1
(21)4834949/11 (22) 05.06.90 (46)23.11.92. Бюл. №43
(71)Харьковский тракторный завод им. Сер- го Орджоникидзе
(72)П.М.Горяшко, Н.Ф.Шашков, С.В.Лаврентьев и А.Ю.Прилуцкий
(56)Огий Г.Е. и др. Направляющее колесо и гусеница трактора Т-150. - Сельский механизатор, 1973, № 5, М.: Колос, с.28.
(54) ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА
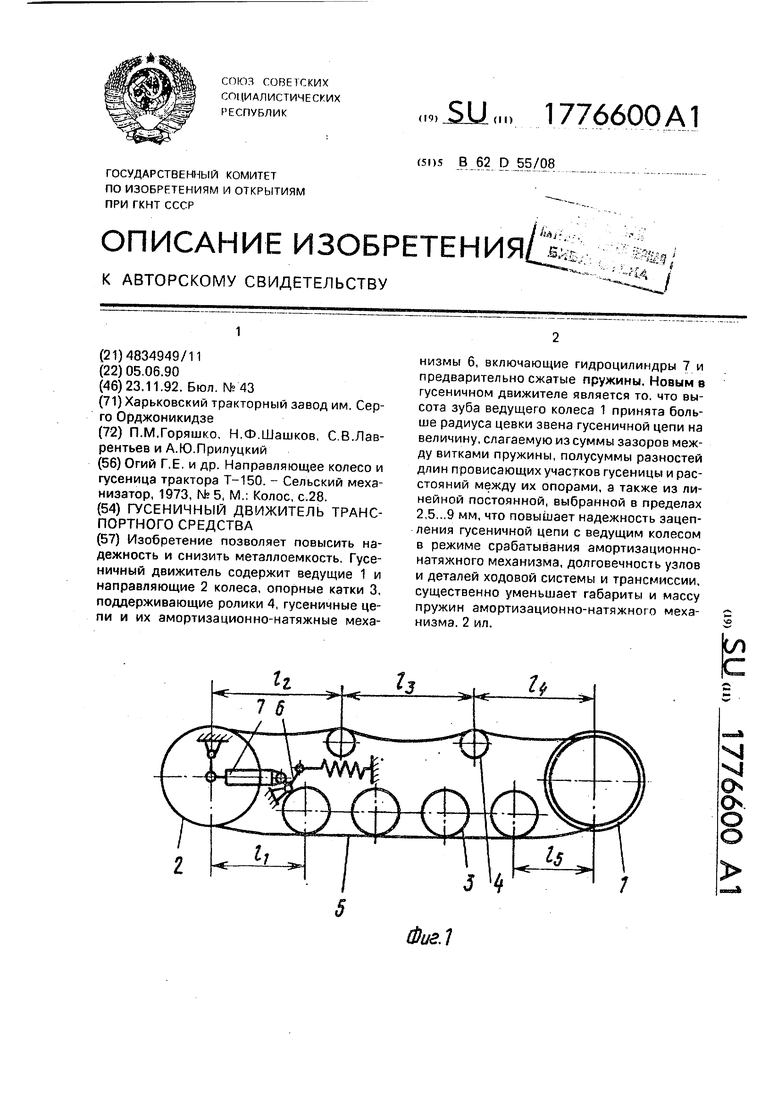
(57)Изобретение позволяет повысить надежность и снизить металлоемкость. Гусеничный движитель содержит ведущие 1 и направляющие 2 колеса, опорные катки 3, поддерживающие ролики 4, гусеничные цепи и их амортизационно-натяжные механизмы б, включающие гидроцилиндры 7 и предварительно сжатые пружины. Новым в гусеничном движителе является то. что высота зуба ведущего колеса 1 принята больше радиуса цевки звена гусеничной цепи на величину, слагаемую из суммы зазоров между витками пружины, полусуммы разностей длин провисающих участков гусеницы и расстояний между их опорами, а также из линейной постоянной, выбранной в пределах 2,5...9 мм, что повышает надежность зацепления гусеничной цепи с ведущим колесом в режиме срабатывания амортизационно- натяжного механизма, долговечность узлов и деталей ходовой системы и трансмиссии, существенно уменьшает габариты и массу пружин амортизационно-натяжного механизма. 2 ил.
