Изобретение относится к области автоматизации двигательных установок,
в частности к системам автоматического регулирования производительное
ги мотор-вентилятора, и может быть использовано в системах регулирования температуры теплоносителей тепловых машин, например дизеля тепловоза.
Известна машина автоматического регулирования температуры теплоносителей дизеля тепловоза 2ТЭ116, содержащая мотор-вентиляторы, электрическую линию управления включением мотор-вентиляторов, включающую переключатель режимов работы, переключатель дистанционного управления, кон- такторные устройства и датчики-реле температуры.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому решению является система автоматического управления охлаждением силовой установки, преимущест- венно тепловоза, содержащая по меньшей мере один мотор-вентилятор, электрическую линию управления работой мотор-вентилятора, включающую переключатель режимов работ,выключатель дистанционного управления, контактор- ное устройство, датчики-реле температуры, пневматическую линию управления работой мотор-вентилятора, включающую последовательно соединенные регулирующее устройство, связанное с датчиком температуры, и позиционер - с линией питания.
Недостатком известной системы является то, что при переходе ее на дистанционный режим запуск мотор-вен тиляторов производится с максимальной производительностью, т.к. при данной схеме подключения регулирующих устройств к мотор-вентилятору с поворотными лопастями в мембранной полости мо.тор-вентилятора остается такой уровень давления, при котором лопасти устанавливаются с максималь
,
ным углом ризворота, что приводит при пусковом режиме к повышенным затратам электрической энергии, подгоранию электрических контакторов, снижению экономичности.
Целью изобретения является повышение долговечностио
Цель достигается тем, что в отличие от известной системы автоматического управления охлаждением силовой установки, преимущественно тепловоза , содержащей по меньшей мере один мотор-вентилятор, электрическую линию управления работой мотор-вентилятора, включающую переключатель
5
Ю
15
,,. 2530
35
40
45
50
55
режимов работ, выключатель дистанционного управления, контакторное устройство, датчики-реле температуры, пневматическую линию управления работой мотор-вентилятора, включающую последовательно соединенные регулирующее устройство, связанное с датчиком температуры, и позиционер - с линией питания, предлагаемая система снабжена первым электропневмоклапаном с двумя входами и двумя выходами, вторым электропневмоклапаном с тремя входами и одним выходом, емкостью, размещенной между первым выходом первого электропневмоклапана и первым входом второго электропневмоклапана, и регулируемым дросселем, соединенным с одной стороны, с вторым выходом первого электропневмоклапана, а с другой - с атмосферой, причем первый вход первого электропневмоклапана подключен к линии питания позиционера, второй вход - к выключателю дистанционного управления, второй вход второго электропневмоклапана подсоединен к позиционеру, третий вход - к переключателю режимов работ, а выход второго электропневмоклапана - к мотор-вентилятору.
На фиг о 1 представлена функцио нальная схема системы дистанционного и автоматического управления охлаждением силовой установки; на фиг 2 представлена принципиальная схема варианта узла пневматической разгрузки мотор-вентиляторов.
Система содержит мотор-вентилятор 1, электрическую линию управления включением мотор-вентилятора 1, включающую переключатель режимов работ 2 автоматический-дистанционный, выключатель дистанционного управления 3. Переключатель режимов работ 2 обеспечивает электрическое включение мотор-вентилятора 1 в автоматическом режиме работы системы, замыкая электрическую цепь - датчик-реле температуры и контакторное устройство 5, обеспечивающее непосредственное включение мотор-вентилятора 1. Выключатель дистанционного управления 3 предназначен для включения мотор-вентилятора 1 в дистанционном режиме работы.
