

| название | год | авторы | номер документа |
|---|---|---|---|
| Многопроцессная линия гальванопокрытий | 1990 |
|
SU1770461A1 |
| Система управления многопроцессной линией гальванопокрытий | 1976 |
|
SU653308A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления | 1980 |
|
SU954940A2 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для централизованногопРОгРАММНОгО упРАВлЕНия АВТООпЕРА-ТОРАМи | 1978 |
|
SU815716A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
Изобретение относится к оборудованию для гальванотехники. Цель изобретения - повышение производительности и надежности работы гальванолинии. Линия содержит накопитель 1 подвески 2 с деталями, перестраиваемые кодировщики 3 маршрута и режимов обработки, автооператор 4, гальванические ванны 5, датчики 6 положения автооператора на линии, считывающее устройство 7 датчиков положения автооператора, декодирующее устройство 8 накопителя, моделирующее устройство 9, декодирующее устройство 10 на автооператоре, блок 11 управления автооператором, устройство 12 задания режимов на автооператоре, приемную часть 13 устройства 12 задания режима на гальванических ваннах, локальные устройства 14 управления и контроля режимов ванн, позицию разгрузки накопителя 15. Повышение производительности и надежности работы достигается введением в данную линию перестраиваемых кодировщиков маршрута и режимов обработки, декодирующих устройств накопителя, декодирующего устройства на автооператоре, устройства задания режимов на автооператоре с приемной частью на ваннах, моделирующего устройства. 2 ил.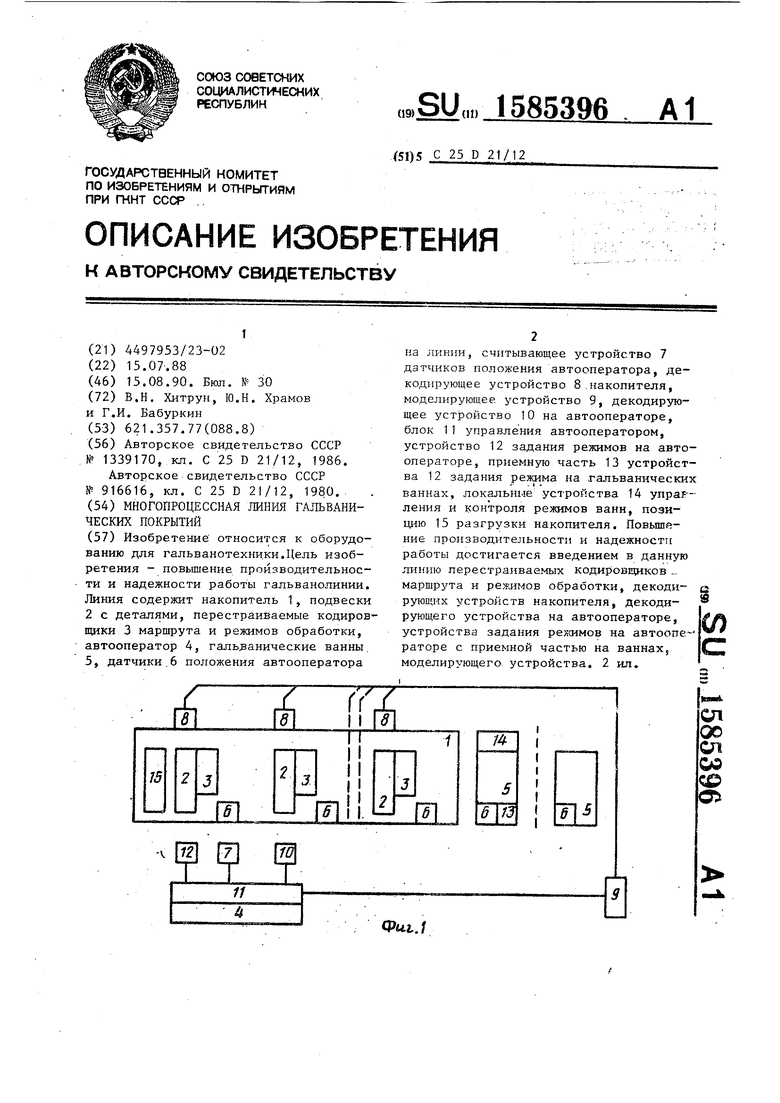
Фиг../
Изобретение откосится к оборудова- ншо для гальванотехники и предназначено для обработки деталей в линиях по нескольким технологическим марщг/- там одновременно при возможности обработки каясдого технологическох- о маршрута по индивидуально зггданной про- без предваритегльного перепро- грамьшрования,
Цель изобретения - повышение производительности и надежности работы гальванической линии.
