СП
со Ч



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля внутреннего диаметра трубы | 1990 |
|
SU1798612A1 |
| Устройство для контроля диаметра детали | 1991 |
|
SU1825957A1 |
| Устройство контроля прямолинейности образующей цилиндрической детали | 1990 |
|
SU1749697A1 |
| Накладной кругломер | 1987 |
|
SU1471061A1 |
| Устройство для автоматизированного контроля соосности и центровки механических конструкций | 2016 |
|
RU2639993C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ОТВЕРСТИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2194244C2 |
| Способ изготовления внутреннего отверстия в трубе при помощи расточного устройства | 2024 |
|
RU2839745C1 |
| Устройство для измерения внутреннего диаметра трубы | 1985 |
|
SU1305523A1 |
| Устройство для измерения диаметра цилиндра двигателя внутреннего сгорания | 1980 |
|
SU868307A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДЕТАЛЕЙ | 1998 |
|
RU2187068C2 |


Изобретение относится к измерительной технике, связанной с контролем отклонения от прямолинейности образующих цилиндрических деталей, и может быть использовано для автоматизированного контроля прямолинейности внутренних образующих длинномерных труб. Цель изобретения - обеспечение возможности использованияустройствадля автоматизированного контроля внутренней образующей длинномерных труб и повышение точности контроля. Поставленная цель достигается тем, что а устройстве дополнительно установлена штанга, соединенная с корпусом посредством узла развязки в виде карданного подвеса, механизм осевого перемещения штанги с датчиком пройденного пути, механизм вращения цилиндрической детали с датчиком угла поворота, блок обработки сигналов, снимаемых сдатчиков, причем базовые опоры выполнены в виде двух колец в форме усеченного тора с внешним диаметром, меньшим внутреннего диаметра контролируемой детали, датчик касания выполнен в виде подпружиненного штока с возможностью осевого перемещения и установлен перпендикулярно оси корпуса на фиксированном расстоянии между кольцами базовых опор, датчик перемещения выполнен в виде закрепленной одним концом в корпусе упругой консольной балки в форме пластины, на обеих поверхностях которой осесимметрично укреплены четыре тензорезистора, при этом свободный конец консольной балки подпружинивает внутренний конец штока, выполненный в виде полусферы. 5 ил. (Л С VI оо
Изобретение относится к измерительной технике, связанной с контролем отклонения от прямолинейности образующих цилиндрических деталей, и может быть использовано для автоматизированного контроля прямолинейности внутренних образующих длинномерных труб.
Известно устройство, содержащее корпус, два датчика перемещения, установленные на корпусе, два датчика касания, выполненные в виде движка с цапфой и роликом на одном конце и расположенной по середине движка второй цапфы, с которой взаимодействуют вилкообразные плечи двуплечих рычагов, на вторых плечах которых установлены ролики, взаимодействующие с помощью серьги с плечом другого рычага, образуя Z-образное шарнирное соединение, контактирующее с подпружиненным тросом, причем два кинематически несвязанных троса соединены одними концами с корпусом, а другими -с соответствующим датчиком перемещения. Недостатком данного устройства является сложность конструкции, наличие опосредованной связи между датчиками касания и датчиками перемещения в в йде тросовых соединений, подпружиниваемых рядом роликов, расположенных на рычагах. Последнее обстоятельство приводит к увеличению погрешностей измерений. Кроме того, в данном устройстве отсутствует возможность увязки контролируемого отклонения образующей от линейности с линейной координатой, связанной с осью трубы, а также отсутствует возможность вращения контролируемой трубы вокруг собственной оси и определения ее угла поворота. Таким образом рассматриваемое устройство обладает сравнительно низкой точностью измерений, ограниченными функциональными возможностями и не может быть практически использовано для автоматизированного контроля труб с малым диаметром.
Наиболее близким по технической сущности к изобретению является устройство, содержащее корпус, на его торцах базовые опоры установлены так, что центр тяжести устройства расположен в плоскости, равноудаленной or базовых опор, причем базовые опоры выполнены в виде соосно установленных подшипников качения.