Система содержит также пневматическую линию управления работой мотор-вентилятора 1, которая включает датчик температуры 6, установленный
в трубопроводе теплоносителя и подключенный своим выходным сигналом к регулирующему устройству 7, позиционер 8, связанный с линией питания. Регулирующее устройство 7 последовательно соединено с позиционером 8, где происходит преобразование управляющего сигнала от регулирующего устройства 7 в сигнал управления перемещением мембраны механизма разворота лопастей мотор-вентилятора 1. Система снабжена первым электропневмокла- паном 9 с двумя входами и двумя выходами и вторым электропневмоклапаном 10 с тремя входами и одним выходом, Между первым выходом первого электро- пневмоклапана 9 и первым входом второго электропневмоклапана 10 расположена емкость 11. С вторым выходом первого электропневмоклапана 9 соединен регулируемый дроссель 12, сообщенный с атмосферой. Первый вход первого электропневмоклапана 9 подключен к линии питания позиционера
8,второй вход - к выключателю дистанционного управления 3 второй вход второго электропневмоклапана 10 подсоединен к позиционеру 8, третий
вход - к переключателю режимов работ 2, а выход второго электропневмоклапана 10 - к мембранной полости а мотор-вентилятора 1.
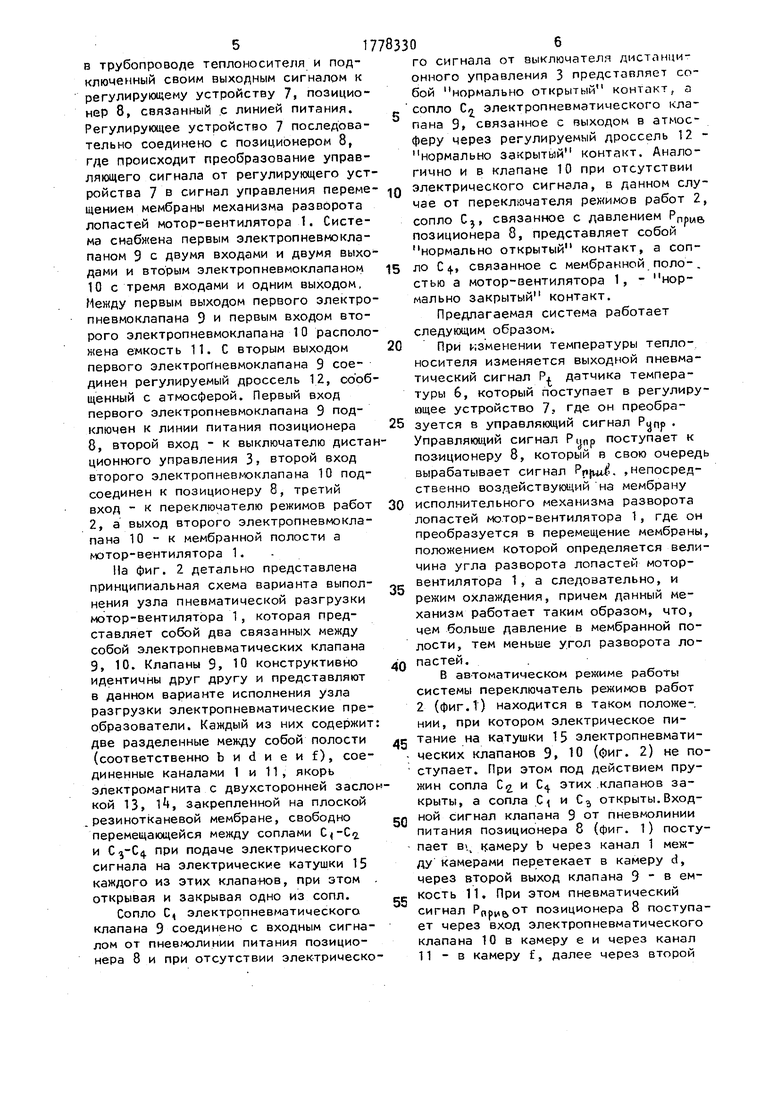
На фиг. 2 детально представлена принципиальная схема варианта выполнения узла пневматической разгрузки мотор-вентилятора 1, которая представляет собой два связанных между собой электропневматических клапана
9,10. Клапаны 9, 10 конструктивно идентичны друг другу и представляют в данном варианте исполнения узла разгрузки электропневматические преобразователи. Каждый из них содержит: две разделенные между собой полости (соответственно Ъ и d и е и f), соединенные каналами 1 и 11, якорь электромагнита с двухсторонней заслонкой 13, 1, закрепленной на плоской
резинотканевой мембране, свободно перемещающейся между соплами Cj-C и . при подаче электрического сигнала на электрические катушки 15 каждого из этих клапанов, при этом . открывая и закрывая одно из сопл.
