XJ
XJ
00
Изобретение относится к мэшино- стро,енига и может быть использовано в автоматизированном производственном транспорте, поворотных устройствах, лифтах, промышленных роботах, металлорежущих станках и пр., преимущественно в тех случаях, когда необходимо обеспечить ис- полнительномуоргану разгон иторможение с изменением скорости по синусоидальному закону при наличии участка движения с постоянной скоростью при жестких требованиях к точности позиционирования,
Цель изобретения - расширение технологических возможностей за счет обеспечения гибкого изменения шага, исключение инерционных нагрузок в начале и конце цикла.
Использование изобретения позволит значительно снизить затраты и время на переналадку транспорта автоматизированных линий при переходе на выпуск новых изделий, а также за счет исключения инерционных нагрузок в начале и конце цикла увеличить среднюю скорость транспорта и точность позиционирования.
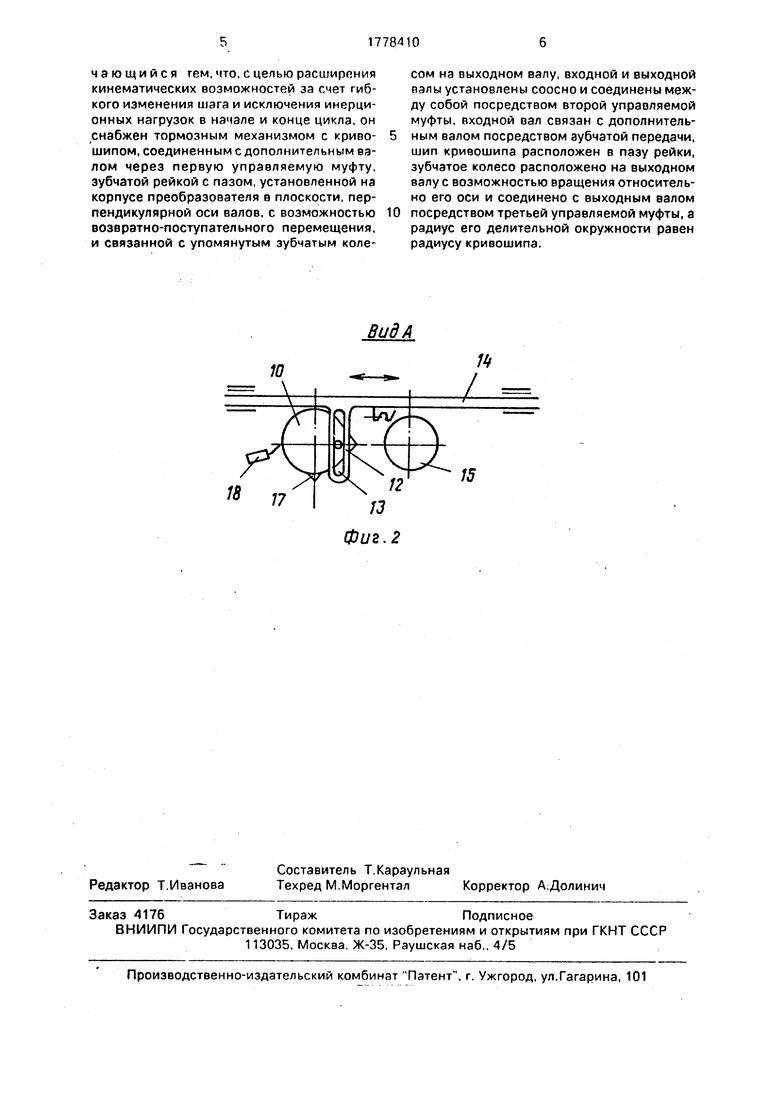
На фиг.1 изображена кинематическая схема привода; на фиг.2 - вид А на фиг.1.
Привод шагового перемещения содержит двигатель 1, соединенный с редуктором 2, п преобразователь 3.
В общем корпусе преобразователя 3 расположены входной вал А и выходной вал 5, смонтированные на одной оси и соединенные друг с другом посредством электромагнитной муфты 6, и дополнительный вал 7, связанный с входным валом посредством зубчатой передачи 8 с передаточным отношением 1.
С дополнительным валом посредством электромагнитной муфты 9 сопряжен с возможностью вращения относительно его оси кривошип 10 с тормозным механизмом 11. Шип 12 кривошипа расположен в пазу 13 рейки 14, смонтированной на корпусе преобразователя 3 в плоскости, перпендикулярной оси валов, с возможностью возвратно-поступательного перемещения, Рейка находится в постоянном зацеплении с зубчатым колесом 15, расположенным на выходном валу 5 с возможностью вращения относительно его оси и соединяемым с валом посредством электромагнитной муфты 16. На цилиндрической поверхности кривошипа расположены с возможностью регулировки упоры 17, взаимодействующие с выключателем 18, смонтированным на корпусе, Радиус делительной окружности зубчатого колеса 15 равен радиусу кривошипа 10.
Привод работает следующим образом.
Вал 4, являясь входным (ведущим), посредством зубчатой передачи 8 вращает вал 7. Электромагнитные муфты 8, 9 и 16 разомкнуты (выключены). При подаче сигнала на
начало движения исполнительного органа включаются электромагнитные муфты 9 и 16, тормозной механизм 11 кривошипа 10 растормаживается. Кривошип начинает вращаться с постоянной скоростью и по0 средством шипа 12, находящегося в пазу 13 рейки 14, перемещает рейку и соответственно вращает зубчатое колесо 15 и вал 5.
Скорость вращения зубчатого колеса 15, вала 5 и, таким образом, исполнительно5 го органа при повороте кривошипа на 90° изменяется по синусоидальному закону от О до заданной. При завершении поворота кривошипа на 90° упор 17 взаимодействует с выключателем 18, что ведет к срабатыва0 нию тормозного механизма, выключению электромагнитных муфт 9 и 16 и включению электромагнитной муфты 6.
Выходной вал 5 начинает вращаться с постоянной скоростью, обеспечивая равно5 мерное движение исполнительному органу. При подходе исполнительного органа к месту остановки на электромагнитные муфты 6, 9 и 16 поступает сигнал на окончание движения, при этом отключается электро0 магнитная муфта 6, растормаживается тормозной механизм 11, включаются управляемые муфты 9 и 16, чем обеспечивается вращение кривошипа 10 с постоянной скоростью. Шип 12 приводит в движение
5 рейку 14, при этом начинают вращаться зубчатое колесо 15, вал 5 и соответственно исполнительный орган. Скорость вращения изменяется по синусоидальному закону от заданной скорости до 0 при повороте кри0 вошипа на следующие 90°. «
Останов кривошипа осуществляется, взаимодействием следующего упора 17 с кон- цевым выключателем 18. При этом срабатывает тормозной механизм 11 и выключаются
5 управляемые муфты 9 и 16. Исполнительный орган останавливается.
При реверсировании двигателя все процессы осуществляются в обратной последовательности, обеспечивая исполнительному
0 органу перемещение в обратном направлении.
Формула изобретения Универсальный привод шагового перемещения, содержащий электродвигатель,
5 редуктор и преобразователь непрерывного вращательного движения в прерывистое, выполненный в виде корпуса с расположенными в нем входным, выходным и дополнительным валами и зубчатым колесом, установленным на выходном валу, о т л и чающийся гем, что, с целью расширения кинематических возможностей за счет гибкого изменения шага и исключения инерционных нагрузок в начале и конце цикла, он снабжен тормозным механизмом с кривошипом, соединенным с дополнительным валом через первую управляемую муфту, зубчатой рейкой с пазом, установленной на корпусе преобразователя в плоскости, перпендикулярной оси валов, с возможностью возвратно-поступательного перемещения, и связанной с упомянутым зубчатым коле0
сом на выходном валу, входной и выходной палы установлены соосно и соединены между собой посредством второй управляемой муфты, входной вал связан с дополнительным валом посредством зубчатой передачи, шип кривошипа расположен в пазу рейки, зубчатое колесо расположено на выходном валу с возможностью вращения относительно его оси и соединено с выходным валом посредством третьей управляемой муфты, а радиус его делительной окружности равен радиусу кривошипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2005 |
|
RU2308603C2 |
| Привод перемещения исполнительного органа прецизионной делительной машины | 1973 |
|
SU776865A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Перемешивающее устройство с прерывистым движением рабочего органа | 2019 |
|
RU2727955C1 |
| Возвратно-вращательное перемешивающее устройство | 2016 |
|
RU2616655C1 |
| Перемешивающее устройство с неравномерным движением рабочего органа | 2020 |
|
RU2779980C2 |
| Возвратно-вращательное перемешивающее устройство | 2016 |
|
RU2616656C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1996 |
|
RU2146212C1 |
Изобретение относится к области машиностроения. Цель изобретения - расширение кинематических возможностей привода. Привод содержит электродвигатель 1, редуктор 2 и преобразователь 3, выполненный в виде корпуса с расположенными в нем входным 4 и выходными 5 валами, смонтированными на одной оси и соединенными посредством управляемой муфты 6, и дополнительным валом 7, связанным с входным посредством зубчатой передачи 8 с отношением 1. С дополнительным валом 7 посредством управляемой муфты 9 сопряжен с возможностью вращения относительно его оси кривошип 10с тормозным устройством 11. Шип кривошипа 10 расположен в пазу рейки 14, смонтированной на корпусе в плоскости, перпендикулярной оси валов 4, 5 и 7, с возможностью возвратно- поступательного перемещения. Рейка находится в постоянном зацеплении с зубчатым колесом 15, расположенным на выходном валу 5 и соединяемым С валом посредством управляемой муф ты 16, на цилиндрической поверхности кривошипа 10 расположены с возможностью регулировки упоры, взаимодействующие с концевым выключателем, смонтированным на корпусе. Радиус делительной окружности зубчатого колеса 15 равен радиусу кривошипа 10. 2 ил. сл d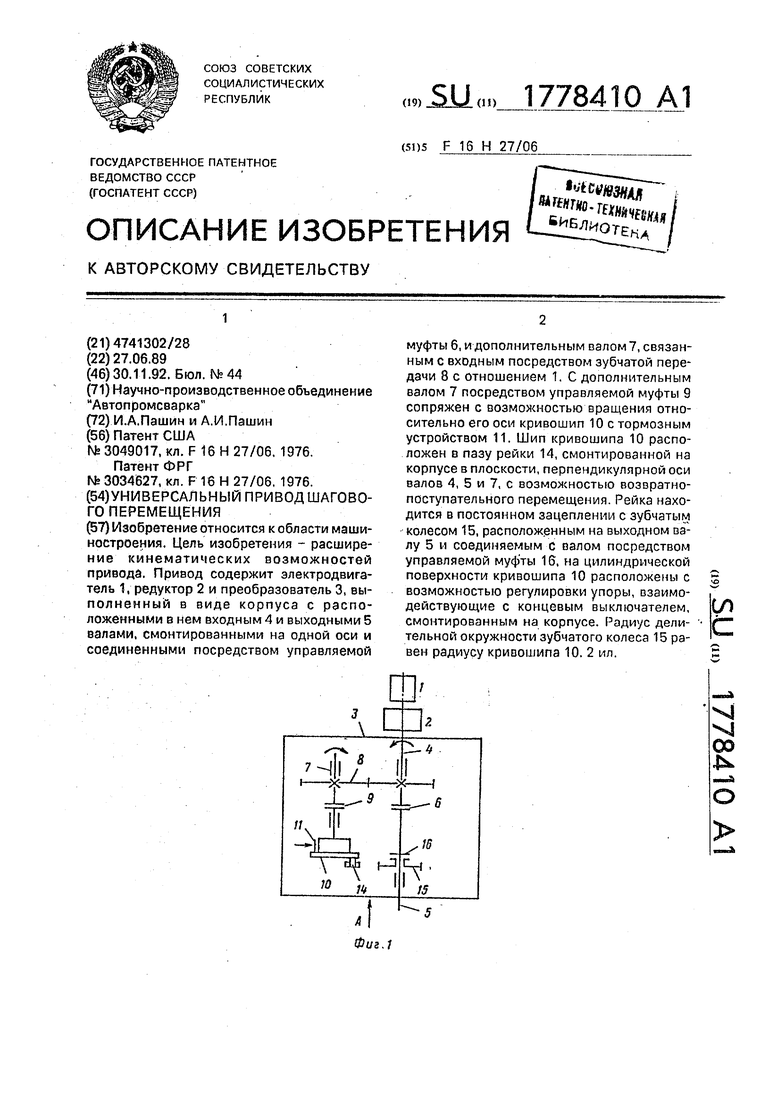
Фиг. 2
Вид А
15
| Патент США № 3049017, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Патент ФРГ № 3034627, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
