Предлагаемое изобретение относится к способам определения угловой ориентации снаряда, основанным на измерении угловой скорости снаряда бесплатформенной инерциальной навигационной системой, установленной на вращающемся по крену снаряде. Измерение угловой скорости вращения снаряда осуществляется в проекциях на взаимно ортогональные оси связанной со снарядом вращающейся по крену системы координат, причем одна из осей инерциальной навигационной системы коллинеарна оси вращения снаряда по крену. Измерение угловой скорости вращения снаряда осуществляется МЕМС-датчиками - микромеханическими датчиками угловой скорости (ДУС). Изобретение может быть использовано для определения углов крена, тангажа и рыскания снаряда на баллистическом участке траектории.
Перед запуском снаряда (например, артиллерийского) имеется достаточно навигационной информации, чтобы выполнить выставку инерциальной навигационной системы. Запуск снаряда характеризуется высокими перегрузками. Во время запуска большинство навигационных систем не функционирует, поэтому после запуска необходимо выполнить выставку навигационной системы, в частности угла крена. Кроме того, при определении крена в бесплатформенных инерциальных навигационных системах MEMS-датчиками показания датчиков необходимо корректировать вследствие наличия их уходов, составляющих 0.05-0.1% и не обеспечивающих требуемой точности определения угла крена на вращающихся по крену снарядах.
Известен способ определения угла крена вращающихся по крену снарядов (патент США US 7395987), использующий фазу синусоидальной угловой скорости, измеряемой инерциальными датчиками (ДУС или акселерометрами), расположенными в плоскости, перпендикулярной оси вращения снаряда по крену. Коллинеарно оси вращения снаряда по крену установлен ДУС крена (ДУСх), измеряющий угловую скорость вращения снаряда по крену. Определение угла крена снаряда осуществляется интегрированием сигнала ДУСх, причем фаза крена корректируется при помощи замкнутого контура обратной связи по крену, для чего сигналы инерциальнных датчиков (ДУСу, ДУСz), расположенных в плоскости, перпендикулярной оси вращения снаряда по крену, демодулируются сигналами синуса и косинуса скорректированного угла крена, полученного суммированием интеграла сигнала ДУСх и сигнала обратной связи крена. Сигнал обратной связи крена вычисляется равным арктангенсу демодулированных и отфильтрованных фильтрами низких частот сигналов ДУСу и ДУСz, расположенных в плоскости, перпендикулярной оси вращения снаряда по крену. К недостаткам указанного способа определения угла крена следует отнести невозможность определения угла крена в случае наличия уходов ДУСх.
Известен также способ определения угла крена по патенту США US 8047070, принятый за прототип, отличающийся от патента US 7395987 тем, что демодулированные сигналы угловой скорости инерциальных датчиков, расположенных в плоскости, перпендикулярной продольной оси снаряда, интегрируют, полученные сигналы фильтруют адаптивными фильтрами, причем фильтрация указанных сигналов включает определение основной частоты колебаний с целью ее подавления. Определение основной частоты колебаний осуществляется при применении преобразования Фурье. Коррекция фазы крена, формируемая в цепи обратной связи угла крена, производится фазой, равной арктангенсу демодулированных сигналов интегралов угловых скоростей. Фильтрация сигналов включает также формирование скользящего среднего значений полученных оценок фазы крена с периодом времени усреднения, равным периоду основной частоты колебаний. К недостаткам такого способа определения угла крена следует отнести сложность его определения.
Задачей предлагаемого изобретения является повышение точности определения угла крена при достаточной простоте способа, а также определение углов тангажа и рыскания снаряда.
Поставленная задача решается тем, что в способе определения угла крена бесплатформенной вращающейся по крену инерциальной навигационной системы снаряда, при котором измеряют угловые скорости снаряда в связанной со снарядом вращающейся по крену системе координат, демодулируют угловые скорости, перпендикулярные продольной оси снаряда, углом крена, вычисляемым с поправкой, вводимой за счет обратной связи по углу крена, причем поправку угла крена определяют как предварительное значение поправки угла крена и последующее корректируемое значение поправки угла крена. Предварительное значение поправки угла крена определяют по фазе между средними сглаженными значениями интегралов демодулированных угловых скоростей, а последующее значение поправки - по интегралу угловой скорости разворота снаряда по рысканию, вводимой с коэффициентом, соответствующим требуемой точности определения угла крена. Последующую поправку угла крена осуществляют из условия обеспечения требуемой точности определения угла тангажа, для чего поправку угла крена вводят с дискретностью, заведомо превышающей период собственных колебаний снаряда.
Предлагаемый способ определения угла крена γu осуществляется следующим образом. Предварительная настройка основана на том, что на баллистическом участке траектории снаряд разворачивается в сторону уменьшения угла тангажа и практически не разворачивается по углу рыскания, при этом по измеренным инерциальной системой приращениям углов тангажа ϑu и рыскания ψu можно определить ошибку начальной выставки угла крена. Углы тангажа и рыскания определяют интегрированием демодулированных сигналов датчиков угловой скорости ДУСу и ДУСz, измеряющих проекции угловой скорости вращения снаряда ωy1, ωz1 на оси, связанной со снарядом вращающейся по крену системы координат. Демодуляция осуществляется в соответствии с зависимостями:


Начальные значения измеренных углов тангажа и рыскания (ϑ0 и ψ0), соответствующие расчетным значениям углов тангажа и рыскания в момент начала предварительной настройки, вводят в аппаратуру снаряда перед запуском, последующие значения получают интегрированием выражений (1), (2).
Демодуляция сигналов производится сигналом крена, полученным интегрированием сигнала угловой скорости вращения снаряда по крену. Угловая скорость вращения снаряда по крену определяется в соответствии с зависимостью:

Угол крена получают интегрированием измеренной угловой скорости крена. Начальное значение угла крена считается произвольным (например, нулевым).
Предварительная настройка осуществляется следующим образом. Определяется интервал времени (0.5 с) таким образом, чтобы он был достаточно велик, чтобы усреднить колебательную составляющую приращений измеренных углов, и достаточно мал, чтобы на усреднение существенно не повлиял баллистический разворот снаряда.
В течение предварительной настройки вычисляются приращения ϑr и ψr измеренных углов тангажа ϑu и рыскания ψu относительно начальных значений ϑ0 и ψ0:


В момент начала предварительной настройки должны быть выставлены начальные нулевые значения для сумматоров Sϑ=0, Sψ=0, затем осуществляются операции:


По окончании указанного интервала (0.5 с) вычисляются величины ϑrs и ψrs, которые равны усредненным на этом интервале времени значениям ϑr и ψr:


где n - количество выполненных за 0.5 с операций;
после чего начальные значения углов тангажа и рыскания ϑ0 и ψ0 корректируются:


С этого момента времени продолжают вычисляться величины ϑr и ψr с обновленными начальными значениями ϑ0 и ψ0. Поправка, вносимая в величины ϑ0 и ψ0, позволяет практически исключить ошибки, обусловленные начальной фазой углов тангажа и рыскания, возникающей вследствие колебаний снаряда.
В течение последующего интервала времени (2.5 с) сигналы ϑr и ψr фильтруются с начальными нулевыми значениями апериодическими фильтрами, на выходе которых получают величины ϑra и ψra.
По окончании предварительной настройки (3 с) однократно осуществляется корректировка фазы крена в соответствии с зависимостью:

На этом предварительная настройка завершается.
Последующая подстройка крена осуществляется в соответствии с зависимостью:

где  - фильтрованное апериодическим фильтром измеренное значение угловой скорости рыскания;
- фильтрованное апериодическим фильтром измеренное значение угловой скорости рыскания;
h - период дискретизации.
Коэффициент K1 обратно пропорционален угловой скорости баллистического разворота снаряда по тангажу и вводится, чтобы скомпенсировать влияние изменения угловой скорости тангажа на динамику изменения крена снаряда с учетом того, что


имеем

коэффициент K1 определяется в соответствии с зависимостью:

Коэффициент пропорциональности 0.35 определяется из условия обеспечения требуемого переходного процесса подстройки крена.
В отличие от способа определения крена, описанного в патенте US 8047070, принятом за прототип, определение крена по фазе сигналов тангажа и рыскания производится только при предварительной настройке крена. Последующая подстройка крена осуществляется по интегралу угловой скорости разворота снаряда по рысканию.
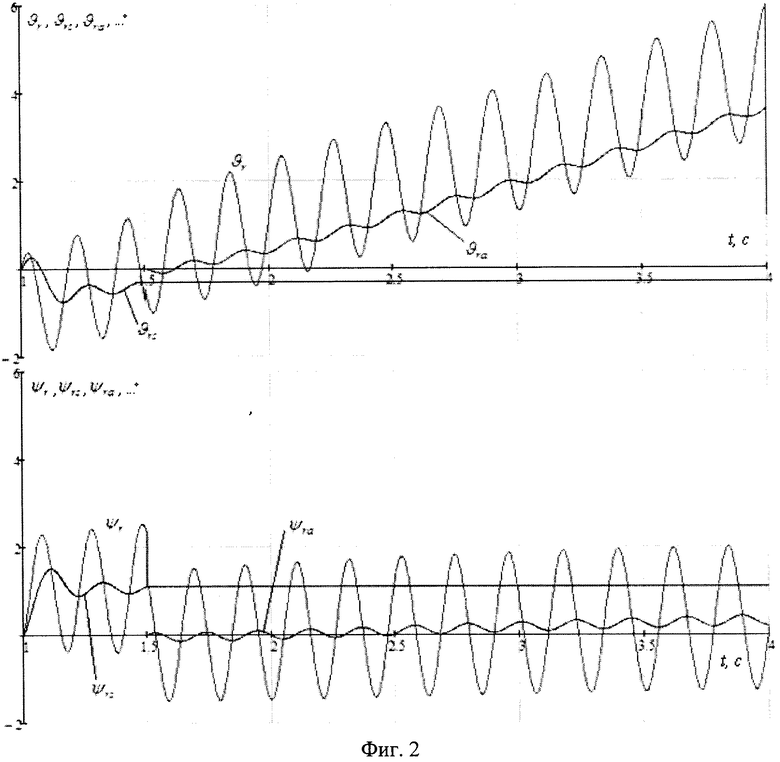
Предлагаемое изобретение иллюстрируется графическими материалами, приведенными на фиг. 1-9. На фиг. 1, 2 приведены процессы предварительной настройки крена в предлагаемом способе угловой ориентации: на фиг. 1 - процесс предварительной настройки угла крена, осуществляемый с 1.0 с до 4.0 с; на фиг. 2 - процессы подстройки углов тангажа и рыскания с 1 с до 4 с. На фиг. 1, 2 обозначено:
Δγu - ошибка в измерении крена;
ϑr, ψr, ϑrs, ψrs - углы, определяемые в соответствии с зависимостями 4-9;
ϑra, ψra - фильтрованные апериодическими фильтрами сигналы ϑrs и ψrs.
Из фиг. 2 видно, что через 0.5 с от момента начала функционирования алгоритма (на 1.5 с) происходит подстройка углов ϑr, ψr на величину ϑrs, ψrs, после чего осуществляется процесс фильтрации углов ϑr, ψr апериодическими фильтрами, на выходах которых получают величины ϑra, ψra. Через 3 с после начала подстройки (на 4 с) (фиг. 1) происходит одноразовая коррекция угла крена в соответствии с зависимостью (12).
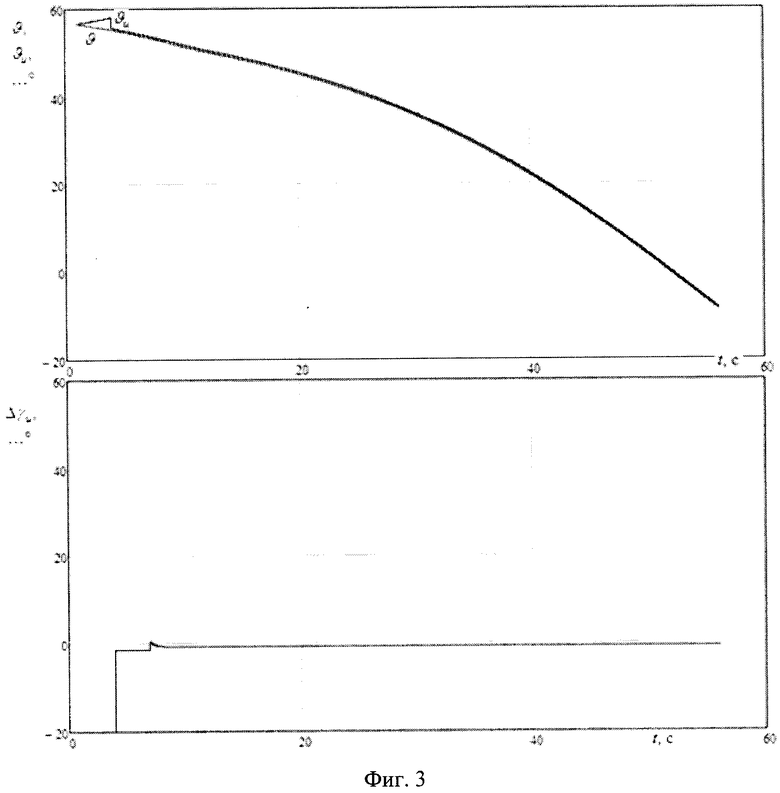
Фиг. 3 поясняет способ определения поправки крена, изложенный в патенте US 7395987, при отсутствии колебаний снаряда и ухода датчика крена ДУСх. Поправка крена формируется по угловой скорости разворота снаряда в соответствии с зависимостью:

где Δγ - поправка крена;

где  ,
,  - отфильтрованные апериодическими фильтрами угловые скорости разворота снаряда.
- отфильтрованные апериодическими фильтрами угловые скорости разворота снаряда.
На фиг. 3 также обозначено:
ϑ, ϑu - угол тангажа снаряда и его измеренное значение;
Δγu - ошибка измеренного значения крена снаряда.
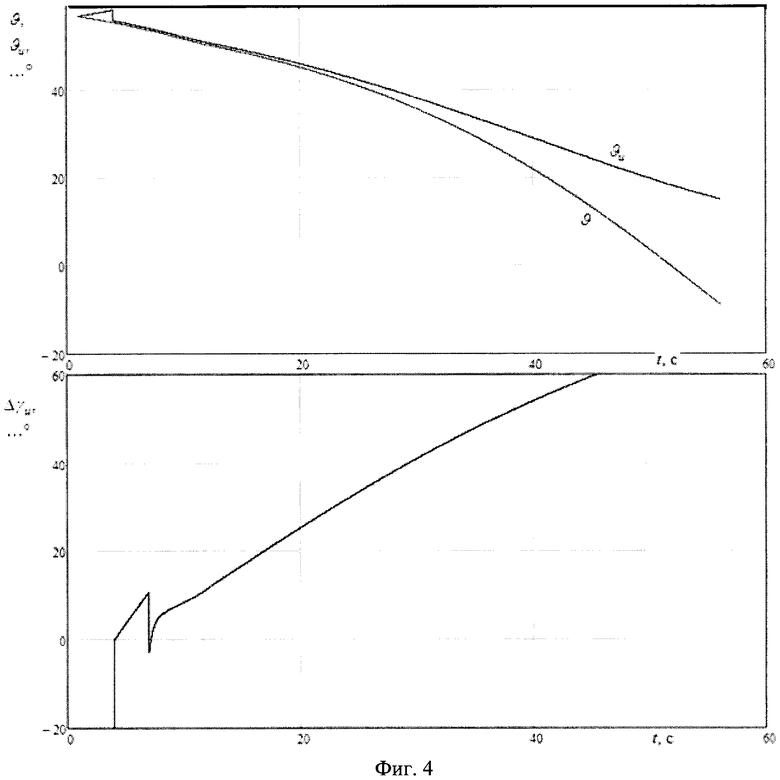
Для сравнения алгоритмов подстройки крена во всех рассмотренных алгоритмах подстройки осуществляется предварительная подстройка крена аналогично предлагаемому способу. Предварительная подстройка осуществляется с 1 с до 4 с. Из фиг. 3 видно, что подстройка крена осуществляется практически идеально: после окончания предварительной подстройки на 4 с ошибка угла крена Δγu изменяется с минус 180° до 1°. Угол тангажа снаряда при этом измеряется практически идеально. Однако при наличии ухода ДУСх, составляющего 0.05% (фиг. 4), ошибка крена после предварительной настройки непрерывно увеличивается, увеличивая ошибку определения тангажа.
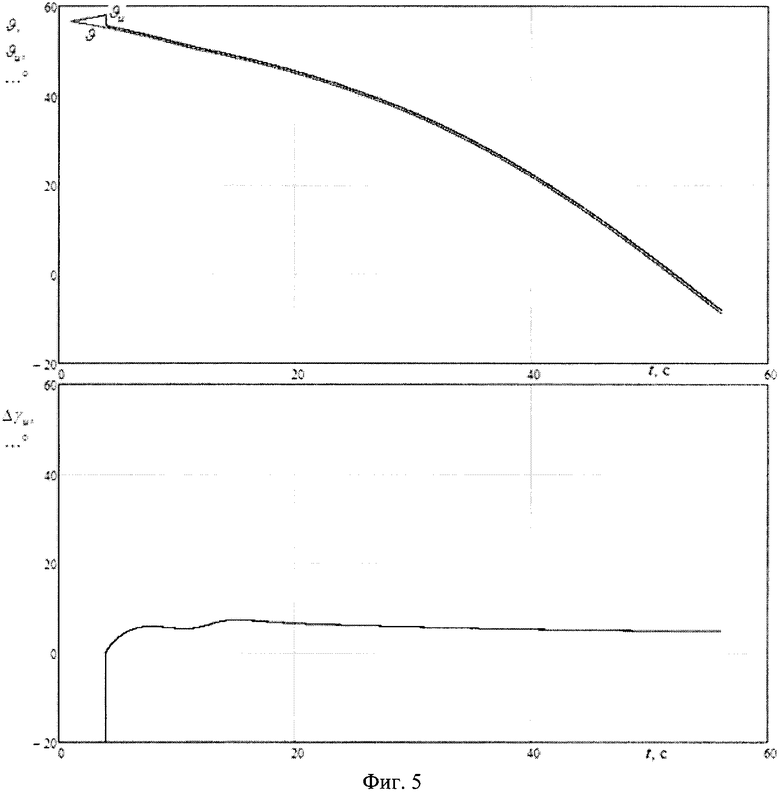
Уменьшить ошибку измерения угла крена, обусловленную уходом ДУСх, позволяет способ, аналогичный способу, приведенному в патенте US 8047070 (фиг. 5). Поправка крена производится при этом в соответствии с зависимостью:
 , обеспечивая интегрирование угловых скоростей тангажа и рыскания с выбранным шагом дискретизации, равным h. Коэффициент 0.35 позволяет оптимизировать переходные процессы подстройки крена. Ошибка измеренного угла крена при этом не превышает 10-5°, угла тангажа - не более 1-2°.
