Изобретение относится к устройствам для дистанционного управления и может быть использовано в различных отраслях и стационарных устройствах дистанционного управления механизмами, а также для передачи возвратно-поступательного движения и является усовершенствованием известного технического решения по а.с № 920681.
Известное устройство для дистанционного управления (а.с. № 920681), содержащее корпус с крышкой, скрепленные с корпусом направляющую трубу и установленные соосно ей две сопряженные по резьбе детали, причем одна из них, установленная с возможностью вращения относительно общей оси, имеет заплечики для сопряжения с корпусом и соединена с рукояткой, а другая, установленная с возможностью перемещения вдоль оси, имеет выступы, сопряженные с пазами направляющей трубы, и обушок, скрепленный с выходным тросом, при этом в корпусе выполнен карман, охватывающий вращающуюся деталь и частично заполненный смазкой, а между сопряженными по резьбе деталями выполнена замкнутая полость, соединенная с карманом через канал, выполненный во вращающейся детали.
Недостатком данного технического решения является невозможность передачи толкающего усилителя на исполнительный механизм, так как связь осуществляется посредством троса, огибающего блоки; что снижает его эксплуатационные возможности.
Цель изобретения - расширение эксплуатационных возможностей устройства.
Поставленная цель достигается тем, что известное техническое решение по а.с. N 920681 снабжено жестко связанным с направляющей трубой герметичным изогнутым трубопроводом, заполненным передаточной средой, в котором размещены толкатели, направляющие ролики, кольцевой поршень и трос, причем направляющие ролики установлены в угловых элементах трубопровода, а толкатели и кольцевой поршень - в его концах, при этом трос размещен на направляющих роликах и связывает между собой толкатели, один и толкателей жестко связан с обушком ползуна, а второй размещен в кольцевом поршне и подпружинен относительно него.
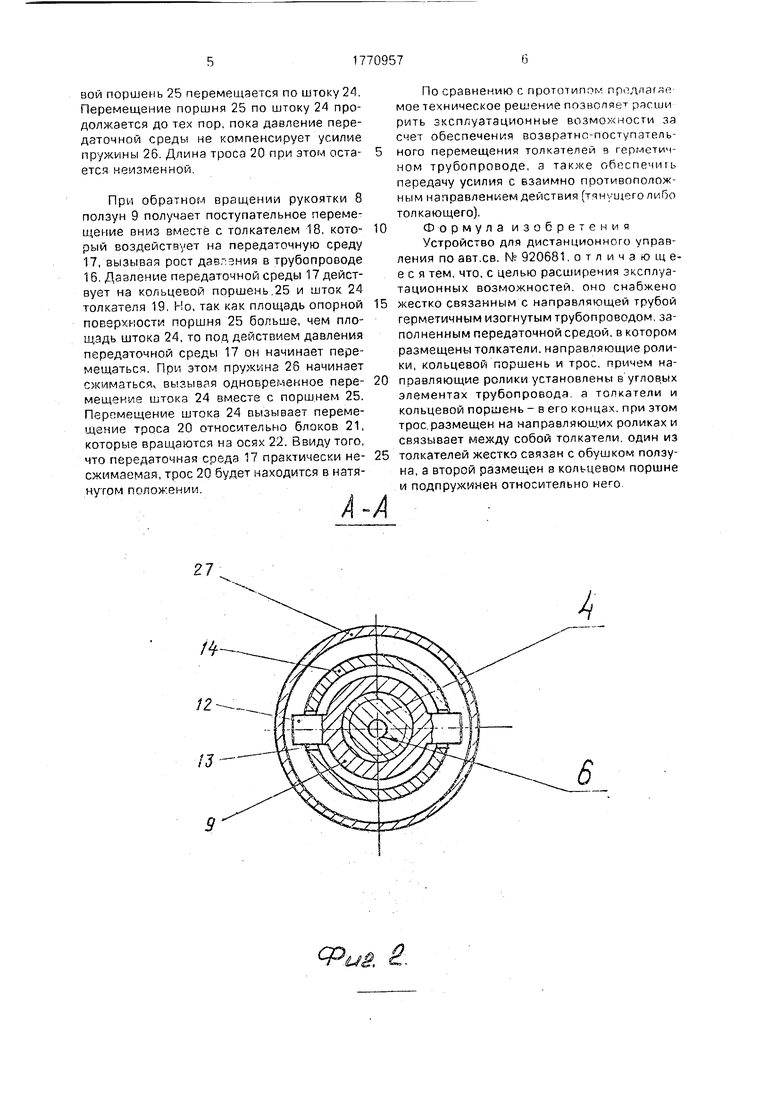
На фиг. 1 изображено устройство для дистанционного управления, общий вид; на фиг.2 - разрез А - А на фиг.1.