На фиг« 1 приведена структурная схема многопроцессной линии гальвагш- ческих покрытий; на фиг. 2 структурная схема блока правления авто- оператором.
Линия содержит накопитель 1, подвески 2 с деталями, перестраиваемые кодировщики 3,маршрута и режимов обработки, автооператор 4 гальванические ванны 5, датчики 6.положения автооператора на линии, считывающее устройство 7 датчиков положения азтооператора, декодирующие устройства 8 накопителя, моде л ируюш;ее устройство 9, декодирующее, устройство 10 на авто-операторе, блок 11 управления автооператором, устройство 12 задания ре- жимов на автооператоре с приемной частью 13 на гальванических ваннах,, локальные устройства 14 управления и контроля режимов ванн, позицию 15 разгрузки накопителя
В накопителе 1 на неподвижных основаниях расположены подвески 2 с деталями, на которых закреплены перестраиваемые кодировщики 3 маршрута и регкимов обработки, в один ряд с га гальваническими ваннами 5. Вдоль этого ряда расположены ходовые пути с установленньп-гл на них автооператором (основания и ходовые пути не указаны так как их конструкци не имеют прин ципиального значения). Каждое основание (позиции) накопителя 1 и каж,да.я. гальваническая ванна 5 снабжена датчиками 6 положения автооператора на линии, а соосно с ним на автоопера- торе 4 закреплено считывающее устройство 7 датчиков положения автооператора. На каждой позиции накопителя 1 расположены декодирующие устройства
8 накопителяэ электрически связанные с моделир чощт- устройством 9 и образующие информационную пару с кодировщиками 3., В верхней части автооператора 4 расположена анапогичной конст
5
д 5
5
рукции декодирующее устройство 10 так 5 что при нахождении подвески в верхнем положении на автооператоре оно образует информационную пару с кодировщиком 3. Устройство 10 электрически соединено с блоком 11 управления, закрепленным на автооператоре 4, на котором расположено устройство 12 задания режимов, а на каждой позиции гальванических ванн 5 закреплена приемная часть 13 устройства 12 задания pe iiMOB, которая при позиционировании образует информационную пару с устройством 12,
Моделирующее устройство 9 и блок 1 управления соединены проводной связью с помощью подвижного кабеля, В непосредственной близости от активных гальванических ванн расположены локальные устройства 14 управления и контроля режимов активных ванн. Они соединены через устройства 12 и 13 с блоком 11 управления. Позиция 15 разгрузки накопителя расположена в линии аналог ично позициям накопителя 1 и имеет свой датчик положения автооператора (не показано).
Локальные устройства 14 управления и контроля гальванических ванн представляет собой комплект серийно выпускаемых узлов - агрегата выпрямительного Астра-2м ДЛЛЗ,215,000 и набора датчиков температуры, уровня из автоматической линии для производства печатных плат АГ-44.ГГМ1.2117036.
