Изобретение относится к электромеханике и может быть использовано в качестве электропривода широкого класса механизмов, например станков, литейного оборудования, манипуляторов промышленных роботов, транспортной технике и т. п.
Известны электроприводы с внешними магнитными системами, описанные в [1] , в том числе и электромеханические винтовые приводы для робототехники, при этом используются преимущественно приводы с двигателем постоянного тока, якорь которого располагается в зазоре внешней магнитной системы, например цилиндрического, кольцевого, торцевого или линейного типа.
Наиболее близким к заявляемому по совокупности существенных признаков является винтовой привод на базе планетарной передачи с резьбовыми роликами [2] . При вращении ротора гайки с роликами совершают планетарное движение и обкатываются по резьбе винты и гаек, винт при этом совершает поступательное движение.
Недостатком данного привода является увеличенная длина кинематической цепи от ротора двигателя к резьбовым роликам, что усложняет конструкцию, уменьшает надежность.
Изобретение направлено на уменьшение длины кинематической цепи, упрощение конструкции, повышение надежности.
Это достигается тем, что на концах роликов в чередующемся порядке установлены торцевые роторы, а кольцевые внешние орбитальные магнитные системы размещены во внешних зонах торцевых роторов.
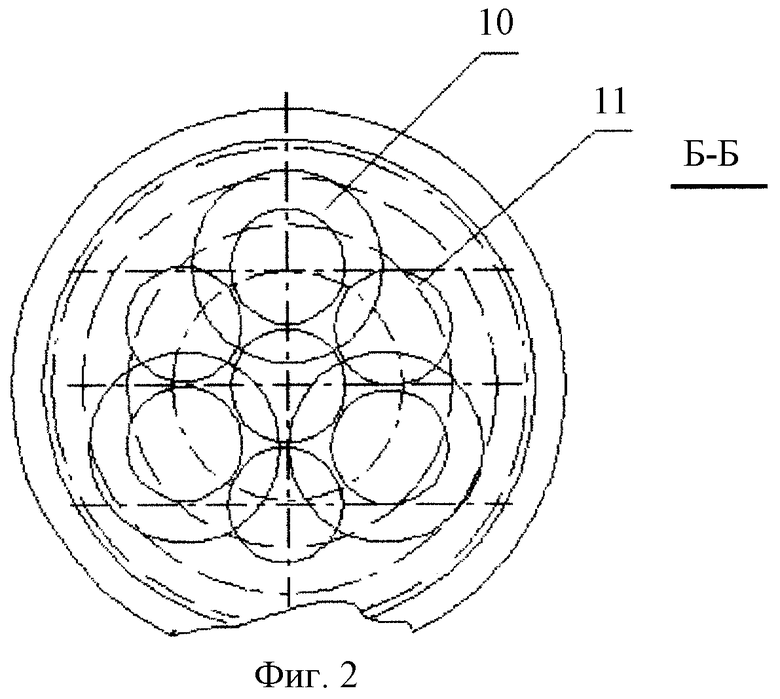
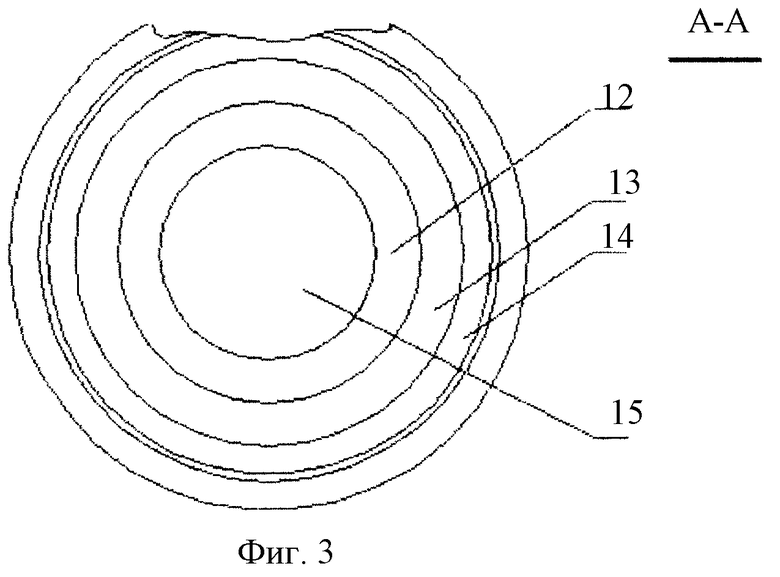
Сущность изобретения иллюстрируется чертежом, где на фиг.1 изображен разрез в вертикально-диаметральной плоскости электромеханического винтового привода, на фиг.2 показан разрез в зоне воздушного зазора, вид на роторы, на фиг.3 показан разрез в зоне воздушного зазора, вид на статора.