Устройство для дистанционного управления содержит корпус 1, выполненный в видечаши с карманомдля смазки, закрытый сверху упорной гайкой-крышкой 3. В корпусе 1 установлена вращающаяся деталь - винт 4 с заплечиком 5 и смазочными каналами 6 и 7. Верхний конец винта 4 соединен с рукояткой 8, а нижний конец соединен с
перемещающейся вдоль него деталью - ползуном 9, выполненным в виде глухой гайки с замкнутой полостью 10 для смазки снабжен обушком 11 Выступы 12 ползуна 9 входят в пазы 13 направляющей трубы 14
0 которая соединена с корпусом. 1 и кронштейном 15 и снабжена фланцем К фланцу направляющей трубы 14 присоединен герметичный трубопровод 16 с передаточной средой 17. В концах трубопровода 16 разме5 щены толкатели 18 и 19, которые соединены между собой гибким тросом 20, огибающим блоки 21. Блоки 21 установлены с возможностью вращения на осях 22 в угловых элементах 23 трубопровода 16 Блоки 21
0 удерживают гибкий трос 20 в центре трубопровода 16 Шток 24 толкателя 19 входит в кольцевой поршень 25 и подпружинен пружиной 26.
Толкатель 18 жестко соединен с обуш5 ком 11 ползуна 9. Для предохранения трущихся деталей от воздействия влаги направляющая труба 14 снабжена кожухом 27. Карман 2 сообщается с атмосферой отверстием 28, которое может бь ть закрыто
0 например, пробкой с сапуном (на ертеже не показано). Винт 4 установлен в подшипнике скольжения 29 запрессованчсм в кбр- пус 1.
Устройство для дистанционного упоэв5 ления работает следующим образом
При вращении рукоятки 8 винт 4 ввинчиваясь в ползун 9, поднимает его При это выступы 12 перемещаются в пазах 13 направляющей трубы 14 и препятствуют вра0 щательному движению ползу на 9 Смазка из полости 10 по каналам 6 и 7 выжимается в карман 2 корпуса 1 и смазывает резьбу винта 4, подшипник 29 и торцы заплечика 5 Воздух из кармана 2 через отверстие 28
5 выходит наружу. Но так как толкатель 18 жестко связан с обушком 11 ползуна 9, то он перемещается вместе с ползуном 9, вызывая перемещение троса 20, который скользит по блокам 21, установленным в угловых
0 элементах 23 герметичного трубопровода 16. При этом шток 24 толкателя 19 получает поступательное перемещение, так ак связан тросом 20 с толкателем 18, сжимая пружину 26. Усилие сжатия пружины 26
5 передается на кольцевой поршень 25, вызывая его одновременное перемещение вместе со штоком 24. Если в этот мсмент в трубопроводе 16 произошла утечка передаточной среды 17, то под действием пружины 26, которая начинает разжиматься кольцевой поршень 25 перемещается по штоку 24. Перемещение поршня 25 по штоку 24 продолжается до тех пор, пока давление передаточной среды не компенсирует усилие пружины 26. Длина троса 20 при этом оста- ется неизменной.
При обратном вращении рукоятки 8 ползун 9 получает поступательное перемещение вниз вместе с толкателем 18, кото- рый воздействует на передаточную среду 17, вызывая рост давг-зния в трубопроводе 16. Давление передаточной среды 17 действует на кольцевой поршень.25 и шток 24 толкателя 19. Но, так как площадь опорной поверхности поршня 25 больше, чем площадь штока 24, то под действием давления передаточной среды 17 он начинает перемещаться. При этом пружина 26 начинает сжиматься, вызывая одновременное пере- мещение штока 24 вместе с поршнем 25. Перемещение штока 24 вызывает перемещение троса 20 относительно блоков 21, которые вращаются на осях 22. Ввиду того, что передаточная среда 17 практически не- сжимаемая, трос 20 будет находится в натянутом положении.
А По сравнению с прототипом продлагя мое техническое решение позволяет рзсши рить эксплуатационные возможности за счет обеспечения возвратно-поступательного перемещения толкателей в герметичном трубопроводе, а также обеспечить передачу усилия с взаимно противоположным направлением действия (тчнущего либо толкающего).