Блок управления автооператором ; предназначен для осуществления совместной обработки по индивидуальным маршрутам и с индивидуальными релсима- ми всех находящихся.в линии гальванопокрытий подвесок. Блок управления расположен в доступном месте на автооператоре и представляет собой специализированную процессорную систему, дополненную командным устройством (драйвером) для формирования сигналов управления исполнительным механизмом,
Б.ЛОК управления автооператором (фиг, 2) содержит постоянное запоми- нающее устройство (ПЗУ), в котором хранятся все возможные для данной линии (в условиях конкретного производства) маршруты и режимы обработ гси подвесок, оперативно запоминающее устройство (ОЗУ) для хранения текущей информации, устройство управления (УУ), вырабатывающее последовательность микрокоманд, многоканальный таймер (Т)
д)1я отсчета времени вьщержки подвесок в гальванических вггннах, устройство задания режимов для локальных систем управления. ПЗУ выполнено на микросхемах К155 РЕЗ, каждая из которых программируется для одного конкретног технологического маршрута и является сменной. Все платы (узлы) блока управления соединены общей тлиной (ОШ), к которой подсоединяются вькоды считывающих устройств датчиков переменной и позиционирования (ДП), декодирующие устройства (ДУ). Все внешние сигналы, поступающие на ОШ, имеют гальваничес- развязку, 5лок управления имеет автономный источник питания, размещенный также на автооператоре.
Многопроцессная . линия гальванопокрытий работает следующим образом.
Перед началом работы в накопителе 1 в произвольном порядке, обуславливаемом только процессом подготовки, устанавливаются подвески 2, кодировщики 3 которых установлены в соответствии с марпгрутом следования и режима обработки их в ваннах. В дальнейшем поступлею-ш подвесок 2 в накопитель 1 происходит по мере их подготовки с размещением на освободившуюся позицию накопителя 1. Автооператор 4 находится на любой позиции накопителя 1 или у любой гальванической ванны 5, Позиционирование автооператора 4 обеспечивается совпадением датчика 6 положения и считывающего устройства 7. Декодирующее устройство 8 на накопителе 1 расшифровывают кодеровщик 3.и передают его в моделируюп(ее устройст- во 9, которое выбирает, позицию накопителя, к которой направляется автооператор 4. После позиционирования на заданной позиции накопителя t автооператор 4 поднимает подвеску 2 и в верхнем
положении декодирующее устройство 10 автооператора расшифровывает информацию кодировпщка 3,последняя поступает в блок 11 управления 5 где записывается в оперативное запоминающее устройство (ОЗУ),. Данные 035 сравнивают с предварительно записанными в сменные ИС постоянного запоминающего устройства (ПЗУ) данными о возмогсных в линии маршрутах и режимах обработки. Микрокомандное
По окончании выдержки в какой-л бо вапне блок 11 управления вьфабатывает команду, по которой автооператор 4 с любой позиции линии подъезжает к ванне, в которой окончилась вьдержка, поднимает подвеску 2 после вьщержки времени стека1П1я, переносит ее в csie- дую1дую по технологическому маршруту ванпу. После обработки подвески в последующей по технологическому мар- щтуту ванне подвеска 2 забирается автооператором 4 и переносится на позицию 15 разгрузки накопителя для де- мопталса. После этого моделирующее устройство 9 при наличии подвесок.в накопителе 1 анализирует состояние линии и выбирает оптималь-ный для прохожт1,е- Н1-1Я пр.и данной ситуации маршрут. Автооператору 4 вьщаатся сигнал вызова к выбранной позиции накопителя, подвеска им заб.ирается и загружается в линию Для ручного и аварийного управления на ачтооператоре закреплен пульт, соединенный с блоком 11 управления Ин45
50
устройство блока управления вырабаты- се дикаторное табло пульта содержит ин- вает последовательность команд по- формацию о текущем нахождении автосредством которых происходит запись в оператора и номере позиции, к которой регистры и сравнение данных ОУЗ и ПЗУ, ° будет направлен по окончании опе- в результате чего вьграбатывается ко- рации в ванне или вызова.
