра и на схему 55 сравнения блока 22. Схема 55 вьфабатывает сигнал, который вместе с сигналами с блока 19 и сигналом со счетчика 14 открывает элемент И 58, который выдает сигнал разрешения записи на блок
0
qORQ12
21, Ih) этому сигналу поступившая из блока 11 команда записывается в блок 21, При поступлении на схему 55 сравнения кода конца кадра сигнал разрешения записи с блока 21 снимается, и запись прекращается.
По достижении счетчиком 15 предельного значения защ скается блок
д 20 коррекции модели гальванической линии (фиГо 5). По значению Г, , поступившему из регистра 16, блок 47 постоянной памяти устанавливает адрес, по которому в модели 31 выg бирается содержимое регистров РТ () и РЗ (н). Номер технологического процесса и признак анализируемой загрузки, содержащиеся в этих регистрах, заносятся в регистры РТ C/TK ) и РЗ (() модели блока 31 по адресу, установленному блоком 18 постоянной памяти по значению ff , поступившему из регистра 17. В счетчик СЧД CII K) модели 31 заносится
CJ вьщержка лимитирующей операции, поступающая из блока 12. После отработки установленной блоком 50 временной задержки регистры РТ ) РЗ (н) и счетчик СЧД ( « я) обнуляются. Этот же сигнал обнуляет счетчик 15 и поступает на элемент И 25.
Блок 23 проверяет поступающие команды выбранного в блоке 11 кадра ft при наличии среди них команды синхронизации выдает в блок 34 синхро5 )1изации моделирования работы автооператоров сигнал, по которому блок 34 запрещает изменение значения счетчика 14 кадров, а следовательно, :и выбор следующего кадра до получе- .
ния сигналов с аналогичных блоков остальных автооператоров. При отсутствии среди команд кадра синхрокоман- ды блок 23 через блок 34 выдает на элемент И разрешение на изменение
5 значения счетчика 14. После этого аналогично выбору первого кадра npof- :изводится выбор последующих кадров :технологического маршрута автоопе- ратора.
0
Когда состояние счетчика 14 достигает значения, равного числу кадров в цикле работы гальванической линии, на блок 22 пересылки кадров на эле
55 Нент И 58 поступает сигнал, по которому в блоке 21 прекращается формирование маршрута автооператора Этот же сигнал поступает на блок 34 синхронизации моделирования работы авто0
13 14
операторов, который при получении аналогичных сигналов со всея автооператоров вьщает на счетчики СЧД ( всех позиций модели блока 31 сигнал на уменьшение значения вьщержек лимитирующих операций« Этот же сигнал с блока 34 поступает на блок 35 анализа окончания проверки технологического процесса, который проверяет наличие в регистре РЗ блока 31 дискрет ной модели на позиции разгрузки Гсшь ванической линии признака анализир-уе
мой загрузки5 и при вьшолйёнии зтогс условия на пульт 27 упразлевия и на блок 24 пересылки маршрута авто- оператора (фиго 7) выдает сигнал «аз решения загрузки набранного ,на пульте 27 технологического процесса,,
При поступлении этого сигнала вместе с сигналом с триггера 59j установленным блоком 285 на элемент И 60 запускается ген-эратор 61 счеткь ш пульсов и ячейка 62 постоянной памяти устанавливает счетчик 63 в начальное значение,
OAHOBpekeHHo сигнал с элемента И 60 разрешает запись в блоке 1 опе ративной маршрутов автооператора.
