фиг. 1
Изобретение относится к области взвешивания транспортных средств, в частности к определению веса летательных аппаратов.
Известно устройство для взвешивания летательных аппаратов, содержащее две балки с горизонтальной продольной осью, работающие на изгиб в вертикальной плоскости с наклеенными тензорезисторами, основание и крышку, соединенные между собой специальными элементами (1).
Недостатком данного устройства является значительная погрешность в определении измеряемого пес а, так как весоизмерительная система расчитана на работу в широком диапазоне нагрузок и имеет шкалу, растянутую на весь измеряемый диапазон. Это приводит к тому, что относительная погрешность измеряемой величины лежит в пределах 1,..2%.
Наиболее близким к изобретению является устройство для определения оеса лета- тельных аппаратов, содержащее основание,закрепленные на нем с зазором основную и снабженную тензодатчиком дополнительную балочку,
Недостатком этого устройства является недостаточная точность измерения веса за счет дрейфа пулей, т.е. ухода начальных значений показаний.
Цель изобретения - повышение точности.
Поставленная цель достигается тем, что в устройство для определения веса летательных аппаратов, содержащем основание, закрепленные на нем с зазором основную и снабженную тензодатчиком дополнительную балочки, введены узел управления, дополнительный тензодатчглк, расположенный на основной балочке, и установленный на основании электромагнит, сердечник которого шарнирно связан со свободным концом дополнительной балоч- ки, п обмотка и дополнительный тензодат- чик подключены к узлу управления, причем, величина зазора на 5-10% больше максимального прогиба основной балочки..
На фиг.1 представлена конструкция устройства; на фиг.2 - блок-схема узла управления; на фиг. зависимость для определения оеса.
Устройство для определения оеса летательных аппаратов содержит основание 1 на котором жестко закреплены основная 2 и дополнительная 3 балочки. Платформа 4 соединена с основной балочкой 2 с помощью специальных шаровых опор 5. На дополнительной балочке 3 имеется плоская контактная площадка 6. Зазор д между основной и дополнительной балочками устанавливается с помощью регулировочного винта 7. В месте контакта винта с балочкой на винте расположен шарик. Свободный конец дополнительной балочки 3 в месте расположения контактной площадки 6 посредством шарнира 9 связан с сердечником электромагнита 8, корпус которого жестко закреплен на основании 1. На основной и дополнительной балочках наклеены тензодатчики 10 и 11. Узел управления включает в себя управляющую ЭВМ 12, в управляющую цепь которой подключены обмотки электромагнитов 8 (как правило при взвешивании летательного аппарата
используется минимум три отдельных датчика), коммутатор 13 и усилитель 14, на вход которого подключены тензодатчики 10, соединенные в полумосты.
Устройство для определения веса летательных аппаратов работает следующим образом.
При нагружении платформы 4 сила через шаровые опоры 5 передается на основную балочку 2. При этом происходит ее прогиб. Величина прогиба, пропорциональпая действующей на нее нагрузке, регистрируется с помощью тензодатчиков 11. Когда нагрузка нч балочку 2 достигает более 70% от максимальной, что фиксируется по показаниям, снимаемым с тензодатчика 11, по
команде с ЭВМ 12 происходит поочередное включение в соответствии с программой электромагнитов 8, которые прижимают дополнительную балочку 3 к упору. Напряжение с тензодатчиков 10, пропорциональное
деформации балочки 3, усиливается усилителем 13 и через коммутатор 14 передается в ЭВМ 12. При этом в соответствии с программой происходит перед каждым включением электромагнитов 8 снятие нулей с
каждого полумоста тензодатчиков 10. Длина и толщина дополнительной балочки 3 подбирается таким образом, чтобы ее чувствительность была в 2,5-3 раза больше основной.
Определение веса с помощью основной
балочки производят из зависимости (фиг.2): Р К01,
где К0 - градуировочиый коэффициент основной балочки.
Определение веса с помощью дополнительной балочки определяют из зависимости: Р Ро- Kg А1доп.,
где Ро вес, при котором показания дополнительной балочки равны 0.
Ро определяется путем градуировок и
составляет (1,05-1,1)Р,
Kg - градуировочный коэффициент дополнительной балочки.