Сопло С электропневматического клапана 9 соединено с входным сигналом от пневмолинии питания позиционера 8 и при отсутствии электрическо
го сигнала от выключателя дистанционного управления 3 представляет собой нормально открытый контакт, а сопло С« электропневматического клапана 9 связанное с выходом в атмосферу через регулируемый дроссель 12 - нормально закрытый контакт. Аналогично и в клапане 10 при отсутствии электрического сигнала, в данном случае от переключателя режимов работ 2,
5
0
5
0
5
0
5
0
5
сопло С5, связанное с давлением РПрм6 позиционера 8, представляет собой нормально открытый контакт, а сопло С 4. связанное с мембранной поло-, стью а мотор-вентилятора 1, - нормально закрытый контакт.
Предлагаемая система работает следующим образом.
При изменении температуры теплоносителя изменяется выходной пневматический сигнал РА датчика температуры 6, который поступает в регулирующее устройство 7, где он преобразуется в управляющий сигнал РЧПР Управляющий сигнал Рцпр поступает к позиционеру 8, который в свою очередь вырабатывает сигнал . , непосредственно воздействующий на мембрану исполнительного механизма разворота лопастей мотор-вентилятора 1, где он преобразуется в перемещение мембраны, положением которой определяется величина угла разворота лопастей мотор- вентилятора 1, а следовательно, и режим охлаждения, причем данный механизм работает таким образом, что, чем больше давление в мембранной полости, тем меньше угол разворота лопастей.
В автоматическом режиме работы системы переключатель режимов работ 2 (фиг.1) находится в таком положении, при котором электрическое питание на катушки 15 электропневматических клапанов 9, 10 (фиг. 2) не поступает. При этом под действием пружин сопла С Ј и . этих клапанов закрыты, а сопла С и С3 открыты.Входной сигнал клапана 9 от пневмолинии питания позиционера 8 (фиг. 1) поступает в камеру b через канал 1 между камерами перетекает в камеру d, через второй выход клапана 9 - в емкость 11, При этом пневматический сигнал Рприь°т позиционера 8 поступает через вход электропневматического клапана 10 в камеру е и через канал 11 - в камеру f, далее через второй
его выход - в мембранную полость а механизма разворота лопастей мотор- вентилятора 1, при этом управление производительностью мотор-вентилятора 1 осуществляется обычным способом. Таким образом, при автоматическом режиме работы системы включение электропневматических клапанов 9, 10 в систему не оказывает влияния на процесс регулирования, т.к. давлением в мембранной полости а управля- ет Рдрив позиционера 8, но запиранием давления РПит от пневмолинии по-
10
ло С4, емкость 11, камеру d, отк сопло С2 и регулируемый дроссель Проводимостью регулируемого дрос ля 12 определяется время, за кот весь воздух из мембранной полост а выйдет в атмосферу, что обусло постепенное уменьшение давления мембранной полости а и соответст но ему увеличение угла разворота пастей мотор-вентилятора 1 до ма мального.
Таким образом будет произведе пневматическая разгрузка мотор-в
зиционера 8 в емкость 11 достигается .« тилятора 1 в момент его запуска
подготовка к пневматической разгрузке моторгвентилятора 1 при его запуске в дистанционном режиме работы системы.