С генератора ш-шульсы поступают на счетный вход счетчика и кз блока 21 оперативной памяти формирования маршрутов из ячеек 5 установлен- ных счетчиком5 команды пересылаются в блок 1 По окончании пересылки счетчик 63 выдает на блок 3 управления считыванием, команд сигнал пуска
При отсутствии на позкднн разгрузки гальванической линии регистра РЗ модели блока 31 признака анализируемой загрузки G блока 35 поступает сигнал5 запрещающий передачу блоком 22 из блока 11 в блок 21 комаг-щ кадг ра и устанавливающий счетчики 14 и 15 в начальные значения, осуществляя таким образом дальнейшзпо проверку возможности загрузки заданного на пульте управления технологического процесса
Отработка автооператораы: сформн™ рованньш маршрутов осуществляется аналогично известно111у устройству„
При окончании отработки автооператорами своих маршрутов гш сигналу с блока 28 анализа выполне- ния npoi pai SMbr технологического про™ цесса счетчики кадров 14 и техноло гических процессов 15 устанавливают
9
ся
14
в начальные значения и параллельно с работой гальванической линии начинается формирование маршрутов автооператоров на очередной цикл ра-, боты гальванической линии с учетом загрузки деталей по следующему выбранному технологическому процессу. Таким образом, предложенное устройство программного управления автооператорами обеспечивает параллельность обработки различных технологических процессов нанесения залщтнык покрытий для подвесок с деталями, поступающ1 х на гальваническую линию
Б произвольном порядке5 :ири этом маршруты автоопараторсв фор1-шрЗ тся на основе заранее рассчитанных сов- меща ощихся во времени циклогра1 Ш,,
которые позволяют оптимальным образом строить маршруты автооператоров и исключают возможность передержки деталей в ваннах, возникающую вследствие необходимости одновременного
обслуживания одвш-г автооператором различных техиологическш операций«
Ф .о р м у л а и 3 о 6 р е т е н и .е
Устройство для программного управления автооператорами гальванической линии5 содержащее по числу автоопе- раторОБ счетчики команд, блоки управления считыванием командj блоки анализа выполнения команд регистры адреса перемещения автооператоровj блоки управления автооператора&Шэ блоки выделения синхронизирующей ко- г4андь программ управления автоопера
торами, блоки ПОЛУПОСТОЯНКОЙ ПШ 1ЯТИ
технологических выдержек времени блоки контроля перемещения автоопера- TopoBj а также общий для всех авто- . операторов блок анализа выполнения програм у Ы технологического тфоцессад
блок контроля ритма зрлхода подвесок с деталями э датчик точного времени и нульт управления 5 npi-гчем вход счетчика ком,анд через блок управления считыванием комамд подсоединен к зыходу блока анализа вьшолнейия команд... которьш связан iiepBbfe входом с пер- вьЕл«: выходом блока анализа в.ыпоянения программы технологического процесса, вторьш входом с выходом блока отработки технологических выдержек времени, а третьим зходом - с выходом блока выд еления синхронизирующей команды программы упраБления автоопера
1
торами, выход которого соединен с первым входом блока анплн а выпп.иис- ния программы технологического процесса, блок управления считыванием команд соединен первым выходом с первым входом блока полупрстоянной памяти технологических выдержек времени, пульт управления первым выходом соединен с первым входом блока контроля ритма выхода подвески с деталями, вторым выходом - с выходом блока точного времени, а третьим выходом - с третьим входом блока анализа выполнения программы технологического процесса, блок полупостоянной памяти технологических выдержек времени вторым входом соединен с выходом регистра адреса перемещения, а выходом - с первым входом блока отработки технологических выдержек времени, подключенным к датчику точного времени, выход регистра адреса перемещения автооператора соединен с первым входом блока управления автооператором, связанным с датчиками положекия автооператоров, испол- кительными механизмами автооператоров и с вторьгм входом блока отработки технологических выдержек времени, блок контроля перемещения автооператора подключен первым входом к датчикам положения автооператоров, вторым входом - к датчикам точного времени, а выходами - к входам блоков управления автооператорами, отличающееся тем, что, с целью повьппения производительности гальванической линии путем обеспече- ния параллельной обработки различных ;технологических деталей, запускаемых на линию в произвольной последовательности, в устройство введены тактовый генератор, блок дискретной модели гальванической линии, коммутатор технологических процессов, блок постоянной памяти начального состояния дискретной модели, блок синхронизации моделирования работы автооператоров., блок анапиза окончания проверки технологического процесса, устройство также снабжено по числу автоог.зраторов блоком оперативной памяти маршрутов автооператоров, первый вход которого связан со счетчиком команд, второй вход - с блоком управления считыванием команд, а вы ход с регистром адреса перемещения автооператора, кроме того, устройЦ -)I с,
с- гпо () ж иг1 по числу антооперато- роя (ijioKf M 11(К ГС1Янной памяти кадров тсхиоло; ги сгсих маршрутов автоопера- тора, б током постоянной памяти дискретных технологических выдержек лимитируюп;их операций, блоком форми- ;ровании маршрута автооператора, состоящим и счетчика кадров, счетчика
технологических процессов, регистров начальной тюзиции кадра и конечной позиции кадра, блока анализа начальной позиции кадра, блока анализа конечной позиции кадра, блока коррекдни дискретной модели гальванической линии, блоки пересылки кадров маршрутов автооператора, блока выделения синхронизирующей команды кадра, блока оперативной памяти формирова-
