Изобретение относится к элементам системы ориентации и навигации, может быть использовано для увеличения точности непрерывного измерения линейных ускорений летательных аппаратов и является усовершенствованием изображения по авторскому свидетельству N: 838588.
Способ измерения ускорения по авторскому свидетельству № 838588 заключается в возбуждении поперечных автоколебаний струн акселерометра с изменением пространственной ориентации струн по отношению к измеряемой компоненте входного сигнала разворотом корпуса на угол л относительно оси, ортогональной оси чувствительности, регистрации для каждого положения корпуса разности частот автоколебаний струн и формировании выходного сигнала по алгебраической сумме результатов измерений в последовательные интервалы времени.
Недостатком данного способа является ограниченная точность измерения ускорения. Это обусловлено следующим фактором. За время переориентации чувствительного элемента (ЧЭ) акселерометра и завершения процессов в нем, акселерометр не измеряет ускорение. Поэтому интерполирование предыдущих и последующих результатов измерений в моменты отсутствия измерений (утраты информационных данных) приводит к значительным погрешностям.
Увеличение скорости разворота ЧЭ, с целью сокращения интервала времени, в течение которого отсутствует измерение ускорения, может привести к его выходу из строя, за счет силы инерции, действующей на конструкцию.
Арретирование инерционной массы ЧЭ в момент разворота снижает точность измерения, т.к. приводит к дополнительным погрешностям за счет введения в конструкцию арретира.
Уменьшение времени на завершение переходных процессов связано со сложностью разработки контуров автогенераторов с малым временем переходных процессов.
w
ё
V|
2
fO
Os
XI
Целью данного изобретения является повышение точности измерения ускорения.
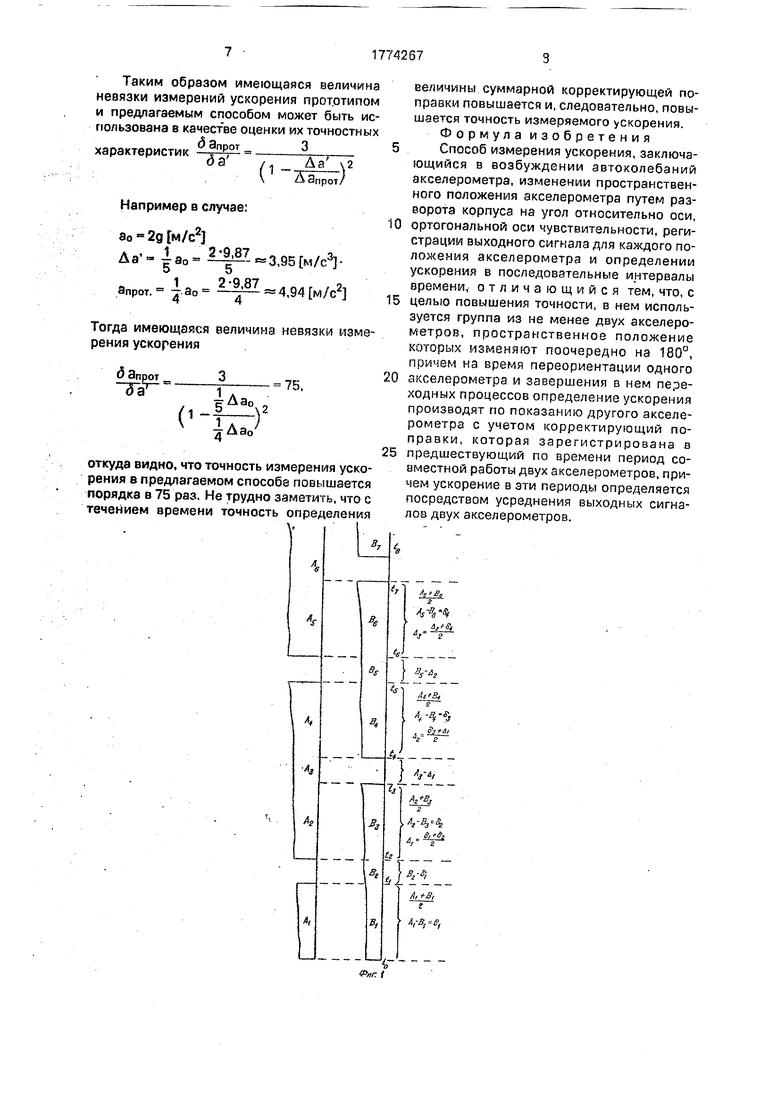
Указанная цель достигается тем, что введена дополнительная группа ЧЭ, ускорение измеряют по показаниям группы ЧЭ (например, двух), пространственное положение которых изменяют поочередно на 180°, причем на время переориентации первого ЧЭ и завершения в нем переходных процессов, его информация при измере- ним ускорения не используется, ускорение измеряют вторым ЧЭ. После переориентации первого ЧЭ производят переориентацию второго ЧЭ, а ускорение измеряют первым ЧЭ с учетом корректирующей по- правки, которая с течением времени непрерывно уточняется согласно заданной циклограмме, кроме того в периоды совместной работы ЧЭ ускорение определяют посредством усреднения результатов измерений двух ЧЭ. Сущность предлагаемого способа поясняется фиг. 1, на которой показана циклограмма работы ЧЭ, а также порядок вычисления ускорения и величин корректирующих поправок на различных интервалах времени.