В дистанционном режиме работы пе- -- реключатель режимов работ 2 находится в таком положении, при котором электрическое питание поступает на катушку 15 электропневматического клапана 10, Тогда под воздействием на- 25 пряженмя на катушке 15 электромагнита к якорю с соплом Cj притягивается заслонка Ik, преодолевая усилие пружины, и тем самым закрывает сопло Cj, одновременно открывая ранее за- эд крытое сопло Ц, при этом перекрывается сигнал РЦВИ& от позиционера 8 и в мембранную полость а мотор-вентилятора 1 поступает ранее запертый в емкости 11 сигнал из пневмолинии питания позиционера 8. Таким образом, в мембранной полости создается максимальное давление, определяющее -минимальный угол разворота лопастей, но при этом мотор-вентилятор 1 не вращается, т.к. выключатель дистанционного управления 3 находится в положение Откл.. Для включения мотора-1 вентилятора 1 в дистанционном режиме необходимо выключатель дистанционного переключения 3 перевести в положение Вкл., при этом замкнется электрическая цепь, связанная с кон- такторным устройством 5}и мотор-вен тилятор 1 начнет вращаться с минимальным углом разворота лопастей. Одновременно начнет подаваться элек: трический сигнал на катушку 15 электропневматического клапана 9 при- этом сопло С (фиг. 2) закроется, а сопло Cj, откроется, тогда из мемб- 55 ранной полости а мотор-вентилятора 1 воздух начнет стравливаться в атмосферу через камеру f, открытое соп35
40
45
50
дистанционном режиме
Применение предлагаемой систе позволит снизить затраты электри ческой энергии на его запуск в д танционном режиме, устранить под ние электрических контакторов, самым повысить надежность и дол ность контактной электрической а ратуры и электродвигателя вентил ра, а также повысить экономичнос всей установки в целом.
Формула изобрете
Система дистанционного и авто ческого управления охлаждением с вой установки, преимущественно т ловоза, содержащая по меньшей ме один мотор-вентилятор, электриче линию управления работой мотор-в лятора, включающую переключатель жимов работ, выключатель дистанц ного управления, контакторное ус ройство, датчики-реле температур пневматическую линию управления той мотор-вентилятора, включающу последовательно соединенные регу ющее устройство, связанное с дат температуры, и позиционер с лини питания, отличающаяся тем, что, с целью повышения долг ности, она снабжена первым элект пневмоклапаном с двумя входами и мя выходами, вторым электронневм клапаном с тремя .входами и одним ходом, емкостью, размещенной меж первым выходом первого электропн клапана и первым входом второго тропневмоклапана, и регулируемым дросселем, соединенным с одной с роны с вторым выходом первого эл тропневмоклапана, а с другой - с мосферой, причем первый вход пер электроклапана подключен к линии
ло С4, емкость 11, камеру d, открытое сопло С2 и регулируемый дроссель 12. Проводимостью регулируемого дросселя 12 определяется время, за которое весь воздух из мембранной полости а выйдет в атмосферу, что обусловит постепенное уменьшение давления в мембранной полости а и соответственно ему увеличение угла разворота лопастей мотор-вентилятора 1 до максимального.
Таким образом будет произведена пневматическая разгрузка мотор-венls« тилятора 1 в момент его запуска
в
5
5
0
5
0
дистанционном режиме
Применение предлагаемой системы позволит снизить затраты электрической энергии на его запуск в дистанционном режиме, устранить подгорание электрических контакторов, тем самым повысить надежность и долговечность контактной электрической аппаратуры и электродвигателя вентилятора, а также повысить экономичность всей установки в целом.