ния маршрута автооператора, блока пересьшки маршрута оператора и элемента И, причем второй вход счетчика кадров связан с выходом элемента И, первый вход которого связан с третьим
вьог.одом блока коррекции дискретной модели гальванической линии, связанным также с четверт1 м входом счетчика технологических процессов, первый выход счетчика кадров связан с
вторым входом блока пересьтки кадров, третий вход которого связан с третьим выходом блока анапиза конечной позиции кадра, связанным также с вторыми входами регистров начальной к конечной позиции кадра, первьй вы- ход блока пересьшки кадров связан с вторым входом блока оперативной памяти формирования маршрута автооператора, второй выход - с вторым входом счетчика технологических процессов, связанным также с вторым выходом блока анализа начальной позиции кадра, третий вход счетчика технологических процессов связан с вторым выходом блока анализа конечной по
зиции кадра, а выход - с вторыми
входами блоков анализа начальной позиции кадра и коррекции дискретной модели гальванической линии третьи входы которых связаны с выходом регистра начальной поз1щии кадра, четвертый вход блока коррекции дискретной модели гальванической линии связан с выходом регистра конечной позиции кадра, первый выход блока анализа начальной позиции кадра связан с вторым входом блока анализа конечной позиции кадра, второй вход блока оперативной памяти формирования
маршрута автооператора связан с первым выходом блока пересылки маршрута автооператора, кроме того, вход тактового генератора соединен с первым выходом пульта управления связанным также с входом блока анализа выполнения программы технологическо™ го процесса, а выход тактового генератора связан с первыми входами блоков постоянной памяти кадров технологических маршрутов автооператора и дискретньт технологических вьщерже лигдатирующих операций всех блоков в составе блока формирования маршрута автооператора, блоков дискретной модели гальванической линии и постоянной памяти начального состояния модели, коммутатора технологических процессов 5 блоков синхронизации моде лирования работы автооператоров и :анализа окончания проверки техноло-, гического процесса, второй выход пульта управления связан с вторым входом кoм гyтaтopa технологических процессов 5 выход которого связан с третьим входом счетчика кадров и вторьм входом блока постоянной памяти начального состояния дискретной модели, второй вход пульта управления связан с первым выходом блока анализа окончания проверки технологического процесса5 связанным также с пятым входом блока пересьшки кадров маршрутов автооператоров,, с четвертыми входами счетчиков кадров и технологических процессов, также связанных с выходом блока анализа выполнения программы технологического процесса, с которым связан третий вход блогга пересьшки маршрута авто- оператора третий вход пульта управления связан с третьим выходом блока анализа начальной позиции кадра, выход блока постоянной памяти нач-аль кого состояния дискретной модели связан с вторьш входом блока дискретной модели гальванической линии третий вход блока дискретной модели гальванической линии связан с выходом блока постоянной дискретных нологических выдержек лимитируюЕЩх операцийJ четвертый вход блока дискретной .модели связан с первым выходом блока анализа конечной позиидн кадра, вторы1 1 выходом блока ксррек дин дискретной модели, с которым также связан второй вход блока пocтo явной памяти дискретных технологичес
-- :
Ш
20
25
30
35
40
45
SO
55
ких выдержек лимитирующих операций, пятый вход с первым выходом блока коррекции дискретной модели и четвертым выходом блока анализа началь- нод позиции кадраэ шестой вход - с третьим выходом блока коррекции дискретной модели,, седьмой вход - с первым выходом блока синхронизации моделирования работы автооператоров, связанным также с вторым входом блока анализа окончания проверки технологического процесса5 а выход блока дискретной модели гальванической линии связан с четвертьс входом блока анализа конечной позиции кадра и пятым входом блока анализа начальной гюзиции кадра, второй вход блока постоянной памяти кадров связан с выходом счетчика технологических процессов э третий вход - с вторьм выходом счетчика кадров, четвертый вход - с Третьим выходом блока пересьшки кадров,, первый выход блока стоянной памяти кадров связан с третьш-1 входом блока оперативной па-- мяти формирования 1--;аршрута автоопе- ратора, четвертым входом блока пересылки кадров и вторым входом блока выделения синуфонизирующей командь5 кадра, второй выход - с третьих входом регистра начальной позиции кадра и четвертым входом блока анализа начальной позиции кадра; третий - с третьш 1и входами регистра конечной позиции кадра и блока анализа конечной позиций кадра, блок анализа окончания гфозерки технологического процесса связан с четвертым вкодо14 блока пересьшки маршрута автооператораj первьй вход блока оперативной памяти маршрута автооператора связан с вторым выходом блока оперативной памя- ти формирования маршрута автооператора второй вхс5Д - с третьим выходом блока нересьшкЕ маршрута авто- оператора, первый вход блока синхронизации моделирования работы азто- операторов связан с первьй- вьпсодом счетчика кадров второй и третт-ш входы - с первьщ и вторьм выводами блока выделения скнхронизирутощей команды кадра, а второй выход блока синхронизации моделирования работы автооператоров связан с другим входом элемента И вход блока управле НИЛ считыванием команд связан с вторьм выходом блока пересылки маршрута автооператора.
32
15
I
Фце.2
7f
J5
1i
57
3ff9uz,3
20
16
в
7
17
5x4
axf
50
8ь/х5
f5
Вых1
dJ
3f
ВхЗ
51
52
55
Вых2
Вых5
15
И
5
55
57
58
Вы)(1
-
21
5л5
Вх2
55
1
23
И2.6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