Данное устройство не обладает возможностью автоматизации контроля, это связано с тем, что в нем отсутствуют механизм осевого перемещения корпуса и механизм вращения трубы с указателями соответствующих перемещений. К тому же при многократном передвижении корпуса вдоль образующей происходит разбивка подшипников качения при установке их соосно с корпусом, что обуславливает увеличение погрешностей измерений за счет наличия люфтов в узлах базовых опор. Последнее обстоятельство приводит к ограничению возможности использования данногб устройства только для контроля полых цилиндрических деталей, длина которых ,сравнима с расстоянием между базовыми опорами. В случае же установки подшипников качения так, что их оси будут перпендикулярны оси корпуса, осложняется передвижение последнего в полости контролируемой цилиндрической детали в процессе вращения последней вокруг собственной оси. При этом также происходит разбивка подшипников качения при многократном выполнении измерительных операций и в конечном итоге уменьшается
точность измерений из-за наличия люфтов в базовых опорах. Следовательно, рассматриваемое устройство обладает ограниченными функциональными возможностями и не позволяет выполнять автоматизирован0 ный контроль внутренних образующих длинномерных цилиндрических деталей с достаточно высокой точностью измерений. Целью изобретения является обеспечение возможности использования устройст5 ва для автоматизированного контроля внутренней образующей длинномерных труб и повышение точности контроля.
Поставленная цель достигается благодаря тому, что известное устройство, содер0 жащее корпус, установленные на его торцах базовые опоры и отсчетные узлы, а центр тяжести корпуса расположен в плоскости, равноудаленной от базовых опор, согласно изобретению, снабжено штангой, соеди5 пенной с корпусом посредством узла развязки, выполненного в виде карданного подвеса, механизмом осевого перемещения шганги с датчиком пройденного пути, механизмом вращения контролируемой детали с
0 датчиком углового поворота и блоком обработки сигналов датчиков, базовые опоры выполнены в виде двух колец в форме усеченного тора, отсчетные узлы выполнены в виде датчиков касания и линейного переме5 щения, при этом датчик перемещения выполнен в виде закрепленной одним концом в корпусе консольной балки в форме пластинки, на обеих поверхностях которой осе- симметрично установлены четыре
0 тензорезистора, а датчик касания - в виде штока, установленного в корпусе перпендикулярно его оси на фиксированном расстоянии между кольцами базовых опор, а его внутренний конец, выполненный в виде по5 лусферы, подпружинен свободным концом балки.
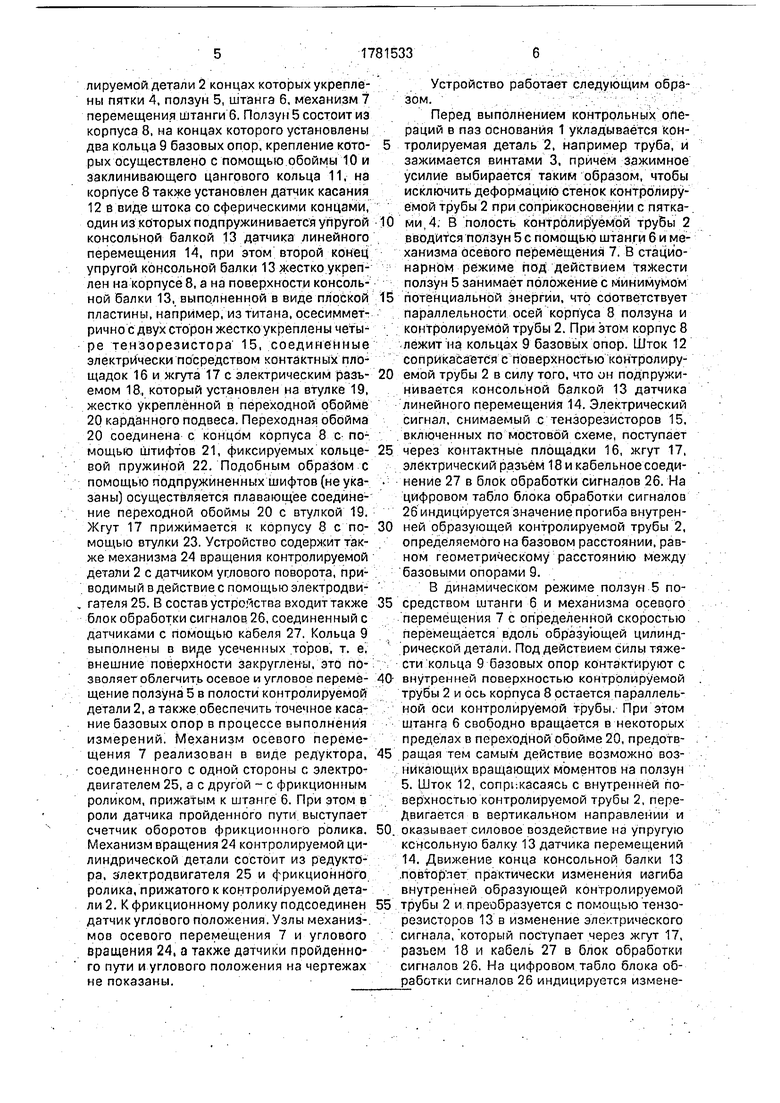
На фиг. 1 показан общий вид устройства; на фиг. 2 - узел крепления контролируемой детали на станине, вид по стрелке А; на
0 фиг. 3 - ползун с базовыми опорами и с элементами соединения со штангой; на фиг. 4 - ползун со штангой, общий вид; на фиг. 5 - датчик линейного перемещения.