10
0
5
манда для .управления приводами авто.- оператора 4 и времязадающпми устройствами блока 11 управления, определяется направление движения и номер гальванической ванны, к которой должен в соответствии с маршрутом следовать автоонератор 4, При достижении заданной ванны автооператор 4 опускает в нее подвеску 2, и начинается, отсчет времени для данной подвески. При опускании подвески 2 в активную ванну 5 устройство 12 задания режима вырабатывает числовую последовательность им- 5 пульсов, содержащую информацию о ре- исиме обработки, которая фиксируется приемной частью 13 устройства 12 задания режимов и которая вырабатывает команды, поступающие в локальное устройство 14 управления и контроля ре- ж1-1мами, в котором осуществляется установка и поддержание заданного решша. После этого по команде с моделир тощего устройства 9 автооператор 4 вновь забивает подвеску 2 из накопителя 1 и аналогично описанному переносит ее в заданную ванну линии. Так в гальва- н.ичоскую линию может быть загружено 11 подвесок, обрабатываемых по 1 технологическим маршрутам.
По окончании выдержки в какой-л бо вапне блок 11 управления вьфабатывает команду, по которой автооператор 4 с любой позиции линии подъезжает к ванне, в которой окончилась вьдержка, поднимает подвеску 2 после вьщержки времени стека1П1я, переносит ее в csie- дую1дую по технологическому маршруту ванпу. После обработки подвески в последующей по технологическому мар- щтуту ванне подвеска 2 забирается автооператором 4 и переносится на позицию 15 разгрузки накопителя для де- мопталса. После этого моделирующее устройство 9 при наличии подвесок.в накопителе 1 анализирует состояние линии и выбирает оптималь-ный для прохожт1,е- Н1-1Я пр.и данной ситуации маршрут. Автооператору 4 вьщаатся сигнал вызова к выбранной позиции накопителя, подвеска им заб.ирается и загружается в линию, Для ручного и аварийного управления на ачтооператоре закреплен пульт, соединенный с блоком 11 управления Ин0
5
0
5
0
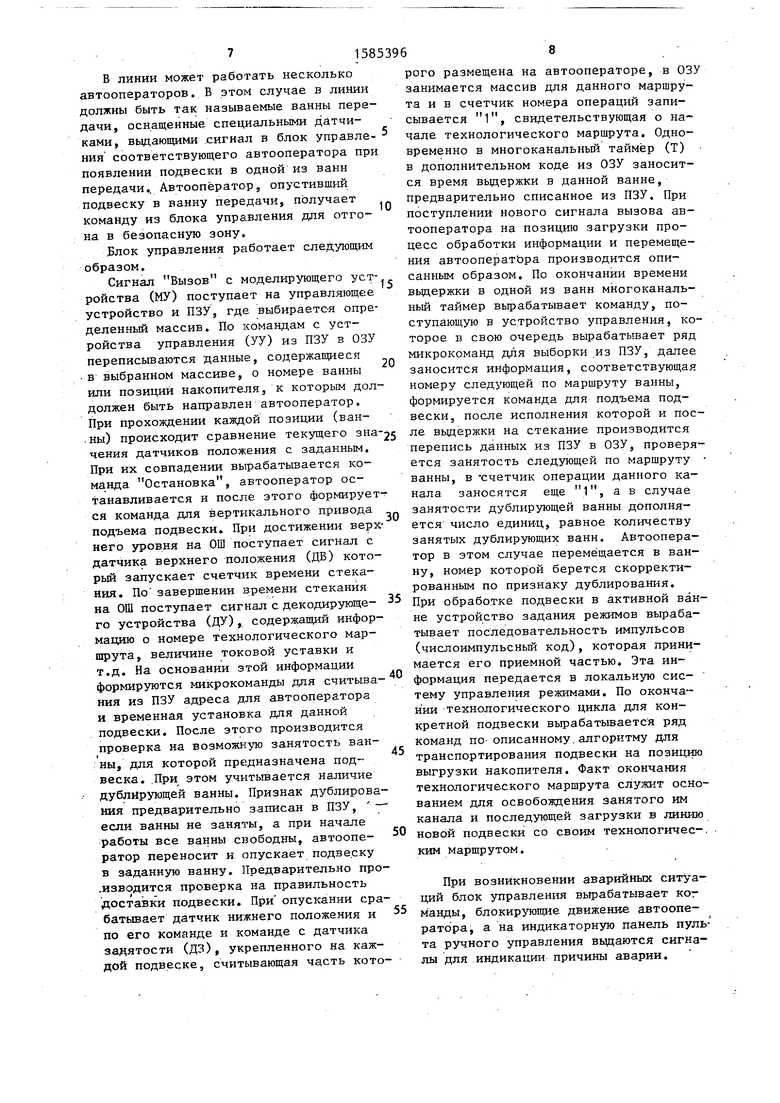
В линии может работать несколько автооператоров. В этом случае в линии должны быть так называемые ванны передачи, оснащенные специальными датчирого размещена на автооператоре, в ОЗУ занимается массив для данного маршрута и в счетчик номера операций записывается 1, свидетельствующая о наДаЧИ ОСг1(±Щс:пП1М iit-u,iWH i -i-iками выдающими .сигнал в блок управле- 5 чале технологического маршрута. Одно .,«,, .г-, irftj-iT-irtT -ntr -tT-tT uunj татдмо г I I 1
ния соответствующего автооператора при появлении подвески в одной из ванн передачи., Автоопёратор, опустивший подвеску в ванну передачи, получает команду из блока управления для отгона в безопасную зону.
Блок управления работает след:дощим образом.
временно в многоканальный таймер (Т) в дополнительном коде из ОЗУ заносится время вьщержки в данной ванне, предварительно списанное из ПЗУ. При поступлении нового сигнала вызова автооператора на позицию загрузки процесс обработки информации и перемещения автооперат&ра производится опиСигнал Вызов с моделирующего уст- санным образом. По окончании времени ,ч „ -,,oT5rtcrtnmc,o пьтрпжки в опной ИЗ ванн многоканаль
