Изобретение относится к управлению динамическими объектами, а именно к управлению объектами с присоединенными упругими элементами.
Известно устройство, обеспечивающее управление ориентацией объекта управления за счет реализации пропорционального закона управления. Основной его недостаток - неоптимальные временные затраты на процесс управления.
Известная система ориентации и стабилизации, выбранная в качестве прототипа, содержит последовательно соединенные блок исполнительных органов, объект управления, датчик угловой скорости, усилитель-преобразователь, первый сумматор, первый релейный элемент, выход которого соединен с входами двух систем совпадения, вторые входы которых соединены с выходом второго релейного элемента, второй выход объекта управления соединен с входом датчика угла, выход которого соединен с входами двух сумматоров, второй вход второго сумматора соединен через усилитель с выходом усилителя -преобразователя, а выход - с входом второго релейного элемента, выходы схем совпадения соединены с входами блока исполнительных органов.
Недостатком известного устройства является возможность возбуждения значительных амплитуд колебаний упругого элемента. Это приводит к необходимости длительной стабилизации и демпфированию возбужденных в процессе ориентации колебаний упругого элемента.
Целью изобретения является сокращение длительности переходных процессов
IV
О v|
4 vl
vl
переориентации динамического объекта с присоединенным упругим элементом.
Цель достигается тем, что в устройство, содержащее блок исполнительных органов, соединенный выходом с входом объекта управления с присоединенным упругим элементом, датчик углового отклонения и датчик скорости, входы которых соответственно соединены с перовым и вторым выхо- д амй объекта управления с присоединенным упругим элементом, а их выходы подключены соответственно к информационным входам первого и второго ключей, управляющие входы которых связаны с выходом блока пуска, выходы первого и второго ключей связаны соответственно с первым и вторым входами формирователя знака управляющего момента и первым и вторым входами вычислителя интервалов управления, третий вход и первый выход которого подключены соответственно к первому выходу и третьему входу формировате- ля знака управляющего момента, дополнительно введены первый и второй вычислители временных интервалов, кратных периоду упругих колебаний, задатчик периода упругих колебаний, формирователь уровней управляющего момента и блок переключения управляющего момента, причем второй и третий выходы вычислителя интервалов управления подключены соответственно к первым входам первого и второго вычислителей временных интервалов, кратных периоду упругих колебаний, вторые входы которых подключены к первому выходу задатчика периода упругих колебаний, выход первого вычислителя временных интервалов, кратных периоду упругих колебаний, подключен к первым входам блока переключения управляющего момента и формирователя уровней управляющего мо- . мента, выход второго вычислителя интервалов управления, кратных периоду упругих колебаний, подключен к вторым входам блока переключения управляющего момента и формирователя уровней управляющего момента, первый и второй входы формирователя знака управляющего момента связаны соответственно с третьим и четвертым входами формирователя уровней управляющего момента, первый выход задатчика периода упругих колебаний связан с третьим входом блока переключения управляющего момента и с пятым входом формирователя уровней управляющего момента, первый и второй выходы которого связаны соответственно с четвертым и пятым входами блока переключения управляющего момента, второй выход задатчика периода упругих коле- баний соединен с шестым входом
0
5
0
5
0
5
0
5
0
5
формирователя уровней управляющего момента, шестой и седьмой входы блока пере- ключения управляющего момента соединены соответственно с вторым и третьим выходами формирователя знака управляющего моменты, выход блока пуска связан с третьими входами вычислителей временных интервалов, кратных периоду упругих колебаний, и восьмым входом блока переключения управляющего момента, первый, второй, третий и четвертый выходы блока переключения управляющего момента соединены соответственно с первым, вторым, третьим и четвертым входами блока исполнительных органов.
Предлагаемое устройство обеспечивает сокращение длительности переходных процессов переориентации динамического объекта с присоединенным упругим элементом и тем самым достижение цели изобретения.
Сравнение заявляемого технического решения с прототипом позволило установить соответствие его критерию новизна. При изучении других известных технических решений в данной области техники признаки, отличающие изобретение от прототипа, не были выявлены и поэтому они обеспечивают заявляемому техническому решению соответствие критерию существенные отличия.
В основу изобретения положено следующее. Динамика объекта с присоединенным упругим элементом может быть описана системой уравнений
-I у bs + и;
m s + m v a) i/я + m or2 s - by , где I - массово-инерционный параметр объекта управления;
b - коэффициент взаимовлияния корпуса объекта и упругого элемента;
m - приведенная масса упругого элемента;
ш- частота колебаний упругого элемента;
v - логарифмический декремент затухания;
у- координата корпуса объекта управления;
s - обобщенная координата упругого элемента.