Формула изобретения Устройство для дистанционного управления по авт.св. N 920681, отличающееся тем, что, с целью расширения эксплуатационных возможностей, оно снабжено жестко связанным с направляющей трубой герметичным изогнутым трубопроводом, заполненным передаточной средой, в котором размещены толкатели, направляющие ролики, кольцевой поршень и трос, причем направляющие ролики установлены в угловых элементах трубопровода, а толкатели и кольцевой поршень - в его концах, при этом трос.размещен на направляющих роликах и связывает между собой толкатели, один из толкателей жестко связан с обушком ползуна, а второй размещен в кольцевом поршне и подпружинен относительно него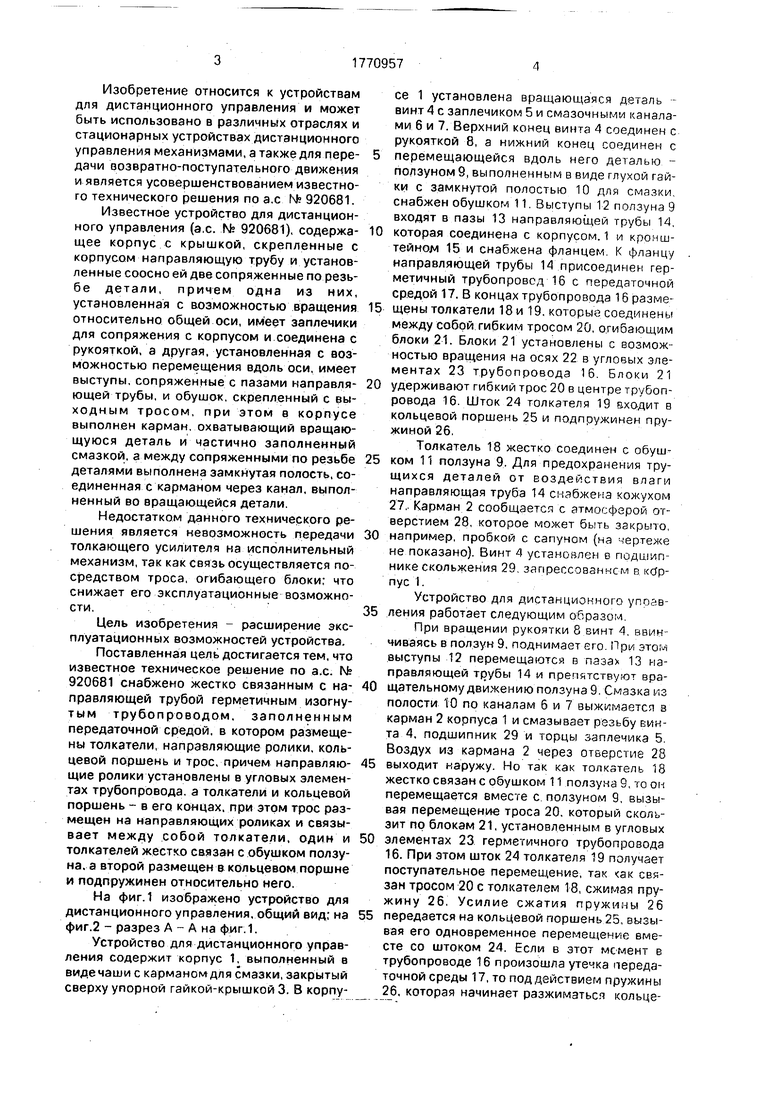
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления | 1979 |
|
SU920681A1 |
| Передаточный механизм | 1983 |
|
SU1116249A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2005 |
|
RU2302576C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| Устройство для импульсной обработкидАВлЕНиЕМ зАгОТОВОК | 1976 |
|
SU797559A3 |
| ГАЗОПРИВОД (ВАРИАНТЫ) | 1992 |
|
RU2067185C1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ И ОТДЕЛЕНИЯ ВСПЛЫВАЮЩЕГО БУЯ С ТРОС-КАБЕЛЕМ НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2008 |
|
RU2373103C1 |
| ПАССАЖИРСКОЕ КРЕСЛО | 2001 |
|
RU2224689C2 |
| Устройство для тренировки пловцов | 1988 |
|
SU1567228A1 |
| Установка для лечения заболеваний позвоночника | 1981 |
|
SU1009460A1 |
Изобретение относится к устройствам для дистанционного управления. Цель изобретения - расширение эксплуатационных возможностей Устройство для дистанционного управления содержит корпус 1, закрытый сверху гайкой-крышкой 3 В корпусе установлен винт 4, верхний конец которого соединен с рукояткой 8, а нижний - с ползуном 9. Направляющая труба 14 жестко связана с трубопроводом 16. в концах которого размещены толкатели 18 и 19, соединенные тросом 20. Трос 20, огибает блоки 21, установленные в угловых элементах 23 трубопровода 16. Толкатель 19 выполнен в виде штока 24, входящего а кольцевой поршень 25 через пружину 26. Устройство позволит обеспечить возвратно-поступательное перемещение толкателей в герметичном трубопроводе, а также передачу усилия с взаимно противоположным направлением действия.2 ил. fe XI 4J О Ю сл VI ю
| Устройство для дистанционного управления | 1979 |
|
SU920681A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