ройства (МУ) поступает на управляющее устройство и ПЗУ, где выбирается определенный массив. По командам с устройства управления (УУ) из ПЗУ в ОЗУ переписываются данные, содержащиеся . в выбранном массиве, о номере ванны или позиций накопителя, к которым дол- должен быть направлен автооператор. При прохождении каледой позиции (ванвыдержки в одной из ванн многоканальный таймер вьфабатывает команду, поступающую в устройство управления, ко торое в свою очередь вырабатывает ряд микрокоманд для выборки ,из ПЗУ, далее заносится информация, соответствующая номеру следующей по маршруту ванны, формируется команда для подъема подвески, после исполнения которой и пос
ны) происходит сравнение текущего - - « P-l----r/ :f :; :::
чения датчиков положения с заданным При их совпадении вырабатьшается ко- ма.нда Остановка, автооператор останавливается и после этого формируется команда для вертикального привода подъема подвески. При достижении верхнего уровня на ОШ поступает сигнал с датчика верхнего положения (ДБ) который запускает счетчик времени стека- ния. По завершении времени стекания на ОШ поступает сигнал с декодирующего устройства (ДУ),. содержащий информацию о номере технологического маршрута, величине токовой уставки и
40
45
т.д. На основании этой информации формируются микрокоманды для считыва НИН из ПЗУ адреса для автооператора и временная установка для данной подвески. После этого производится проверка на возможную занятость ван- ны, для которой предназначена подвеска. .При этом учитьгоается наличие дублирующей ванны. Признак дублирования предварительно записан в ПЗУ, т если ванны не заняты, а при начале работы все ванны свободны, автоопе ратор переносит и опускает подве.ску в заданную ванну. Предварительно про- .изводится проверка на правильность доставк и подвески. При опускании срабатывает датчик нижнего положения и по его команде и команде с датчика занятости (ДЗ), укрепленного на каждой подвеске, считывающая часть кото; 50
55
перепись данных из ПЗУ в ОЗУ, проверя ется занятость следующей по маршруту ванны, в -счетчик операции данного канала заносятся еще 1, а в случае занятости дублирующей ванны дополняется число единиц, равное количеству занятых дублирующих ванн. Автооператор в этом случае перемещается в ванну, номер которой берется скорректированным по признаку дублирования. При обработке подвески в активной ван не устройство задания режимов вырабатывает последовательность импульсов (числоимпульсный код), которая принимается его приемной частью. Эта информация передается в локальную систему управления режимами. По оконча- н ии технологического цикла для конкретной подвески вьфабатьшается ряд команд по описанному.алгоритму для транспортирования подвески на позици выгрузки накопителя. Факт окончания технологического маршрута служит осн ванием для освобождения занятого им канала и последующей загрузки в лини новой подвески со своим технологичес КИМ маршрутом.