СП
| название | год | авторы | номер документа |
|---|---|---|---|
| ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2017 |
|
RU2676842C1 |
| ТРАКТОР-ВЕЗДЕХОД | 1999 |
|
RU2179939C2 |
| Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора | 2023 |
|
RU2835909C1 |
| ПРИВОД ГУСЕНИЧНОГО ДВИЖИТЕЛЯ БЫСТРОХОДНОЙ МАШИНЫ | 1990 |
|
RU2033937C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2006 |
|
RU2303549C1 |
| Гусеничная лента | 1990 |
|
SU1751037A1 |
| Устройство для натяжения гусеницы транспортного средства | 1990 |
|
SU1724508A1 |
| Гусеничный движитель | 1980 |
|
SU882811A1 |
| Гусеница с резинометаллическим шарниром параллельного типа и цевочным зацеплением с ведущим колесом | 2021 |
|
RU2761974C1 |
| Тележка гусеничная сменная для трактора | 2017 |
|
RU2658505C1 |
х| ч о сх о
;
Фиг.1
Изобретение относится к машиностроению и может быть использовано в гусенич- ных транспортныхсредствах
многоцелевого назначения.
Известны гусеничные движители транспортных средств (см. Анилович В.Я., Водо- лажченко Ю.Т. Конструирование и расчет сельскохозяйственных тракторов. -М.: Машиностроение, 1976, с.338, с.355), содержащие ведущие и направляющие колеса, опорные катки и поддерживающие ролики, охватывающие их гусеничные цепи, аморти- зационно-натяжные механизмы гусеничных цепей с предварительно сжатыми пружинами (аналог).
В описанных конструкциях величину максимального упругого хода направляющего колеса рекомендуется выбирать из ус- ловия выхода гусеничной цепи из зацепления с зубьями ведущего колеса в аварийных ситуациях движения транспортного средства по формуле
С 0,5лп(1)
h - высота зуба ведущего колеса (см. также Попов Е.Г. Параметры амортиза- ционно-натяжного устройства, обеспечивающие надежную работу ходовой системы с металлической гусеницей, - Труды НАТИ, выпуск 265.-М., 1978, с.32).
Однако из опыта эксплуатации и расчетов следует, что упругий ход С, обеспечивающий полную компенсацию гусеничного обвода при выходе из зацепления гусеницы с ведущим колесом, значительно больше той величины С, которая необходима для ограничения натяжения гусеницы в экстремальных условиях движения транспортного средства, например преодоление сосредоточенных препятствий (см. Анилович В.Я., Водолажченко Ю.Т. Конструирование и расчет сельскохозяйственных тракторов. - М,: Машиностроение, 1976, с.355).
В качестве прототипа выбран гусеничный движитель, который содержит ведущие и направляющие колеса, опорные катки и поддерживающие ролики, охватывающие их гусеничные цепи, амортизационно-на- тяжные механизмы гусеничных цепей, включающие гидроцилиндры натяжения и предварительно сжатые пружины. Величина деформации амортизационно-натяжных механизмов выбрана из условий выхода гусеничных цепей из зацепления с зубьями ведущих колес (см. Огий Г.Е. и др. Направляющее колесо и гусеница трактора Т-150, - Сельский механизатор, 1973, № 5, - М,: Колос, с.28).
Недостатком этой известной конструкции является то, что в режиме срабатывания амортизационно-натяжного механизма.