доп I - о - f/азнссть показаний, получаемой с тензодатчиков, получаемых до lo и после I включения электромагнитов 8,
Изобретение позволяете высокой точностью определять вес летательного аппарата,
Формула изобретения
Устройство для определения веса летательных аппаратов, содержащее основание, закрепленные на нем с зазором основную и снабженную тензодатчиком дополнительную балочки, отличающееся
тем, что, с целью повышения точности, в него введены узел управпения, дополнительный тензодатчик, расположенный на основной балочке, и установленный на основании электромагнит, сердечник которого шарнирно связан со свободным концом дополнительной балочки, а обмотка и дополнительный тензодатчик подключены к узлу управления, причем зазор на 5-10% больше максимального прогиба основной балочки.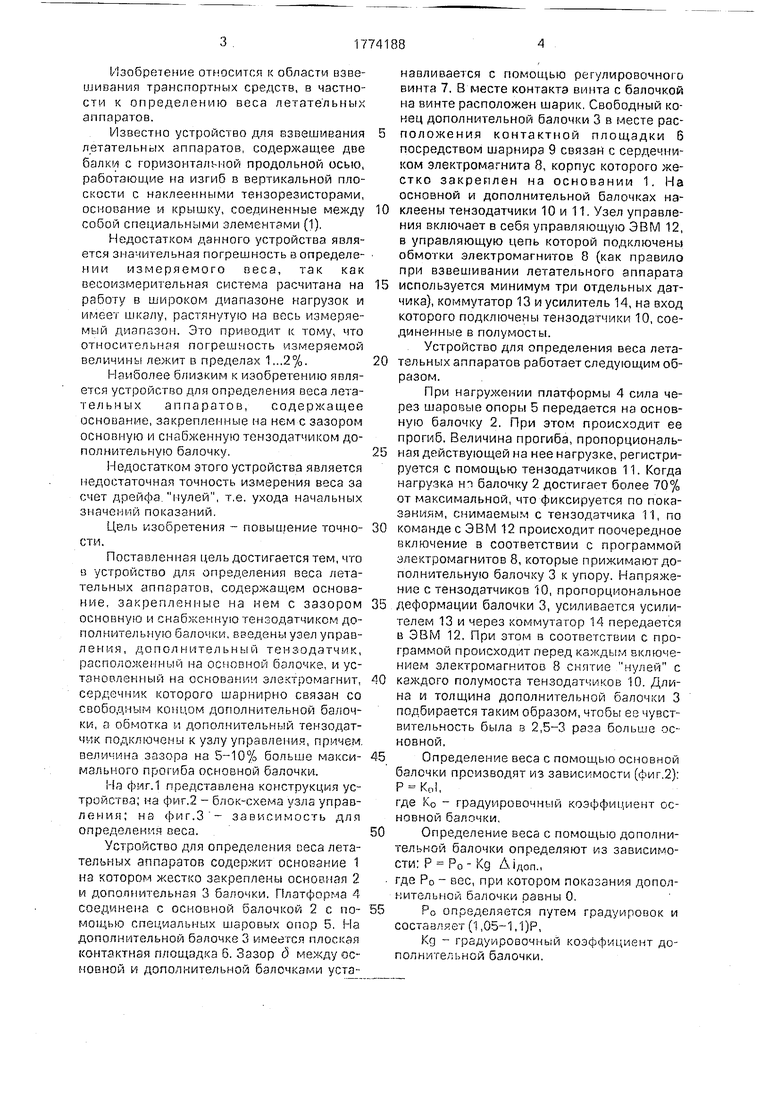

| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ АЭРОДИНАМИЧЕСКИХ ИСПЫТАНИЙ СВЕРХЛЕГКИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2092804C1 |
| Способ контроля неравномерности воздушного зазора электрической машины | 1985 |
|
SU1308958A1 |
| Погрузчик контейнеризированных грузов | 1988 |
|
SU1614973A1 |
| СПОСОБ ЗАДЕРЖКИ РОСТА УСТАЛОСТНЫХ ТРЕЩИН В КОНСТРУКЦИЯХ | 1985 |
|
RU1343689C |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| СИСТЕМА УПРАВЛЕНИЯ УБОРКОЙ МЕХАНИЗАЦИИ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2072312C1 |
| Устройство для определения аэродинамического качества летательного аппарата | 1972 |
|
SU498525A1 |
| Трап | 1990 |
|
SU1804421A3 |
| Способ определения эквивалентного коэффициента интенсивности напряжений металлических конструкций | 1987 |
|
SU1612238A1 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
Использование: взвешивание транспортных средств. Сущность изобретения: при нагружении платформы (4) прогибается основная балочка (2). При достижении нагрузкой величины, равной 70% от максимальной нагрузки и регистрируемой дополнительным тензодатчиком (11), по команде узла управления включается установленный на основании электромагнит 8 и сердечник, шарнирно связанный со свободным концом дополнительной балочки, прижимает ее к расположенной с зазором основной балоч- ке (2). Величина зазора на 5-10% больше максимального прогиба основной балочки. Деформация дополнительной балочки фиксируется расположенным на ней тензодатчиком (10). 3 ил,
/770Х
| Патент США № 4650016, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ВСЕСОЮЗНАЯ nATFH7lin-TFY[-!U4H!iimБИБЛИОТЕКА | 0 |
|
SU310123A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