При возникновении аварийных ситуа ций блок управления вьфабатывает кот манды, блокирующие движение автооператора, а на индикаторную панель пул та ручного управления выдаются сигна лы для индикации причины аварии.
рого размещена на автооператоре, в ОЗУ занимается массив для данного маршрута и в счетчик номера операций записывается 1, свидетельствующая о начале технологического маршрута. Одночале технологического маршрута. Одно.,«,, .г-, irftj-iT-irtT -ntr -tT-tT uunj татдмо г I I 1
временно в многоканальный таймер (Т) в дополнительном коде из ОЗУ заносится время вьщержки в данной ванне, предварительно списанное из ПЗУ. При поступлении нового сигнала вызова автооператора на позицию загрузки процесс обработки информации и перемещения автооперат&ра производится описанным образом. По окончании времени пьтрпжки в опной ИЗ ванн многоканаль
выдержки в одной из ванн многоканальный таймер вьфабатывает команду, поступающую в устройство управления, которое в свою очередь вырабатывает ряд микрокоманд для выборки ,из ПЗУ, далее заносится информация, соответствующая номеру следующей по маршруту ванны, формируется команда для подъема подвески, после исполнения которой и - - « P-l----r/ :f :; :::
40
45
50
55
перепись данных из ПЗУ в ОЗУ, проверяется занятость следующей по маршруту ванны, в -счетчик операции данного канала заносятся еще 1, а в случае занятости дублирующей ванны дополняется число единиц, равное количеству занятых дублирующих ванн. Автооператор в этом случае перемещается в ванну, номер которой берется скорректированным по признаку дублирования. При обработке подвески в активной ванне устройство задания режимов вырабатывает последовательность импульсов (числоимпульсный код), которая принимается его приемной частью. Эта информация передается в локальную систему управления режимами. По оконча- н ии технологического цикла для конкретной подвески вьфабатьшается ряд команд по описанному.алгоритму для транспортирования подвески на позицию выгрузки накопителя. Факт окончания технологического маршрута служит основанием для освобождения занятого им канала и последующей загрузки в линию новой подвески со своим технологичес-, КИМ маршрутом.
При возникновении аварийных ситуаций блок управления вьфабатывает кот манды, блокирующие движение автоопе ратора, а на индикаторную панель пульта ручного управления выдаются сигналы для индикации причины аварии.
Данное изобретение позволяет осуществлять загрузку, линии из накопителя, в котором подвески устанавливаются в произвольном порядке перед началом работы, в отличие от известного, в котором подвески устанавливают в строго заранее запрограммированном порядке и, кроме того, данная линия повышает надежность и эффективность автоматизации производства.