Устройство контроля отклонения от
5 прямолинейности внутренней образующей цилиндрической детали содержит основание 1 с V-образным пазом для контролируемой цилиндрической детали 2, установленные на конце основания два при- жимных винта 3, на обращенных к контролируемой детали 2 концах которых укреплены пятки А, ползун 5, штанга 6, механизм 7 перемещения штанги 6. Ползун 5 состоит из корпуса 8, на концах которого установлены два кольца 9 базовых опор, крепление кото- рых осуществлено с помощью обоймы 10 и заклинивающего цангового кольца 11, на корпусе 8 также установлен датчик касания 12 в виде штока со сферическими концами, один из которых подпружинивается упругой консольной балкой 13 датчика линейного перемещения 14, при этом второй конец упругой консольной балки 13 жестко укреплен на корпусе 8, а на поверхности консольной балки 13, выполненной в виде плоской пластины, например, из титана, осесиммет- рично с двух сторон жестко укреплены четы- ре тензорезистора 15, соединенные электрически посредством контактных площадок 16 и жгута 17с электрическим разъ- емом 18, который установлен на втулке 19, жестко укрепленной в переходной обойме 20 карданного подвеса. Переходная обойма 20 соединена с концом корпуса 8 с помощью штифтов 21, фиксируемых кольце- вой пружиной 22. Подобным образом с помощью подпружиненных шифтов (не ука- заны) осуществляется плавающее соединение переходной обоймы 20 с втулкой 19. Жгут 17 прижимается к корпусу 8 с по- мощью втулки 23. Устройство содержит также механизма 24 вращения контролируемой детали 2 с датчиком углового поворота, приводимый в действие с помощью электродвигателя 25. В состав устройства входит также блок обработки сигналов 26, соединенный с датчиками с помощью кабеля 27. Кольца 9 выполнены в виде усеченных торов, т, е. внешние поверхности закруглены, это позволяет облегчить осевое и угловое переме- щение ползуна 5 в полости контролируемой детали 2, а также обеспечить точечное касание базовых опор в процессе выполнения измерений. Механизм осевого перемещения 7 реализован в виде редуктора, соединенного с одной стороны с электродвигателем 25, а с другой - с фрикционным роликом, прижатым к шганге 6. При этом в роли датчика пройденного пути выступает счетчик оборотов фрикционного ролика. Механизм вращения 24 контролируемой цилиндрической детали состоит из редуктора, электродвигателя 25 и фрикционного ролика, прижатого к контролируемой детали 2. К фрикционному ролику подсоединен датчик углового положения. Узлы механизмов осевого перемещения 7 и углового вращения 24, а также датчики пройденного пути и углового положения на чертежах не показаны.
Устройство работает следующим образом.