между ведущим колесом и последним опорным катком образуется большое провисание звеньев гусеничной цепи, так называемый мешок, что приводит к проскальзыванию гусеничной цепи по зубьям ведущего колеса и выходу из зацепления с ним, Это явление сопровождается большими ударными нагрузками на детали ходовой системы и трансмиссии, т.к. после выхода
на вершины зубьев цевки звеньев верхней натянутой ветви гусеничной цепи возвращаются во впадины ведущего колеса под воздействием полностью сжатой пружины амортизатора. Кроме того, при повороте
транспортного средства возможно соскакивание гусеничной цепи.
Таким образом, упругий ход С направляющего колеса, выбранный из условия выхода гусеничной цепи из зацепления с
зубьями ведущего колеса в режиме срабатывания амортизационно-натяжного механизма, способствует снижению надежности деталей ходовой системы и трансмиссии, соскакиванию гусеничной цепи и, как следствие, снижению надежности зацепления гусеничной цепи с ведущим колесом.
Кроме того, пружины амортизационно- натяжных механизмов, обеспечивающие величину упругого хода по формуле (1), имеют большие массу и габариты.
Целью изобретения является повышение надежности гусеничного движителя в работе и снижение металлоемкости за счет обеспечения надежного зацепления гусеничной цепи с ведущим колесом в режиме срабатывания амортизационно-натяжного механизма.
Поставленная цель достигается благодаря тому, что в гусеничном движителе
транспортного средства, содержащем ведущие и направляющие колеса, опорные катки и поддерживающие ролики, охватывающие их гусеничные цепи, амортизационно-на- тяжные механизмы гусеничных цепей,
включающие гидроцилиндры натяжения и предварительно сжатые пружины, согласно изобретению, зуб ведущего колеса выполнен с высотой, определяемой по формуле
1р jx f2
(m-1) + | 2-г- + 2Д(2)
О | - 1 IQ
где h - высота зуба ведущего колеса;
Гц - радиус цевки звена гусеницы; S - величина зазора между витками предварительно сжатой пружины амортизационно-натяжного механизма;
m - полное число витков пружины амортизационно-натяжного механизма,
fi - провисание гусеничной цепи в статике на i-том участке;
li - расстояние между опорами 1-того участка гусеницы;
А -линейная постоянная, характеризующая степень упругости гусеничной цепи и поджатия опорных катков, выбранйая в пределах 2,5..,9 мм (определяется опытным путем).
В отличии от известных технических решений, в предложенном гусеничном движителе транспортного средства величина суммы зазоров между витками пружины амортизационно-натяжного механизма, определяющая упругий ход направляющего колеса, уменьшена на величину радиуса цевки звена гусеницы и линейной постоянной, выбранной в пределах 2,5...9 мм, что позволяет предотвратить проскальзывание гусеничной цепи по зубьям ведущего колеса и возникновение ударных нагрузок на детали ходовой системы и трансмиссии при дви- жении в режиме срабатывания амортизационно-натяжного механизма.
Признаков, сходных с упомянутыми отличительными признаками заявляемой конструкции, при исследовании патентной документации и научно-технической литературы, не обнаружено, что позволяет сделать вывод о наличии существенных отличий.