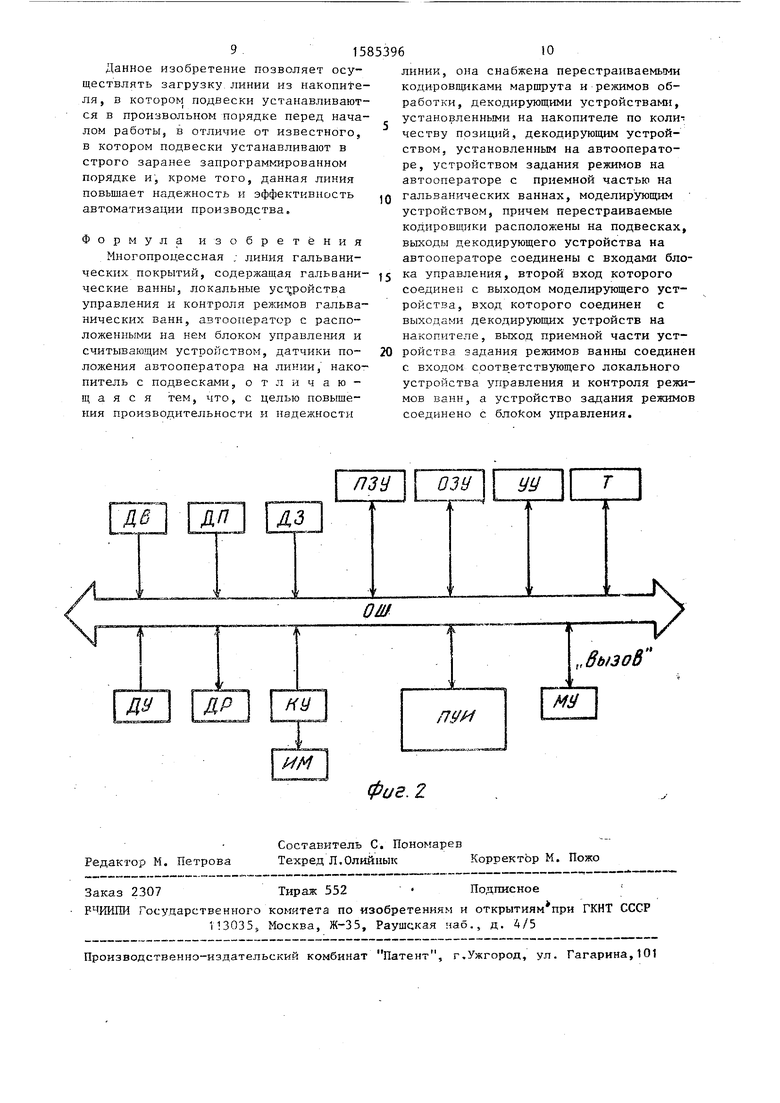
Формула изобретения Многопроцессная ; линия гальванических покрытий, содержащая гальванические ванны, локальные уст;ройства управления и контроля режимов гальванических ванн, автооператор с расположенными на нем блоком управления и считывающим устройством, датчики положения автооператора на линии, накопитель с подвесками, отличающаяся тем, что, с целью повышения производительности и надежности
линии, она снабжена перестраиваемыми кодировш ками маршрута и режимов обработки, декодирующими устройствами, установленными на накопителе по количеству позиций, декодирующим устройством, установленным на автооператоре, устройством задания режимов на автооператоре с приемной частью на гальванических ваннах, моделирующим устройством, причем перестраиваемые кодировщики расположены на подвесках, выходы декодирующего устройства на автооператоре соединены с входами бло- ка управления, второй вход которого соединен с выходом моделирующего устройства, вход которого соединен с выходами декодирующих устройств на накопителе, выход приемной части устройства задания режимов ванны соединен с входом соотв.етствующего локального устройства управления и контроля режимов ванн, а устройство задания режимов соединено с управления.
ош
л
„Вь/зоВ
nf/и
Гм
Фиг. 2
| Устройство программного управления автооператорами гальванической линии | 1986 |
|
SU1339170A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Авторское свидетельство СССР № 916616, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