Перед выполнением контрольных операций в паз основания 1 укладывается контролируемая деталь 2, например труба, и зажимается винтами 3, причем зажимное усилие выбирается таким образом, чтобы исключить деформацию стенок контролируемой трубы 2 при соприкосновен,ии с пятками 4. В полость контролируемой трубы 2 вводится ползун 5 с помощью штанги 6 и механизма осевого перемещения 7. В стационарном режиме под действием тяжести ползун 5 занимает положение с минимумом потенциальной энергии, что соответствует параллельности осей корпуса 8 ползуна и контролируемой трубы 2. При этом корпус 8 лежит на кольцах 9 базовых опор. Шток 12 соприкасается с поверхностью контролируемой трубы 2 в силу того, что он подпружинивается консольной балкой 13 датчика линейного перемещения 14. Электрический сигнал, снимаемый с тензорезисторов 15, включенных по мостовой схеме, поступает через контактные площадки 16, жгут 17, электрический разъем 18 и кабельное соединение 27 в блок обработки сигналов 26. На цифровом табло блока обработки сигналов 26 индицируется значение прогиба внутренней образующей контролируемой трубы 2, определяемого на базовом расстоянии, равном геометрическому расстоянию между базовыми опорами 9.
В динамическом режиме ползун 5 посредством штанги 6 и механизма осевого перемещения 7 с определенной скоростью перемещается вдоль образующей цилиндрической детали. Под действием силы тяжести кольца 9 базовых опор контактируют с внутренней поверхностью контролируемой трубы 2 и ось корпуса 8 остается параллельной оси контролируемой трубы. При этом штанга 6 свободно вращается в некоторых пределах в переходной обойме 20, предотвращая тем самым действие возможно возникающих вращающих моментов на ползун 5. Шток 12, соприкасаясь с внутренней поверхностью контролируемой трубы 2, передвигается в вертикальном направлении и оказывает силовое воздействие на упругую консольную балку 13 датчика перемещений 14. Движение конца консольной балки 13 повторяет практически изменения изгиба внутренней образующей контролируемой трубы 2 и преобразуется с помощью тензорезисторов 13 в изменение электрического сигнала, который поступает через жгут 17, разъем 18 и кабель 27 в блок обработки сигналов 26. На цифровом табло блока обработки сигналов 26 индицируется изменение прогиба внутренней образующей контролируемой трубы 2. При этом с датчика пройденного пути механизма осевого перемещения 7 поступает сигнал, свидетельствующий о линейной координа- те расположения ползуна 5 на оси контролируемой трубы 2. В результате обработки этого сигнала на втором цифровом табло блока обработки сигналов 26 индицируется значение линейной координаты положения ползуна 5 на оси контролируемой трубы 2. Ослабляя винтами 3 зажим контролируемой трубы 2, с помощью механизма вращения 24, осуществляют поворот трубы на некоторый угол и повторяют указанный цикл измерений, перемещая с помощью механизма 7 осевого перемещения ползун 5 вдоль новой образующей. При этом сигнал с датчика угла поворота поступает в блок обработки сигналов 26 и на третьем цифро- ёом табло индицируется угловая координата контролируемой образующей.
Формула изобрето- ния Устройство для контроля отклонений от прямолинейности, содержащее корпус, установленные на его торцах базовые опоры и отсчетные узлы, а центр тяжести корпуса
I hsyjvr v bЈ3 s:5-ЈX j у л, v лтт
У/У////////777/7//У///////Щ П
fW/ дид/f
расположен в плоскости, равноудаленной от базовых опор, отличающееся тем, что, с целью обеспечения возможности использования его для автоматизированного контроля внутренней образующей длинномерных труб и повышения точности, оно снабжено штангой, соединенной с корпусом посредством узла развязки, выполненного в виде карданного подвеса, механизмом осевого перемещения штанги С датчиком пройденного пути, механизмом вращения контролируемой детали с датчиком углового поворота и блоком обработки сигналов датчиков, базовые опоры выполнены в виде двух колец в форме усеченного тора, отсчетные узлы выполнены в виде датчиков касания и линейного перемещения, при этом датчик перемещения выполнен в виде закрепленной одним концом в корпусе упругой консольной балки в форме пластинки, на обеих поверхностях которой осесимметрично установлены четыре тензо- резистора, а датчик касания - в виде штока, установленного в корпусе перпендикулярно его оси на фиксированном расстоянии между кольцами базовых опор, а его внутренний конец, выполненный в виде полусферы, подпружинен свободным концом балки.
Э
(pt/s.g
yj /9 /7 #9 fl гз g
S 8
| Авторское свидетельство СССР № 1546831 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения отклонений от прямолинейности | 1986 |
|
SU1392337A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