Электромеханический винтовой привод включает в себя центральный опорный ролик 1, ролики-сателлиты 2, ходовую гайку 3, корпус 4, зубчатые венцы 5, выполненные на концах роликов-сателлитов 6, в корпусе выполнены ограничительные приливы 7, на торцах роликов-сателлитов установлены торцевые роторы 8, в которых взаимодействуют со статором 9 орбитальной магнитной системы, которая показана совместно с роликами в разрезе в правой части фиг.1. С левого (фиг. 1) конца электромеханического винтового привода установлена аналогичная орбитальная электромеханическая система, которая на фиг.1 условно не показана. На концах роликов-сателлитов в чередующемся порядке установлены торцевые роторы, так, например, на фиг.2 показана внешняя зона 10 торцевого ротора верхнего ролика-сателлита, а смежный с ним ролик 11 имеет внутренние лобовые части 12, активную зону 13 и внешние лобовые части 14. Статоров привод закрыт крышками 15.
При включении статора внешние зоны 10 роторов 8 увлекаются по полю, что приводит к вращению половины (в данном случае трех) роторов, остальные три ротора приводятся во вращение при включении второго статора (левого на фиг. 1). В результате ролики-сателлиты 3 совершают планетарное движение и катятся по резьбовым поверхностям центрального ролика 1 и гайки 3. При этом углы подъема резьбы выполнены таким образом, что центральный ролик не имеет осевого перемещения, а ходовая гайка 3 получает осевое перемещение. В принципе возможно выполнение центрального ролика 1 вообще без резьбы, т.е. цилиндрическим. Зубчатые венцы 5 и коронные колеса 6 обеспечивают качение роликов-сателлитов относительно центрального ролика без проскальзывания.
По сравнению с шариковыми передачами данный привод обеспечивает более высокую редукцию, долговечность, на порядок меньший момент инерции, повышенный ресурс и жесткость передачи в целом.
Источники информации
1. Литвиненко А.М. Электроприводы промышленных роботов с внешними магнитными системами. - Воронеж: Изд-во ВГУ, 1989. - 160 с., ил.
2. А. с. СССР 916828 /В.В. Козырев. Планетарная передача винт - гайка качения/ Опубл. БИ 12, 1982, F 16 Н 25/22, з-ка 2786272/25-28 от 28.06.79.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЧЕРВЯЧНЫЙ ПРИВОД | 2001 |
|
RU2204068C2 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2001 |
|
RU2206954C2 |
| ВОЛНОВОЙ ОРБИТАЛЬНЫЙ ПРИВОД | 2001 |
|
RU2213894C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
Изобретение относится к электромеханическим приводам и предназначено для использования в качестве исполнительного механизма в приводах грузоподъемных механизмов и роботов, в приводах подач станков, в системах управления оперением самолетов и т.п. Электромеханический винтовой привод содержит планетарную передачу с резьбовыми роликами, торцевые роторы и кольцевые внешние орбитальные магнитные системы. На концах роликов в чередующемся порядке установлены торцевые роторы, а кольцевые внешние орбитальные магнитные системы размещены во внешних зонах торцевых роторов. Данный привод обеспечивает более высокую редукцию, долговечность, на порядок меньший момент инерции, повышенный ресурс и жесткость передачи в целом. 3 ил.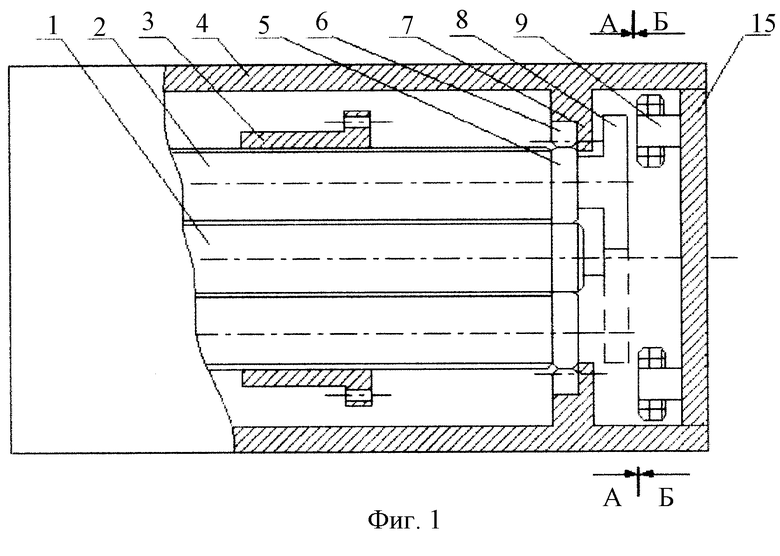
Электромеханический винтовой привод, содержащий планетарную передачу с резьбовыми роликами, торцевые роторы и кольцевые внешние орбитальные магнитные системы, отличающийся тем, что на концах роликов в чередующемся порядке установлены торцевые роторы, а кольцевые внешние орбитальные магнитные системы размещены во внешних зонах торцевых роторов.
| RU 93036440 А, 20.12.1995 | |||
| 1971 |
|
SU416454A1 | |
| Планетарная передача винт-гайка качения | 1979 |
|
SU916828A1 |
| ЛИТВИНЕНКО А.М | |||
| Электроприводы промышленных роботов с внешними магнитными системами | |||
| - Воронеж: Издательство ВГУ, 1989, с.160. | |||

