Фиг.1
действия с ответной поверхностью корпуса 1 и двум натяжными гайками 13 и 14, предназначенными для фиксации опорных гаек 6 и 7 в корпусе 1. При вращении ведущего элемента передачи ролика 2 ролики-сателлиты 4 совершают планетарное движение и
катятся по резьбовой поверхности ролика 2 и неподвижным резьбовым поверхностям гаек б и 7. При обкатывании резьбы ходовой гайки 10 роликами-сателлитами последняя получает перемещение вдоль корпуса 1 передачи. 4 ил.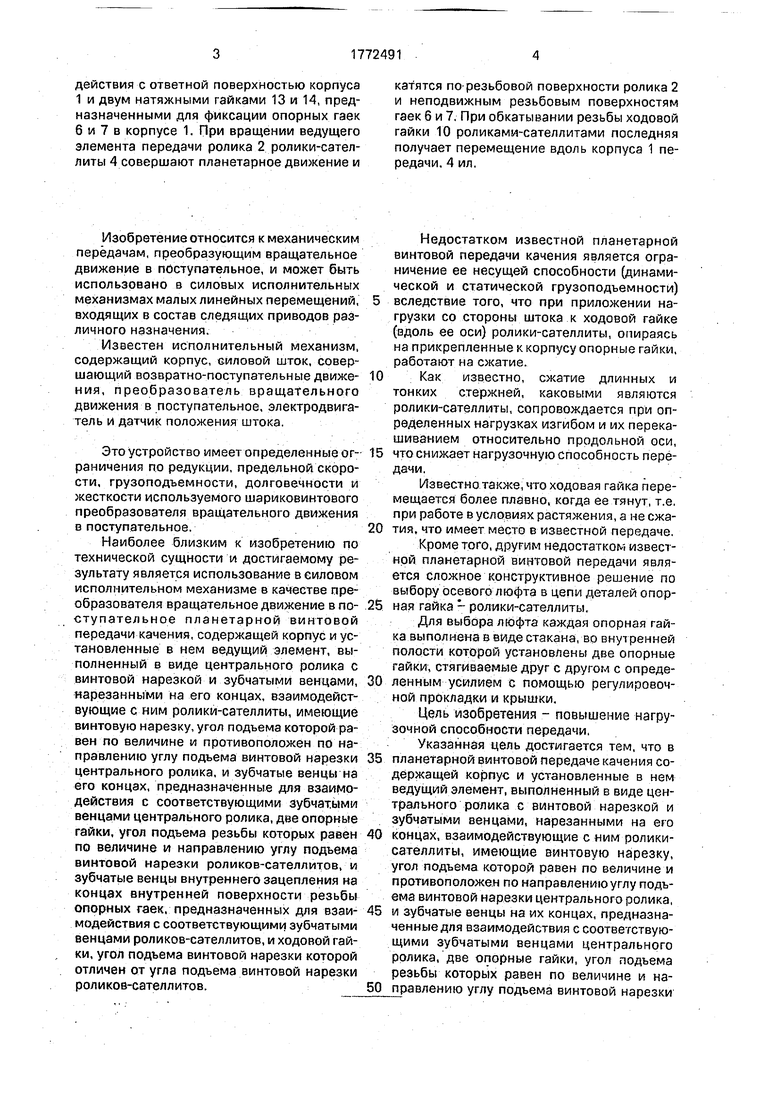
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарная винтовая передача качения | 1976 |
|
SU739289A1 |
| Винтовой механизм | 1989 |
|
SU1747771A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИНТОВОЙ ПРИВОД | 2001 |
|
RU2190791C1 |
| Планетарная винтовая передача | 1989 |
|
SU1728553A1 |
| Редуктор-шарнир | 2017 |
|
RU2663030C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 1999 |
|
RU2162177C2 |
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 1991 |
|
RU2017030C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2012 |
|
RU2522730C2 |
| Шарнир манипулятора | 1984 |
|
SU1294606A1 |
Изобретение относится к машиностроению и может быть использовано в передачах для преобразования вращательного движения в поступательное. Цель изобретения - повышение нагрузочной способности. Для достижения поставленной цели механизм снабжен двумя шайбами 15 и 16, имеющими каждая сферическую опорную поверхность, предназначенную для взаимо19 ю 4 О
Изобретение относится к механическим передачам, преобразующим вращательное движение в поступательное, и может быть использовано в силовых исполнительных механизмах малых линейных перемещений, входящих в состав следящих приводов различного назначения.