В предложенном способе измерение ускорения и величин корректирующих поправок осуществляется в двух режимах. В первом режиме вычисляют величину уско- рения и величину корректирующей поправки по сигналам с двух акселерометров на интервалах времени {to, ti}, {ta, ts}, {t4, ts} и т.д. Во втором режиме определяют величину ускорения по сигналу с одного ЧЭ и кор- ректирующую поправку на интервалах времени {ti, ta}, {t3, и}, {ts. te} и т.д.
В первом режиме на интервале {to, ti} измеряют ускорение Ai и Bi и вычисляют
Ai 4-BiЛ ,
величину г, где AI и Bi сигналы о
величине ускорения с первого и второго ЧЭ соответственно. Величина корректирующей поправки вычисляется как
5i Ai-Bi.
На интервале времени {TI, ta}, в момент разворота первого ЧЭ и завершения переходных процессов в контурах автогенераторов, измерения производят во втором режиме. Величину ускорения на этом интервале времени определяют по сигналу от второго ЧЭ и вводят корректирующую поправку 5i, вычисленную на интервале {to, ti}. Величину ускорения определяют как В2 - 5i.
На интервале времени {t2, tj}, после завершения разворота первого ЧЭ, измерение ускорения производят в первом режиме
по сигналам Аа и Вз с двух ЧЭ. Вычисляют величину ускорения
Ai +Bi
а также корректирующую поправку 5i A%- - Вз и суммарное значение корректирующей поправки
Л дL±д Ai2.
На интервале времени {ts, tn} производят разворот второго ЧЭ. Определение величины ускорения осуществляют по сигналу с первого ЧЭ. Величину корректирующей поправки, вычисленную на интервале {ta, 13}, берут равной А1, а ускорение определяют как АЗ AL
На интервале времени {t4, ts}, после завершения разворота второго ЧЭ, измерение ускорения производят в первом режиме по сигналам А4 и В с двух ЧЭ. Вычисляют величину ускорения
А4 -В4
корректирующую поправку дз Аз - В4 и ее суммарную величину
.
На интервале времени {ts, te} производят разворот первого ЧЭ и процесс измерения и определения ускорения повторяется.
На фиг. 2 представлена функциональная схема устройства, реализующая данный способ. Здесь 1,2,3 - арифметические устройства, которые могут быть выполнены как указано в (2) с, 35Ь; 4 - запоминающее устройство, которое может быть выполнено как указано в (2) с. 59; 5,6,7,8,9 - электронные ключи, которые могут быть выполнены как указано в (2) с. 48; 10 - генератор тактовых сигналов (ГТС), который может быть выполнен как указано в (2) с, 395.
Устройство, реализующее предлагаемый способ работает следующим образом.
На интервале времени {to, ti} измерения производят оба ЧЭ, сигналы с которых поступают на арифметические устройства 1 и 3 для вычисления, соответственно значений
А1 +В1г, А ,
пи Ач - Bi 01 (контур измерения
работает в первом режиме). Затем значеAi+Biниячерезэлектронныиключб.при
подаче на него соответствующего сигнала с ГТС, поступает на вход системы управления. Величина корректирующей поправки 5 через электронный ключ 7, при подаче на него соответствующего сигнала с ГТС 10, записывается в запоминающее устройство (ЗУ) 4. На интервале времени {ti, 12} по сигналу с ГТС 10 производят разворот первого 10 ЧЭ (контур измерения начинает работать во втором режиме). с
Сигнал об ускорении со второго ЧЭ поступает на вход арифметического устройства 3, где вычисляется величина В2 - д и 15 передается в СУ через электронный ключ 6. Величина корректирующей поправки (3i поступает на вход арифметического устройства 3 через электронный ключ 8 с ЗУ 4.
На интервале времени {t2,ts} измерения 20 производят оба ЧЭ (контур измерения работает в первом режиме), сигналы с которых поступают на арифметические устройства 1 и 3 для вычисления соответственно значе. А2 + В3 .
НИИ И А2
Вз дг. Затем сигнал
ускорения
через электронный ключ 9 поступает в арифметическое устройство 2, где вычисляется суммарное значение корректирующей поправки30
Al-fe+di
и записывается в ЗУ 4. Сигнал о величине
А2 + Вз35
- с арифметического устройства 1 через электронный ключ 5 поступает в систему управления.
На интервале времени {t3, t4} по сигналу с ГТС 10 производят разворот второго ЧЭ (контур измерения начинает работать во втором режиме), Сигнал об ускорении с первого ЧЭ поступает на вход арифметического устройства 3, где вычисляется величина Аз - AI и через электронный ключ 6 передается в систему управления.
Величина корректирующей поправки А1 поступает на вход арифметического устройства 3 через электронный ключ 8 с ЗУ 4.