, обеспечивая интегрирование угловых скоростей тангажа и рыскания с выбранным шагом дискретизации, равным h. Коэффициент 0.35 позволяет оптимизировать переходные процессы подстройки крена. Ошибка измеренного угла крена при этом не превышает 10-5°, угла тангажа - не более 1-2°.
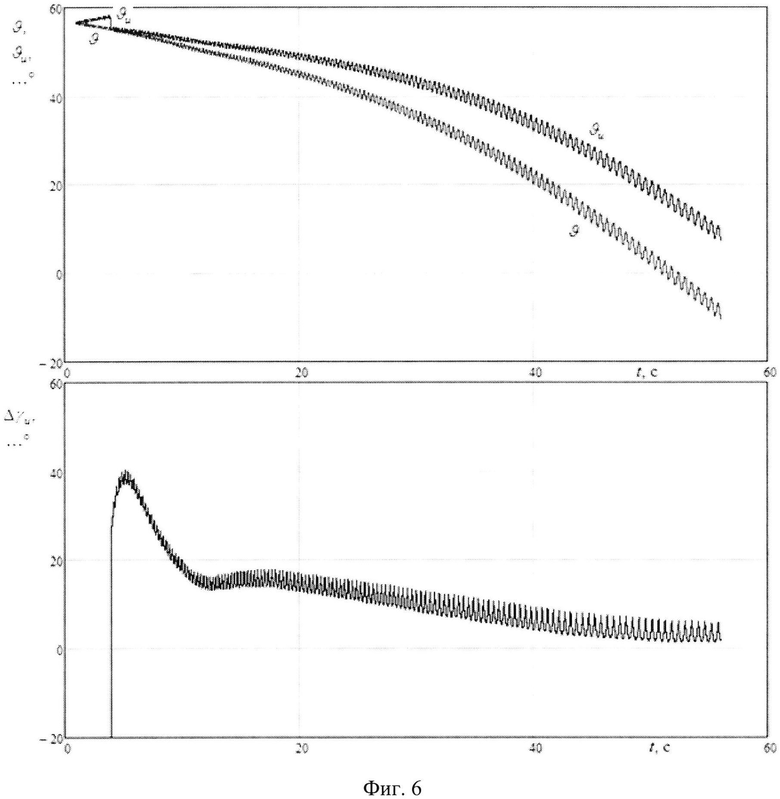
Однако при наличии колебаний снаряда с амплитудой, равной 2°, и подстройке угла крена указанным способом (фиг. 6) ошибка крена составит 18-5°, тангажа - 20°. Для исключения влияния колебаний снаряда на подстройку крена в патенте US 8047070 предлагается ввести фильтрацию ошибки крена с помощью скользящего среднего и преобразования Фурье.
Предлагаемый способ определения крена позволяет упростить процедуру определения поправки крена, обеспечивая требуемую точность определения крена.
Анализ процессов подстройки измеренного крена показал, что при наличии колебаний снаряда величина γu содержит колебания ошибки измерения угла крена на частоте колебаний снаряда. Поэтому использование величины γu для вычисления угловых скоростей тангажа и рыскания приводит к существенным ошибкам измерения углов тангажа и рыскания даже при несущественных (менее 1°) колебаниях ошибки измерения крена.
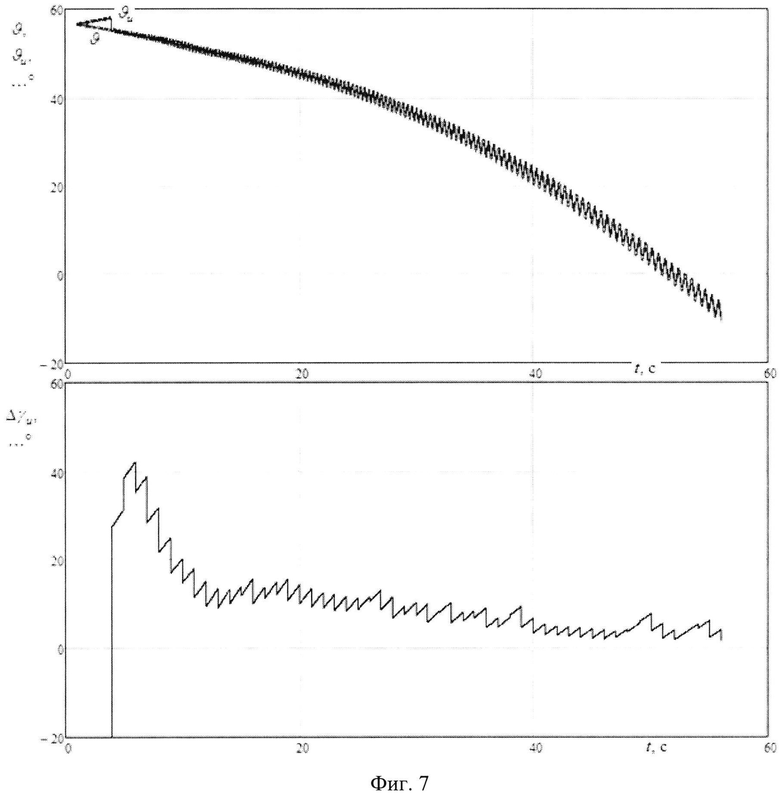
Поэтому величина поправки крена Δγ формируется таким образом, чтобы изменить частоту ошибки измеренного угла крена, выбирая ее заведомо ниже возможной частоты собственных колебаний снаряда, при этом интервал вычисления поправки угла крена, выбирается равным 1 с. Определение поправки угла крена производится при этом в соответствии с зависимостями:


t2=t, если t-t2=1.0 с
Процессы подстройки в этом случае приведены на фиг. 7. Ошибка определения крена составляет 10-2°, ошибка тангажа - не более 2°.
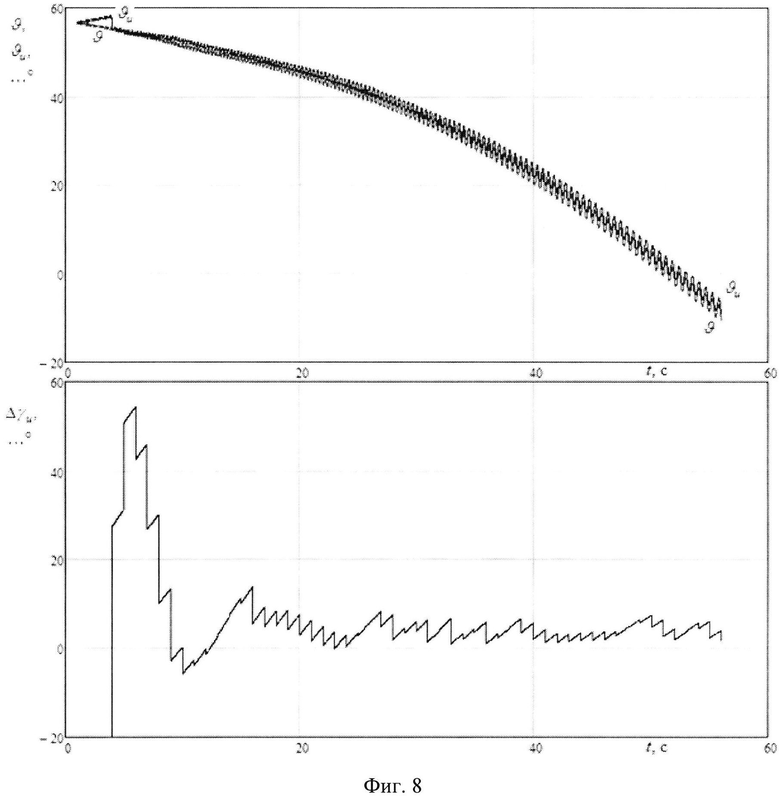
Указанный алгоритм эквивалентен алгоритму определения поправки крена в соответствии с зависимостью, соответствующей патенту US 8047070 (фиг. 8), при вычислении поправки угла крена и углов тангажа, рыскания с интервалом, равным 1 с:

где


t2=t, если t2-t=1.0 с,
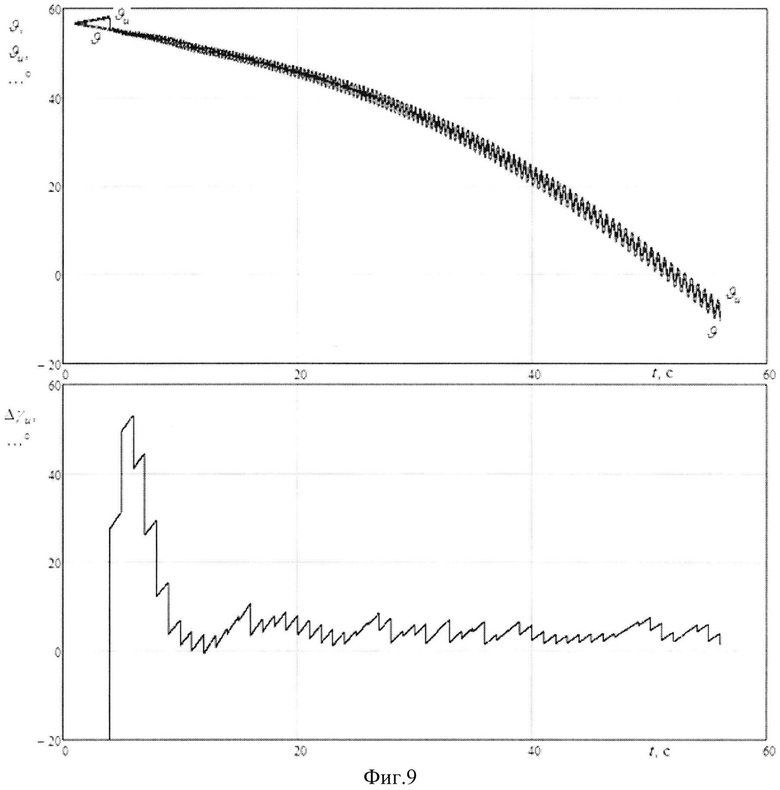
Предлагаемый алгоритм (фиг. 9) отличается от алгоритма, приведенного на фиг. 7, тем, что вместо операции