Известен исполнительный механизм, содержащий корпус, силовой шток, совершающий возвратно-поступательные движе- ния, преобразователь вращательного движения в поступательное, электродвигатель и датчик положения штока.
Это устройство имеет определенные ограничения по редукции, предельной скорости, грузоподъемности, долговечности и жесткости используемого шариковинтового преобразователя вращательного движения в поступательное.
Наиболее близким к изобретению по технической сущности и достигаемому результату является использование в силовом исполнительном механизме в качестве преобразователя вращательное движение в поступательное планетарной винтовой передачи качения, содержащей корпус и установленные в нем ведущий элемент, выполненный в виде центрального ролика с винтовой нарезкой и зубчатыми венцами, нарезанными на его концах, взаимодействующие с ним ролики-сателлиты, имеющие винтовую нарезку, угол подъема которой равен по величине и противоположен по направлению углу подъема винтовой нарезки центрального ролика, и зубчатые венцы на его концах, предназначенные для взаимодействия с соответствующими зубчатыми венцами центрального ролика, две опорные гайки, угол подъема резьбы которых равен по величине и направлению углу подъема винтовой нарезки роликов-сателлитов, и зубчатые венцы внутреннего зацепления на концах внутренней поверхности резьбы опорных гаек, предназначенных для взаимодействия с соответствующими зубчатыми венцами роликов-сателлитов, и ходовой гайки, угол подъема винтовой нарезки которой отличен от угла подъема винтовой нарезки роликов-сателлитов.
Недостатком известной планетарной винтовой передачи качения является ограничение ее несущей способности (динамической и статической грузоподъемности)
вследствие того, что при приложении нагрузки со стороны штока к ходовой гайке (вдоль ее оси) ролики-сателлиты, опираясь на прикрепленные к корпусу опорные гайки, работают на сжатие.
Как известно, сжатие длинных и тонких стержней, каковыми являются ролики-сателлиты, сопровождается при определенных нагрузках изгибом и их перекашиванием относительно продольной оси,
что снижает нагрузочную способность передачи.
Известно также, что ходовая гайка перемещается более плавно, когда ее тянут, т.е. при работе в условиях растяжения, а не сжатия, что имеет место в известной передаче. Кроме того, другим недостатком известной планетарной винтовой передачи является сложное конструктивное решение по выбору осевого люфта в цепи деталей опорная гайка - ролики-сателлиты.
Для выбора люфта каждая опорная гайка выполнена в виде стакана, во внутренней полости которой установлены две опорные гайки, стягиваемые друг с другом с определенным усилием с помощью регулировочной прокладки и крышки.
Цель изобретения - повышение нагрузочной способности передачи.
Указанная цель достигается тем, что в
планетарной винтовой передаче качения содержащей корпус и установленные в нем ведущий элемент, выполненный в виде центрального ролика с винтовой нарезкой и зубчатыми венцами, нарезанными на его
концах, взаимодействующие с ним ролики- сателлиты, имеющие винтовую нарезку, угол подъема которой равен по величине и противоположен по направлению углу подъема винтовой нарезки центрального ролика,
и зубчатые венцы на их концах, предназначенные для взаимодействия с соответствующими зубчатыми венцами центрального ролика, две опорные гайки, угол подъема резьбы которых равен по величине и направлению углу подъема винтовой нарезки
роликов-сателлитов, и зубчатые венцы внутреннего зацепления на концах внутренней поверхности резьбы опорных гаек, предназначенных для взаимодействия с соответствующими зубчатыми венцами роликов-сателлитов, и ходовой гайки, угол подъема винтовой нарезки которой отличен от угла подъема винтовой нарезки роликов- сателлитов, отличающаяся тем, что на наружной цилиндрической поверхности каждой опорной гайки выполнена резьба, механизм передачи снабжен натяжной гайкой и опорной шайбой, установленных на соответствующей наружной резьбовой поверхности каждой опорной гайки.
