Изобретение относится к робототехнике и может использоваться в роботах и манипуляторах, предназначенных для обслуживания различных технологических процессов.
Цель изобретения - уменьшение габаритов и повышение надежности за счет размещения элементов передачи привода поворота звеньев шарнира в каждом звене, при этом передача выполнена в виде планетарного винтового механизма.
На чертеже изображен шарнир манипулятора
W
диняет винт с вилкой 1 и устраняе возможность относительного движен звена 2 вилки . При поджатии гае 5 и 6, а также гаек 7 и 8 друг к гу выбираются люфты во всех резьб вых сопряжениях.
Вместо тормоза для упрощения к струкции и улучшения ее компактно можно вьтолнить резьбовое зацепле гаек 7 и 8 и ролика самотормозящи
Предлагаемое устройство в указ ном варианте выполняет одновремен как функции передачи, так и функц радиально-упорного подшипника и т
Шарнир манипулятора содержит пер- моза. Это улучшает компактность.
,вое звено, выполненное в виде вилки :1, и второе звено 2, а также привод 1ик относительного поворота, включающий в себя двигатель 3 и планетарный винтовой механизм с винтом 4 и гайками 5--8, между которьми расположены резьбовые .ролики 9.
Гайки 5 и 6 смонтированы на вилке 1, гайки 7 и 8 - на звене 2. Гайки 5 и 6 сопряжены с соответствуюпщми участками резьбы резьбовых роликов 9 :которые также сопрягаются с резьбой винта 4. Гайки 7 и 8 сопряжены с выходными участками винтовой нарезки резьбовых роликов 9. Гайки 5 и 6 и гайки 7 и 8 соответственно вьтолнены с одинаковыми по величине и противо- положньзми по знаку углами подъема резьб. Каждая гайка сопрягается с со ответствующим участком ролика, имею щим угол подъема резьбы, равньй по величине и направлению углу подъема резьбы, сопряженной с этим участком гайки. Углы подъема резьб на участ- :Ках винта равны по величине и проти- |воположны по знаку углу подъема резьбы сопряженного участка ролика. Ротор двигателя 3 и ротор тормоза 10
1. Шарнир манипулятора, содержащий два звена, первое из которых вы полнено в виде вилки, охватывающей второе звено, и привод их относительного поворота, включаюпщй в себ двигатель и планетарную передачу, отличающийся тем, что, с целью уменьшения габаритов и повы шения надежности, привод выполнен в виде планетарного винтового механиз ма с резьбовыми роликами, винт кото рого установлен с возможностью вра щения соосно оси поворота звеньев и связан с двигателем, размещенным на первом звене, причем каждый резьбовой ролик выполнен с двумя парами участков разнонаправленной винтовой нарезки и установлен с возможностью взаимодействия участками винтовой
закреплены на винте 4. Передаточное
„ 45 нарезки первой пары с соответствую- отношение передачи винт-гетка с резь- „„,.„.„, „„„«„„„« „„„„, ™.
щими участками винтовой нарезки, вы полненной на винте, а также - с гайками этого винтового механизма, смон тированными соосно оси поворота звебовыми роликами определяется по формуле, аналогичной формуле передаточного отношения зубчатой передачи типа ЗК.
Устройство работает следующим образом.
Двигатель 3 приводит во вращение винт 4. При этом резьбовые ролики- сателлиты совершают планетарное движение и приводят во вращение выходные гай1си 7 и 8 вместе со звеном 2 относительно гаек 5 и 6 вилки 1. При выключении двигателя тормоз 10 сое
диняет винт с вилкой 1 и устраняет возможность относительного движения звена 2 вилки . При поджатии гаек 5 и 6, а также гаек 7 и 8 друг к другу выбираются люфты во всех резьбовых сопряжениях.
Вместо тормоза для упрощения конструкции и улучшения ее компактности можно вьтолнить резьбовое зацепление гаек 7 и 8 и ролика самотормозящим.
Предлагаемое устройство в указанном варианте выполняет одновременно как функции передачи, так и функции радиально-упорного подшипника и тор0
5
0
0
сокращает кинематическую цепь, повышает надежность и точность привода. Вследствие большего диаметра тел качения и большего количества точек контактов грузоподъемность механизма с резьбовыми роликами в несколько раз превьщтает грузоподъемность стандартных подшипников одинаковых радиальных габаритов. Формула изобретения
1. Шарнир манипулятора, содержащий два звена, первое из которых выполнено в виде вилки, охватывающей второе звено, и привод их относительного поворота, включаюпщй в себя двигатель и планетарную передачу, отличающийся тем, что, с целью уменьшения габаритов и повышения надежности, привод выполнен в виде планетарного винтового механизма с резьбовыми роликами, винт которого установлен с возможностью вращения соосно оси поворота звеньев и связан с двигателем, размещенным на первом звене, причем каждый резьбовой ролик выполнен с двумя парами участков разнонаправленной винтовой нарезки и установлен с возможностью взаимодействия участками винтовой
нарезки первой пары с соответствую- „„,.„.„, „„„«„„„« „„„„, ™.