Формула изобретения
Система дистанционного и автоматического управления охлаждением силовой установки, преимущественно тепловоза, содержащая по меньшей мере один мотор-вентилятор, электрическую линию управления работой мотор-вентилятора, включающую переключатель режимов работ, выключатель дистанционного управления, контакторное устройство, датчики-реле температуры, пневматическую линию управления работой мотор-вентилятора, включающую последовательно соединенные регулирующее устройство, связанное с датчиком температуры, и позиционер с линией питания, отличающаяся тем, что, с целью повышения долговечности, она снабжена первым электро- пневмоклапаном с двумя входами и двумя выходами, вторым электронневмо- клапаном с тремя .входами и одним выходом, емкостью, размещенной между первым выходом первого электропневмо- клапана и первым входом второго элек-, тропневмоклапана, и регулируемым дросселем, соединенным с одной стороны с вторым выходом первого элек- тропневмоклапана, а с другой - с атмосферой, причем первый вход первого электроклапана подключен к линии питания позиционера, второй вход - к выключателю дистанционного управления, второй вход второго электро- пневмоклапана подсоединен к позициоГО
т Ј
неру, третий вход - к переключателю режимов работ, а выход второго элек- тропневмоклапана - к мотор- вентилятору.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования температуры теплоносителя двигателя внутреннего сгорания | 1991 |
|
SU1813893A1 |
| Физиотерапевтическое устройство В.Н.Поздникова для воздействия лекарством-запахом | 1989 |
|
SU1648486A1 |
| Устройство управления запорным краном трубопровода | 1972 |
|
SU437875A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2006 |
|
RU2327203C2 |
| Устройство для автоматической поверки и настройки преобразователей давления | 1987 |
|
SU1530959A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ШАРОВЫХ КРАНОВ С УСТРОЙСТВОМ РЕГУЛИРОВАНИЯ МАКСИМАЛЬНОГО ДВИЖУЩЕГО МОМЕНТА | 2004 |
|
RU2253049C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2008 |
|
RU2374092C1 |
| ПОЗИЦИОНЕР ПРИВОДНОГО МЕХАНИЗМА | 2012 |
|
RU2489606C1 |
| Многопозиционный электропневматический привод | 1981 |
|
SU954643A1 |
| ДИСКРЕТНОЕ ЗАПОРНО-РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2037178C1 |

Использование: изобретение относится к автоматизации двигательных установок, в частности к системам автоматического регулирования производительности мотор-вентилятора, и может быть использовано для дистанционного и автоматического управления охлаждением силовой установки. Цель: повышение надежности. Сущность изобретения: система содержит мотор-вентилятор, электрическую цепь управления мотор-вентилятором с переключателем режимов работ и выключателем дистанционного управления, датчиком реле-температуры и контакторным устройством. Система содержит также пневматическую линию, включающую датчик температуры, подключенный своим выходным сигналом к регулирующему устройству, позиционер. Система снабжена первым электропневмоклапаном с двумя входами и двумя выходами и вторым электропневмоклапаном с тремя входами и одним выходом. Между первым выходом электропневмоклапана и первым входом второго электропневмоклапана расположена емкость. С вторым выходом первого электропневмоклапана соединен регулируемый дроссель, сообщенный с атмосферой. Первый вход электропневмокдапана подключен к линии питания позиционера, второй вход - к выключателю дистанционного управления, второй вход электропневмоклапана подсоединен к позиционеру, третий вход - к переключателю режимов работ, а выход второго электропневмоклапана - к мембраннбй полости а мотор-вентилятора. Система позволяет произвести пневматическую разгрузку мотор-вентилятора в момент его запуска в дистанционном режиме, произвести запуск мотор-вентилятора с ми« нимальным углом разворота лопастей. Положительный эффект: снижение аэродинамического сопротивления, минимальные затраты энергии при запуске, повышение надежности и долговечности пусковой контактной электрической аппаратуры. 2 ил. VI 00 со W о
Фиг.2.
| Филонов С„П | |||
| и др | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Транспорт, 1985, с | |||
| 0 |
|
SU291291A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического регулирования температуры | |||
| Инструкция по эксплуатации и техническое описание | |||
| Ворошиловград, 1987, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| ( СИСТЕМА ДИСТАНЦИОННОГО И АВТОМАТ ТИЧЕСКОГО УПРАВЛЕНИЯ ОХЛАЖДЕНИЕМ СИЛОВОЙ УСТАНОВКИ | |||