Идея управления таким объектом основывается на независимости от величины управления периода колебаний упругого элемента, который равен
Tk 2 яТ, где Т 1 / ш.
Если управляющее воздействие поддерживать равным и на интервале времени, кратном периоду колебаний Tic- то в конце этого
интервала координаты упругого элемента будут находится в той же точке, что и в момент начала управления (s 0, s 0).
Для оптимального по быстродействию разворота объекта управления как твердого (без учета упругого элемента) необходимо приложить к нему управляющее воздействие релейного вида, имеющее два интервала постоянства, длительности которых определяются выражениями
:Ю
«-TR
где ti, t2 - длительности первого и второго интервалов;
у(0),у(0) - начальное значение фазовых координат;
и - максимальный управляющий момент;
I - момент инерции объекта управления.
Длительности ц, ta могут быть не кратными периоду колебаний упругого элемента (случай кратности является частным и мало- вероятным).т.е.
M Mk + Ati;
t2 t2k + At2,
где tr ti/2 яТ, t2k 12/2 nJ, - часть числа;
Дм 2яТ, . Это может привести к возбуждению значительных по амплитуде колебаний упругого элемента при переключениях управляюще- го воздействия. Однако, если Ati, At2 растянуть до величины, равной Tk, то в конце интервалов управления фазовые координаты упругого элемента окажутся и в этом случае в точке (s 0, s 0), но тогда координаты твердого тела не попадут в цель управления. Совмещение этих двух моментов можно осуществить уменьшением величины управляющего воздействия на растянутых до Tk интервалах Дм, At2. Величины щ , U2 на этих интервалах легко определить из выражений
U1
-Т Г О-тлТ - Х ®
U2 {I У (0) + I У (ОХ ЯТ + t1k) + U( Я Т ( + t2k) + ( + t2k2))}/(-2 л Т(2 Л Т + T2k), (4)
которые получены из системы уравнений относительно длительностей интервалов при учете, что
Дм At2 .
10
15
20
25
3Q
gg о я
5С
55
Знак управляющего момента на первом интервале определяют в соответствии с выражением
и - lulsign
). (5)
В результате в конце управления все фазовые координаты будут удовлетворять конечным условиям ( у 0, у 0, s 0, s 0). Длительность же разворота будет больше оптимальной не более чем на два периода колебаний упругого элемента.
Для оценки преимуществ предлагаемого способа был проведен ряд математических экспериментов. Осуществлялся разворот объекта управления с параметрами:
Момент инерции объекта I 1400 кг-м-с2;
Максимальный управляющий момент - 48,57 кг-м;
Приведенная масса упругого элемента m 3,5 кгс2/м:
Коэффициент взаимовлияния упругого элемента и корпуса объекта b 10 кгс ;
Собственная частота колебаний упругого элемента ш 51/с;
Дтина упругого элемента h 2м;
Логарифмический декремент затухания ,05;
на 10 градусов при нулевых значениях остальных фазовых координат. Длительности интервалов управления объекта как твердого тела равны м Т2 2,2657 с,
при этом их кратные периоду колебаний упругого элемента части равны tik t2k 1,2551 с. Уровни управляющего момента
иГ U2 41,68 кг-м.
В конце управления все фазовые координаты оказались в нуле, что соответствует цели управления. При этом длительность управления составила tynp 5,0205 с, в то время как длительность управления, оптимального по быстродействию, объектом как твердым телом равна tonr 4,5314 с, однако к ней необходимо добавить время, затрачиваемое на затухание (или стабилизацию) остаточных колебаний упругого элемента.