выполняется операция

т.е. нелинейная функция arg заменяется линейной и это приводит к уменьшению динамической ошибки по крену. Эффект практически такой же, как в алгоритме, соответствующем фиг. 8, но при этом:
- не используется величина  ;
;
- не вычисляется функция arg.
Таким образом, алгоритм проще прототипа (патент US 8047070), в котором используется вычисление arg(-ϑа+jψa), и проще аналога (патент US 7395987), в котором вычисляется 
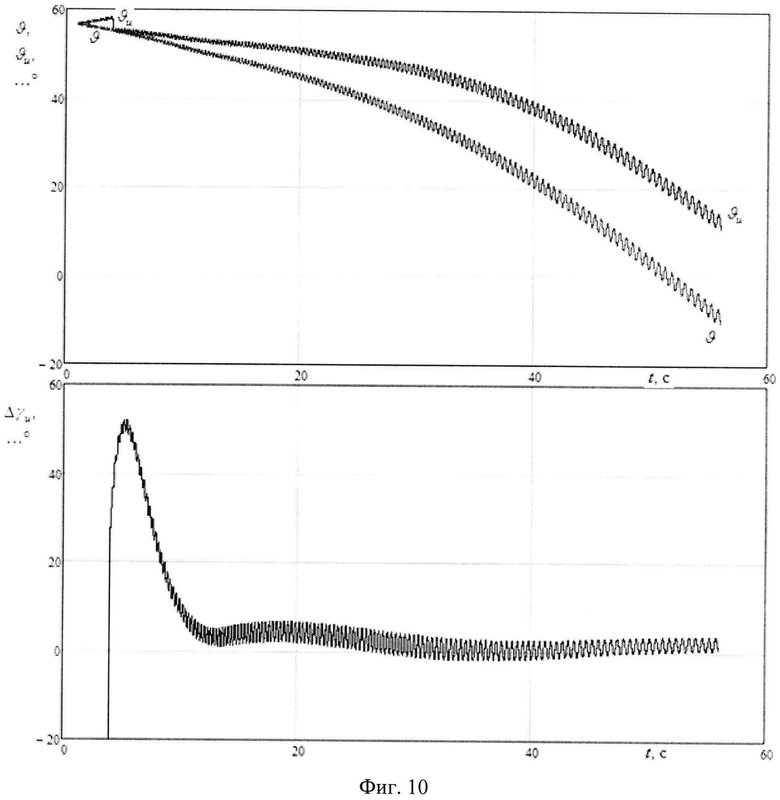
Дискретизация поправки угла крена 1 с в предлагаемом алгоритме позволяет уменьшить ошибку определения тангажа с 20° до не более 2°. Процессы подстройки крена в предлагаемом способе при отсутствии дискретизации приведены на фиг. 10.
Влияние колебаний снаряда на ошибку определения крена можно также уменьшить:
- увеличив постоянную времени апериодического фильтра, что приведет к снижению быстродействия алгоритма;
- применив фильтр, настроенный на подавление текущей частоты собственных колебаний, определить которую достаточно сложно при нерегулярных колебаниях снаряда.
Таким образом, предлагаемый способ определения угловой ориентации бесплатформенной инерциальной навигационной системы позволяет определить угловую ориентацию снаряда на баллистическом участке траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения угла крена быстровращающегося летательного аппарата | 2024 |
|
RU2823718C1 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИОННОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2092402C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2602342C2 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ ВЫСОКОЙ ТОЧНОСТИ | 2015 |
|
RU2615032C1 |
Заявленное изобретение относится к способам определения угла крена бесплатформенной инерциальной навигационной системы вращающегося по крену артиллерийского снаряда. Для определения угла крена измеряют угловые скорости снаряда в связанной со снарядом вращающейся по крену системе координат, демодулируют угловые скорости, перпендикулярные продольной оси снаряда, углом крена с поправкой. Поправку определяют как предварительное и последующее корректируемое значение. Предварительное значение определяют по фазе между средними сглаженными значениями интегралов демодулированных угловых скоростей. Последующее значение определяют по интегралу угловой скорости разворота снаряда по рысканию с определенным коэффициентом. Обеспечивается повышение точности определения угла крена, тангажа и рыскания снаряда. 1 з.п. ф-лы, 10 ил. 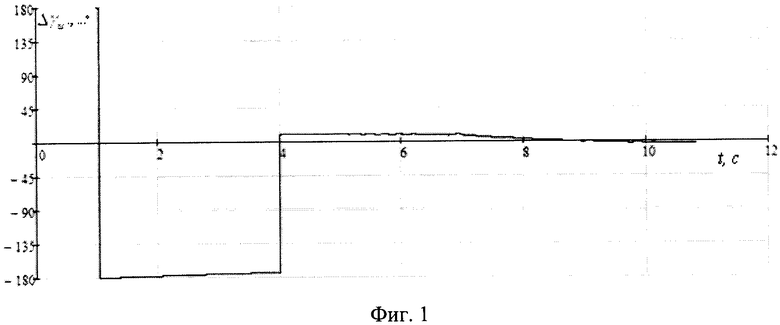
1. Способ определения угла крена бесплатформенной инерциальной навигационной системы вращающегося по крену артиллерийского снаряда, при котором измеряют угловые скорости снаряда в связанной со снарядом вращающейся по крену системе координат, демодулируют угловые скорости, перпендикулярные продольной оси снаряда, углом крена, вычисляемым с поправкой, вводимой за счет обратной связи по углу крена, отличающийся тем, что поправку угла крена определяют как предварительное значение поправки угла крена и последующее корректируемое значение поправки угла крена, причем предварительное значение поправки угла крена определяют по фазе между средними сглаженными значениями интегралов демодулированных угловых скоростей, а последующее значение поправки - по интегралу угловой скорости разворота снаряда по рысканию, вводимой с коэффициентом, соответствующим требуемой точности определения угла крена.
2. Способ по п. 1, отличающийся тем, что последующую поправку угла крена осуществляют из условия обеспечения требуемой точности определения угла тангажа, для чего поправку угла крена вводят с дискретностью, заведомо превышающей период собственных колебаний снаряда.
| US 8047070 B2, 01.11.2011 | |||
| US 2007023567 A1, 01.02.2007 | |||
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |