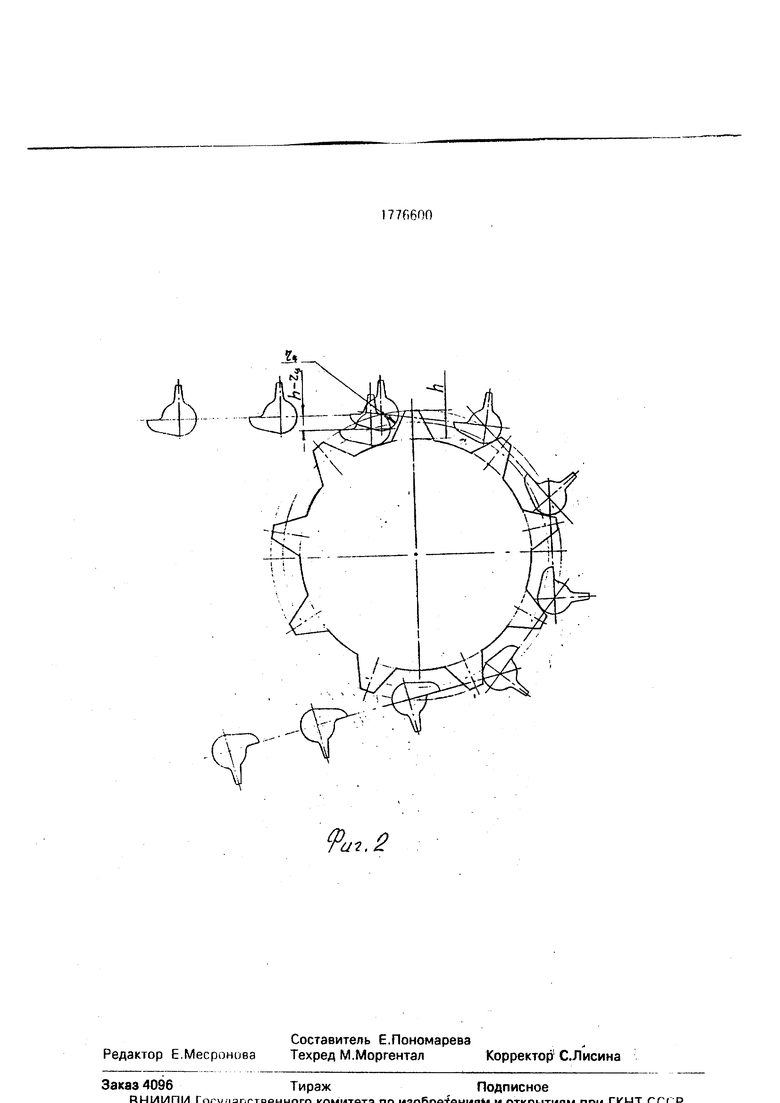
На фиг. 1 изображена схема гусеничного движителя; на фиг.2 - зацепление гусеничной цепи с ведущим колесом в режиме сра- батывания амортизационно-натяжного механизма.
Гусеничный движитель состоит из ведущих 1 и направляющих 2 колес, опорных катков 3, поддерживающих роликов 4, гусеничных цепей 5 и их амортизационно-на- тяжных механизмов 6, включающих в себя гидроцилиндры 7. Гусеничная цепь 5 по всему своему обводу образует в статике участки провисания, расстояния по опорам которых равны: между передним опорным катком 3 и направляющим колесом 2 - И. между направляющим колесом 2 и передним поддерживающим роликом 4 -12, между передним и задним поддерживающими роликами 4 - 1з, между задним поддерживающим роликом 4 и ведущим колесом 1 - Ц и между ведущим колесом 1 и задним опорным катком 3 - Is
Предложенный гусеничный движитель работает следующим образом.
При движении транспортного средства по неровностям пути в условиях намерзания льда на беговые дорожки гусеницы и ободья ведущих и направляющих колес, как показывают расчеты и опыт эксплуатации,
компенсация распора обода гусеничной цепи осуществляется в основном за счет спрямления провисающих ее участков. В динамике указанные провисания могут временно перемещаться с одного участка на другой в зависимости от рода движения, но их суммарная величина равна сумме провисаний в статике. Освобождаемую за счет провисаний длину гусеничной цепи можно
определить по формуле
По nf
2 (s.-io-§ s 4)1 j
(4)
где Si - длина провисающего участка гусеничной цепи между соответствующими опорами, равная длине цепной линии на этих участках;
li - расстояние между опорами 1-того участка гусеничной цепи;
fi - провисания гусеницы на I-том участке.
При проектировании гусеничного движителя принимается
-(ТБ-20 (5)
(см. Уткин-Любовцев О.Л. Потери мощности в ходовой части гусеничного трактора. Труды НАТИ, выпуск 51. - М„ 1975).
При попадании же посторонних предметов между ведущим 1 или направляющим 2 колесами и гусеничной-цепью или преодолении сосредоточенного препятствия дальнейшая компенсация длины гусеничного
обвода происходит за счет деформации предварительно сжатой пружины амортизационно-натяжного механизма, дающей возможность перемещения направляющего колеса 2, величина которого определяется
как сумма зазоров между ее витками.
В конце упругого хода направляющего колеса 2 достигает своего максимального значения деформация гусеничной цепи 5 и поджатия опорных катков 3, которую можно
представить в виде линейной постоянной выбранной в пределах 2.5...9 мм (см. Попов Е.Г. Параметры амортизационно-натяжного устройства, обеспечивающие надежную работу ходовой системы с металлической гусеницей, Труды НАТИ, выпуск 256. - М. ,1978, с.32, табл.1). Для каждой конкретной конструкции ходовой системы она определяется опытным путем и зависит от нагрузок, действующих в гусеничном обводе, и геометрических параметров его деталей.
При этом суммарная величина зазоров между витками пружины, по заявляемому изобретению, должна быть ограничена таким образом, чтобы не допустить проскаки- вание цеаок звеньев гусеничной цепи по
вершинам зубьев ведущего колеса. Желаемый эффект достигается путем уменьшения радиуса окружности, на которую выходят центры цевок звеньев гусеничной цепи, при срабатывании амортизационно-натяжного механизма на величину радиуса цевки гусеницы Гц. Если в режиме обычного рабочего зацепления цевки звеньев укладываются по окружности впадин между зубьями ведущего колеса, то для проскакивания цевок звеньев по вершинам зубьев необходим их выход на окружность вершин зубьев, т.е. на окружность, радиус которой больше радиуса окружности впадин на величину высоты зуба h ведущего колеса, а для предотвращения такого проскакивания на величину (h Гц).
Таким образом, повышение надежности гусеничного движителя предлагается достичь ограничением величины упругого хода направляющего колеса таким ее значением, которое предотвращает проскакива- ние гусеничной цепи по вершинам зубьев ведущего колеса и возникновение при этом ударных нагрузок на детали ходовой системы и трансмиссии трактора. Кроме того, с уменьшением упругого хода направляющего колеса существенно уменьшаются габариты и масса пружины амортизационно-натяжного механизма. Все это доказывает соответствие заявляемого технического решения критерию положительный эффект.
В аварийных же ситуациях движения транспортного средства, когда упругого хода направляющего колеса не хватает, для ограничения растягивающих гусеничную цепь нагрузок или для прекращения воздействия силы удара на детали амортизационно-натяжного механизма, срабатывает предохранительный клапан его гидроцилиндра 7 (клапан на чертеже не показан).
Технико-экономические преимущества заявляемого гусеничного движителя заключается в повышении надежности зацепления гусеничной цепи с ведущим колесом в
режиме срабатывания амортизационно-натяжного механизма, в повышении долговечности узлов и деталей ходовой системы и трансмиссии, в существенном уменьшении габаритов и массы пружин амортизационно-натяжного механизма,
Формула изобретения Гусеничный движитель транспортного средства, содержащий ведущие и направляющие колеса, опорные катки и поддерживающие ролики, охватывающие их гусеничные цепи, амортизационно-натяжные механизмы гусеничных цепей, включающие гидроцилиндры натяжения и предварительно сжатые пружины, отличающийся тем,
что, с целью повышения надежности и снижения металлоемкости, зуб ведущего колеса выполнен с высотой, определяемой по формуле
25
г,-гц (m-1) + f | -|- + 2Д,
где h - высота зуба ведущего колеса; Гц - радиус цевки звена гусеницы; S - величина зазора между витками предварительно сжатой пружины амортизационно-натяжного механизма;
m - полное число витков пружины амор- тизациоино-натяжного механизма; fi - провисание гусеничной цепи в статике на i-м участке;
li - расстояние между опорами 1-го участка гусеницы;
Д-линейная постоянная, характеризую- щая степень упругости гусеничной цепи и под- жатия опорных катков, выбранная в пределах 2,5-9 мм (определяется опытным путем).