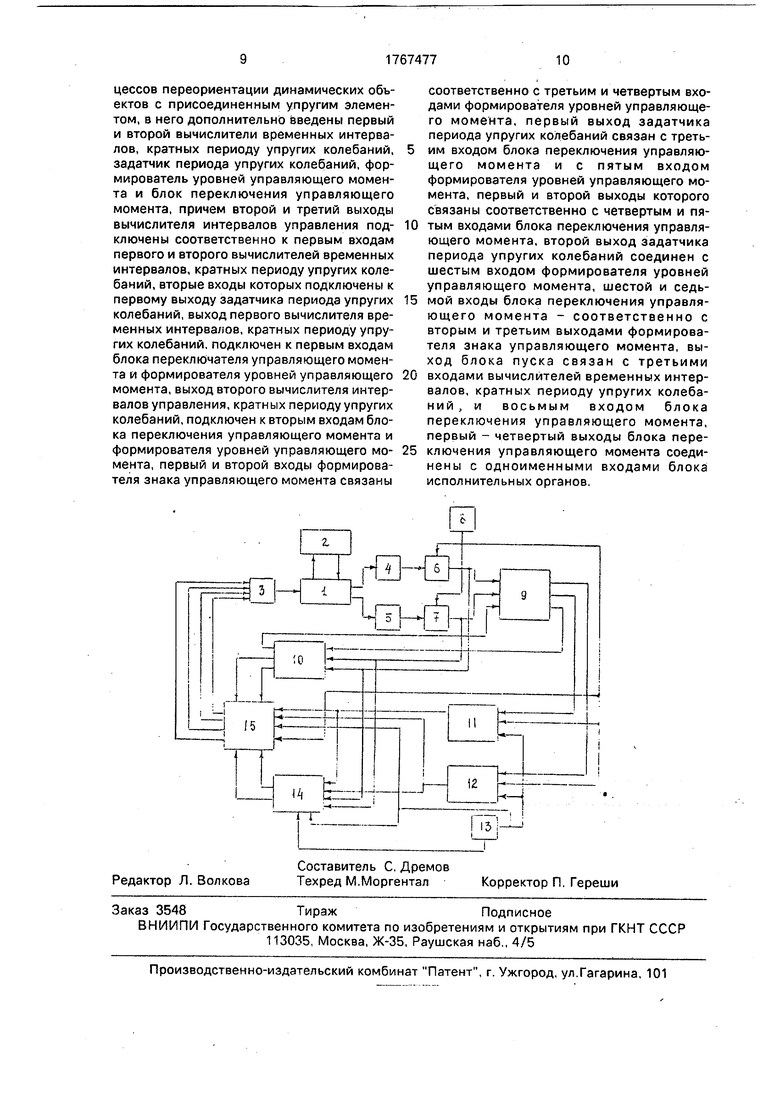
Иа чертеже представлена структурная схема предлагаемого устройства.
Устройство состоит из объекта 1 управления с присоединенным упругим элементом 2, блока исполнительных органов 3, способного создавать управляющее воздействие разных знаков, регулируемое по величине, датчиков угла 4 и угловой скорости 5, двух ключей 6 и 7, блока пуска 8, вычислителя интервалов управления 9, формирователя знака управляющего момента 10, двух вычислителей временных интервалов, кратных периоду упругих колебаний, 1 и 12, задатчика периода упругих колебаний 13, на первом выходе которого сигнал про- порционален Tk, а на втором Tk/2, формирователя уровней управляющего момента 14, блока переключения управляющего момента 15.
Устройство работает следующим обра- зом.
Текущие значения угла и угловой скорости снимаются с датчика угла 4 и датчика угловой скорости 5. При необходимости совершения разворота объектом 1 с присоеди- ненным упругим элементом 2 включают блок пуска 8 (это может быть просто нажатие кнопки Пуск). Разрешающий сигнал поступает на логические входы ключей 6 и 7, в вычислители временных интервалов, кратных периоду упругих колебаний, 11 и 12 и в блок переключения управляющего момента 15. Начальные значения угла и угловой скорости объекта поступают на входы вычислителя интервалов управления 9, на выходах которого формируются сигналы, пропорциональные длительностям интервалов управления объектом как твердым телом ti и ta, вычисленные в соответствии с выражениями (1), (2), и на входы формирова- теля знака управляющего момента 10, с первого выхода которого управляющий сигнал определенного в соответствии с выражением (5) знака и соответствующий максимальному управляющему воздействию через блок переключения управляющего момента 16 включает блок исполнительных органов 3, который создает максимальный управляющий момент соответствующего знака. С первого и второго выходов вычислителя ин- тервалов управления 9 сигналы, пропорци- . ональные соответственно ti и t2,поступают на входы соответственно первого и второго вычислителей временных интервалов, кратных периоду упругих колебаний, 11 и 12. Кроме того, на входы этих вычислителей поступает сигнал, пропорциональный рели- чине Tk с первого выхода задатчика периода упругих колебаний 13. На выходах вычислителей временных интервалов, кратных пе- риоду упругих колебаний, 11 и 12 сформируются сигналы, пропорциональные соответственно величинам ц и ta . На выходах формирователя уровней управляющего момента 14 сформируются сигналы, пропорциональные и Г и U2 , вычисленные в соответствии с выражениями (3) и (4). Сигналы, пропорциональные tik, t2k и Tk, поступают на входы блока переключения управляющего момента 15. Когда длительность управления, соответствующая действию максимального управляющего момента, станет равной tik, на вход блока исполнительных органов 3 поступит через блок переключения управляющего момента 15 сигнал, пропорциональный и/, переключая его на создание управляющего момента того же знака, но величиной и/. Такой управляющий момент создается в течении времени Tk. Затем происходит переключение на создание максимального управляющего момента противоположного знака в течение времени Т2 и момента иг в течение времени Tk. Схема возвращается в исходное состояние. Процесс управления заканчивается.