На интервале времени {t4, ts} заверша- ют разворот второго ЧЭ и измерения производят оба ЧЭ. Контур измерения начинает работать в первом режиме и процесс измерения ускорения и определения корректирующей поправки повторяется. Для иллюстрации достижения цели изобретения проверяем оценку точности измерения ускорения изложенного в прототипе способа и предлагаемого способа.
5 0
5
0
5
Пусть процесс ускорения (летательного аппарата) a(t) имеет вид, представленный на фиг. 3. В прототипе ускорение a(t) измеряют на интервалах времени {0, ti}. {t2. t3. ... и т.д., отсутствие измерений в интервалах времени {ti, t2, {ta, м},... и т д. обусловлено переориентацией ЧЭ.
Оценим точность измерения ускорения двумя способами на интервале времени {ti. 12}, приняв, что на этом интервале времени a(t) изменяется, например, по гармоническому закону. Тогда
а(т)йрот. а0 + Дапротх xcos .(t-ti), м/с2.
где Зо - среднее значение измеряемой величины a(t);
А апрот. - амплитуда вариации ускорения относительно среднего значения а0, принятая в способе на интервале времени {ti, t2}.
Погрешность измерения ускорения в случае прототипа на интервале {ti, 12} может быть определена как
5аПрот / {(а0+ Аапрот. х
х cos
ч 2п
12 -t1
(t - ti)) - (a0 +
+ Аапрот.)}2 dt А а2прот. (t - ti),
В предложенном способе измерение ускорение a(t) производится и на интервале времени {ti, 1.2}, тогда величина измеряемого ускорения на этом интервале будет определяться как
a (t) a0+ Aa cosf
In t2-ti
(t-ti),M/c2,
где Да1 - амплитуда вариации измеряемого ускорения относительно среднего значения ао в предлагаемом способе на интервале времени {ti, 12}.
Погрешность измерения ускорения в предлагаемом способе на интервале {ti, 12} может быть определена как
да / {(а0+ Аапротх
ч
(1-Ч)- - (а0 + A a cos(t2-ti))}2 dt (АаПГот -Да )2 2
(t2-ti).
Таким образом имеющаяся величина невязки измерений ускорения прототипом и предлагаемым способом может быть использована в качестве оценки их точностных
О Эпоот3
характеристик v
Например в случае:
а0 - 2д м/с2
А а - | ао - 3,95 м/с3 5b
апрот. - | а0 - Р - 4,94 м/с2
Тогда имеющаяся величина невязки измерения ускорения
5ап
3а
т,
75,
откуда видно, что точность измерения ускорения в предлагаемом способе повышается порядка в 75 раз. Не трудно заметить, что с течением времени точность определения
v
0
5
0
5
величины суммарной корректирующей поправки повышается и, следовательно, повышается точность измеряемого ускорения. Формула изобретения Способ измерения ускорения, заключающийся в возбуждении автоколебаний акселерометра, изменении пространственного положения акселерометра путем разворота корпуса на угол относительно оси, ортогональной оси чувствительности, регистрации выходного сигнала для каждого положения акселерометра и определении ускорения в последовательные интервалы времени, отличающийся тем, что, с целью повышения точности, в нем используется группа из не менее двух акселерометров, пространственное положение которых изменяют поочередно на 180°, причем на время переориентации одного акселерометра и завершения в нем переходных процессов определение ускорения производят по показанию другого акселерометра с учетом корректирующий поправки, которая зарегистрирована в предшествующий по времени период совместной работы двух акселерометров, причем ускорение в эти периоды определяется посредством усреднения выходных сигналов двух акселерометров.


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
| Устройство управления динамическим объектом с присоединенным упругим элементом | 1989 |
|
SU1767477A1 |
| Способ измерения ускорения | 1979 |
|
SU838588A1 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2015 |
|
RU2584400C1 |
| Устройство для измерения временного интервала | 1990 |
|
SU1793426A1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ | 2008 |
|
RU2366961C1 |
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2001 |
|
RU2208797C1 |

Изобретение относится к элементам системы ориентации и навигации и может быть использовано для увеличения точности непрерывного измерения линейных ускорений летательных аппаратов. Способ измерения ускорения заключается в том, что ускорение измеряют по показаниям группы ЧЭ (например, двух) пространственное положение которых изменяют поочередно на 180о, причем на время переориентации одного ЧЭ и завершения переходных процессов в нем его сигнал при измерении ускорения не используют, ускорение измеряют другим ЧЭ, после переориентации первого ЧЭ производят переориентацию второго ЧЭ, а ускорение измеряют первым ЧЭ с учетом корректирующей поправки, кроме того, в периоды совместной работы ЧЭ ускорение определяют посредством усреднения результатов измерения двух ЧЭ. 3 ил.
Ь
Wffj
А,-В,Фиг. I
(
Фиг.Ј
Фиг.З
Составитель А. Саблин Редактор С. КулаковаТехред М.МоргенталКорректор Н. Слободяник
Заказ 3924ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035. Москва. Ж-35, Раушская наб.. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
| Способ измерения ускорения | 1979 |
|
SU838588A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