Каждая опорная шайба имеет сферическую и плоскую торцовую опорную поверхности, в корпусе выполнены ответные сферические опорные поверхности предназначенные для взаимодействия со сферической опорной поверхностью соответствующей шайбы, а каждая натяжная гайка своим опорным торцом взаимодействует с соответствующей обращенной к ней плоской торцовой опорной поверхностью шайбы.
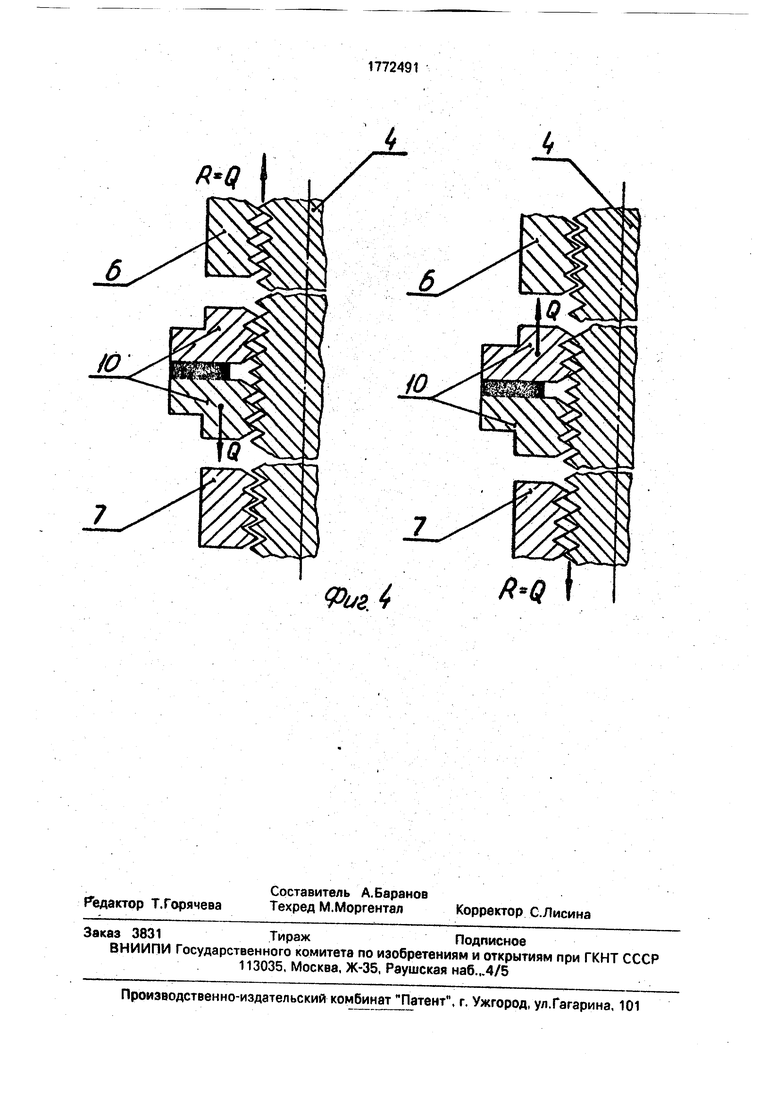
На фиг.1 представлен предлагаемый механизм, продольный разрез; на фиг.2 - сечение А-А на фиг.1; на фиг.З - схема взаимодействия и контактирования резьбовых поверхностей роликов-сателлитов и опорных гаек после затяжки натяжных гаек; на фиг.4- схема взаимодействия и контактирования резьбовых поверхностей роликов-сателлитов и опорных гаек при приложении рабочей нагрузки Q разного направления.
Винтовая передача содержит корпус 1, центральный винтовой ролик 2 и зубчатыми венцами 3, винтовые ролики-сателлиты 4, с зубчатыми венцами 5, опорные гайки 6 и 7 с внутренней многозаходной резьбой для взаимодействия с резьбой роликов-сателлитов и наружной резьбой, зубчатые венцы внутреннего зацепления 8 и 9, ходовую сдвоенную гайку 10 с внутренней резьбой для взаимодействия с резьбой роликов-сателлитов и наружными выступами, взаимодействующими с пазами 11 в корпусе передачи 1 и жестко связанными со штоком передачи 12, натяжные гайки 13 и 14, опорные шайбы 15 и 16 со сферической опорной поверхностью, взаимодействующей со сферической ответной опорной поверхностью корпуса 1 передачи, упоры 17 в штоке передачи, поводок 18 на конце центрального винтового ролика, электродвигатель 19, кинематически связанный с центральным роликом, датчик позиционного положения штока.
Передача работает следующим образом.
При вращении ведущего элемента передачи - центрального винтового ролика 2 от электродвигателя 19 через зубчатую передачу, ролики-сателлиты совершают планетарное движение и катятся по резьбовой поверхности центрального ролика 2, неподвижным многозаходным резьбовым поверх0 ностям опорных гаек 6 и 7, резьбовой поверхности сдвоенной ходовой гайки 10.
Вследствие того, что угол подъема резьбы центрального ролика 2 равен по величине и противоположен по направлению углу
5 подъема роликов-сателлитов 4, а угол подь: ема резьбы роликов-сателлитов равен по величине и направлению углу подъема резьбы опорных гаек б и 7, ролики-сателлиты 4 при своем обкатывании резьбы опорных гаек 6
0 и 7 не перемещаются в осевом направлении относительно центрального ролика 2 и опорных гаек б и 7.
Так как опорные гайки 6 и 7 закреплены в корпусе 1 передачи, а угол подъема резьбы
5 ходовой гайки 10 отличается от угла подъема резьбы роликов-сателлитов, и ходовая гайка 10 зафиксирована от углового перемещения с помощью направляющего устройства, образованного пазами 11 в корпусе 1
0 передачи, то при обкатывании резьбы ходовой гайки 10 роликами-сателлитами, последняя получает осевое перемещение вдоль корпуса 1 передачи.
Шток 12, жестко связанный с ходовой
5 гайкой 10, является выходным звеном передачи и обеспечивает взаимодействие с нагрузкой.
Упоры 17 в момент контакта с поводком 18 являются ограничителями осевого хода
0 штока 12.
Зубчатые венцы 3 (центрального ролика 2), 5 (роликов-сателлитов). 8 и 9 (опорных гаек б и 7) обеспечивают постоянство передаточного отношения и процесс качения ро5 ликов-сателлитов без проскальзывания и перекоса.
Опорные гайки 6 и 7 зафиксированы в осевом направлении относительно корпуса 1 с помощью натяжных гаек 13 и 14, навер0 нутых на наружную резьбу каждой опорной гайки.
Натяжные гайки 13 и 14 обеспечивают указанную фиксацию через опорные шайбы 15 и 16, которые контактируют с корпусом 1
5 своей опорной сферической поверхностью. Наличие промежуточных опорных шайб 15 и 16 со сферической опорком поверхностью между натяжными гайками 13 и 14 и корпусом 1 с ответными сферическими опорными.поверхностями для промежуточных шайб 15 и 16 обеспечивает самоустановку опорных гаек 6 и 7 при затяжке натяжных гаек 13 и 14.
Самоустановка опорных гаек по роликам-сателлитам обеспечивает возможность изменения углового положения опорных гаек относительно оси корпуса 1 и, тем самым, компенсацию технологических погрешностей изготовления самих опорных гаек, корпуса механизма, погрешностей сборочных операций, повышает точность фиксации опорных гаек в отверстии корпуса, и снижает достаточно высокие требования по положению обкатываемой внутренней резьбовой поверхности опорных гаек относительно наружного цилиндрического корпуса каждой опорной гайки служащего технологической базой поверхностью при изготовлении опорных гаек.
Самоустановка обеспечивает также повышение жесткости всей передачи в целом и тем самым повышение ее нагрузочной способности за счет взаимного самоориентирования всех опорных стыков корпуса шайб натяжных гаек при передаче рабочей нагрузки.
Затяжка натяжных гаек 13 и 14 позволяет обеспечить не только фиксацию опорных гаек б и 7 относительно корпуса 1, но и выбрать осевой люфт и создать предварительное растяжение роликов-сателлитов нужной величины в случае необходимости, что повышает нагрузочную способность и жесткость всей передачи в целом и обеспечивает ее надежную работоспособность в составе силовых следящих приводов различного назначения.
Принцип выбора осевого люфта, создание предварительного растяжения, и работа роликов-сателлитов только в условиях растяжения независимо от направления приложения нагрузки к выходному звену штоку 12 механизма иллюстрирует схема на фиг.З и 4, где показаны зоны взаимодействия и контактирования резьбовых поверхностей передачи при усилии Р затяжки от натяжных гаек, реакции R со стороны опорных гаек, приложении рабочей нагрузки Q к ходовой гайке 10.
Работа роликов-сателлитов при приложении рабочей нагрузки к ходовой гайке
различного направления действия только в условиях растяжения позволяет полностью исключить появление изгибных напряжений, имеющих место при работе на сжатие
длинных тонких стержней, каковыми являются ролики-сателлиты.
Таким образом предлагаемое техническое решение позволяет повысить нагрузочную способность механизма, обеспечить
большую его жесткость, высокую плавность и точность позиционирования.
Формула изобретения Планетарная винтовая передача качения, содержащая корпус, установленные в
нем ведущий элемент, выполненный в виде центрального ролика с винтовой нарезкой и зубчатыми венцами, нарезанными на его концах, взаимодействующие с ним ролики- сателлиты, имеющие, винтовую нарезку,
угол подъема которой равен по величине и противоположен по направлению углу подъема винтовой нарезки центрального ролика, и зубчатые венцы на их концах, предназначенные для взаимодействия с соответствующими зубчатыми венцами центрального ролика, две опорные гайки, каждая с углом подъема резвбы, равным по величине и направлению углу подъема винтовой нарезки роликов-сателлитов, и зубчатыми вен-,
цами на внутренней поверхности, предназначенными для взаимодействия с соответствующими зубчатыми венцами роликов-сателлитов, и ведомое звено, выполненное в виде ходовой гайки, угол подъема
винтовой нарезки которой отличен от угла подъема винтовой нарезки роликов-сателлитов, отличающаяся тем, что, с целью повышения нагрузочной способности, на наружной цилиндрической поверхности
каждой опорной гайки выполнена резьба, а механизм снабжен двумя шайбами, установленными на соответствующих резьбах опорных гаек и имеющими каждая сферическую поверхность, в корпусе выполнены ответные поверхности, предназначенные для взаимодействия со сферической поверхностью соответствующей шайбы, и двумя натяжными гайками, установленными на наружных поверхностях соответствующих
опорных гаек и предназначенными для фиксации последних в корпусе.
if
А-А
Фиг. 4
| Винтовая передача | 1981 |
|
SU1145189A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Авторское свидетельство СССР №8739289, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