Использование предлагаемого устройства управления динамическим объектом с присоединенным упругим элементом позволяет по сравнению с известными существенно сократить длительность управления, что подтверждают результаты математического эксперимента.
Описываемое устройство в конце разворота полностью гасит колебания упругого элемента, вто время как прототип оставляет упругий элемент в возбужденном состоянии. При этом создаются возмущающие ускорения, достигающие по величине единиц и даже десятков процентов от ускорения, сообщаемого объекту исполнительными органами. Поэтому процесс высокоточной стабилизации может существенно затягиваться и превышать по длительности в несколько раз процесс разворота (до 30- 60 с и более).
Формула изобретения
Устройство управления динамическим объектом с присоединенным упругим элементом, содержащее блок исполнительных органов, соединенный выходом с входом объекта управления с присоединенным упругим элементом, датчик углового отклонения и датчик скорости, входы которых соответственно соединены с первым и вторым выходами объекта управления с присоединенным упругим элементом, а их выходы подключены соответственно к информационным входам первого и второго ключей, управляющие входы которых связаны с выходом блока пуска, выходы первого и второго ключей связаны соответственно с первым и вторым входами формирователя знака управляющего момента и вычислителя интервалов управления, третий вход и первый выход которого подключены соответственно к первому выходу и третьему входу формирователя знака управляющего момента, отличающееся тем, что, с целью сокращения длительности переходных процессов переориентации динамических объектов с присоединенным упругим элементом, в него дополнительно введены первый и второй вычислители временных интервалов, кратных периоду упругих колебаний, задатчик периода упругих колебаний, формирователь уровней управляющего момента и блок переключения управляющего момента, причем второй и третий выходы вычислителя интервалов управления подключены соответственно к первым входам первого и второго вычислителей временных интервалов, кратных периоду упругих колебаний, вторые входы которых подключены к первому выходу задатчика периода упругих колебаний, выход первого вычислителя временных интервалов, кратных периоду упругих колебаний, подключен к первым входам блока переключателя управляющего момента и формирователя уровней управляющего момента, выход второго вычислителя интервалов управления, кратных периоду упругих колебаний, подключен к вторым входам блока переключения управляющего момента и формирователя уровней управляющего момента, первый и второй входы формирователя знака управляющего момента связаны
соответственно с третьим и четвертым входами формирователя уровней управляющего момента, первый выход задатчика периода упругих колебаний связан с третьим входом блока переключения управляющего момента и с пятым входом формирователя уровней управляющего момента, первый и второй выходы которого связаны соответственно с четвертым и пятым входами блока переключения управляющего момента, второй выход задатчика периода упругих колебаний соединен с шестым входом формирователя уровней управляющего момента, шестой и седьмой входы блока переключения управляющего момента - соответственно с вторым и третьим выходами формирователя знака управляющего момента, выход блока пуска связан с третьими
входами вычислителей временных интервалов, кратных периоду упругих колебаний , и восьмым входом блока переключения управляющего момента, первый - четвертый выходы блока переключения управляющего момента соединены с одноименными входами блока исполнительных органов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления объектом с присоединенными упругодеформируемыми элементами | 1989 |
|
SU1767476A1 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Устройство для управления резонансным объектом | 1979 |
|
SU781780A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Устройство для регулирования массовых расходов смешиваемых продуктов | 1988 |
|
SU1695273A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2003 |
|
RU2241251C1 |
| Устройство для регулирования расхода жидкости | 1984 |
|
SU1236434A2 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Беспоисковое управляющее устройство | 1978 |
|
SU798702A1 |
Изобретение относится к управлению динамическими объектами, а именно к управлению объектами с присоединенными упругими элементами. Целью изобретения является сокращение длительности переходных процессов переориентации динамического объекта с присоединенным упругим элементом. С этой целью устройство, содержащее объект управления с присоединенным упругим элементом, блок исполнительных органов, датчики углового положения и скорости, формирователь знака управляющего момента и вычислитель интервалов управления, дополнительно снабжен двумя вычислителями временных интервалов, крэтных периоду упругих колебаний, задатчиком периода упругих колебаний, формирователем уровней управляющего момента и блоком переключения управляющего момента. 1 ил. СО с
| Разыграев А.П | |||
| Основы управления полетом космических аппаратов и кораблей | |||
| М.: Машиностроение, 1977 | |||
| Система ориентации и стабилизации | 1981 |
|
SU966669A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