щими участками винтовой нарезки, выполненной на винте, а также - с гайками этого винтового механизма, смонтированными соосно оси поворота звеньев в проущинах вилки первого звена, а участками винтовой нарезки второй пары - с гайками этого винтового механизма, смонтированными соосно оси поворота звеньев во втором звене.
2„ Шарнир поп.1,отличаю- щ н и с я тем, что винтовая нарезка первой и второй пары участков резьбовых роликов вьтолнена с разным числом заходов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Редуктор-шарнир | 2017 |
|
RU2663030C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672154C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
| Ролико-винтовой редуктор | 2020 |
|
RU2731193C1 |
| Инвертированный ролико-винтовой редуктор | 2016 |
|
RU2629481C1 |
| ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ, РОЛИКО-ВИНТОВОЙ РЕДУКТОР, СОДЕРЖАЩИЙ ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ, И СПОСОБ ЕГО СБОРКИ | 2015 |
|
RU2698258C1 |
| Модуль манипулятора | 1986 |
|
SU1423366A1 |
| Планетарная винтовая передача качения | 1976 |
|
SU739289A1 |
| Планетарная винтовая передача качения | 1990 |
|
SU1772491A1 |
| РЕКУПЕРАТИВНЫЙ ТОРМОЗ | 2003 |
|
RU2234011C1 |

Изобретение относится к робототехнике и может применяться в роботах и манипуляторах, предназначенных для обслуживания различных тех-, нологических процессов. Цепь изобретения - повьЕцение надежности прн . обеспечении компактности и технологичности конструкции. Цель изобретения достигается выполнением передачи в шарнире ман1тулятора в виде планетарного винтового механизма с резьбо- роликами, в котором одни гайки, сопряженные с участками резьбовых роликов, встроены в одно звено шарнира, а другие гайки, сопряженные с вьг содны№1 участками резьбовых роликов и имеющие делительный диаметр, отличаю цийся от делительного диаметра первых гаек, встроены в другое звено шарнира. 1 з,п. ф-лы, I ил. (Л С iimi ю со 4 О) о а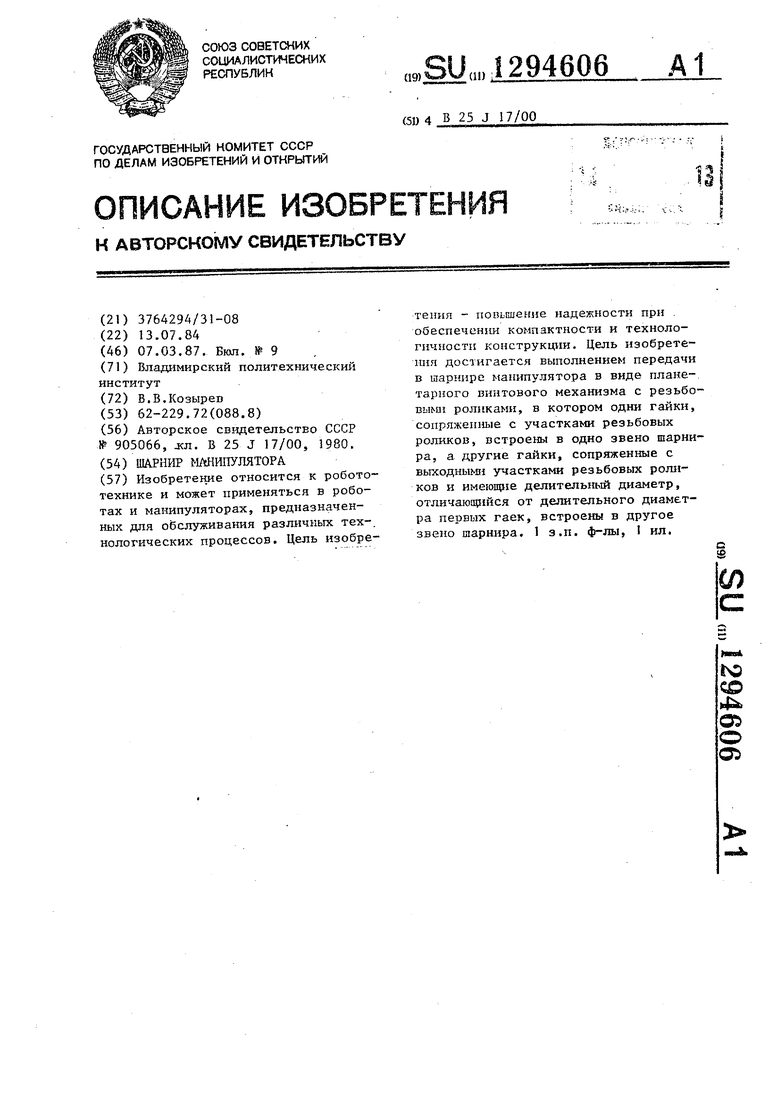
Редактор Н.Тупица
Составитель Е.Ермолаев Техред И.Ходанич
А31/16
Тираж 954Подписное
ВНИИПИ Государственйого комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л.Пилипенкю
| Привод манипулятора | 1980 |
|
SU905066A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
