сл
с

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| Комплекс для определения инерционных характеристик с измерительной системой | 2017 |
|
RU2683800C2 |
| УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 2005 |
|
RU2311624C2 |
| Способ определения статической устройчивости транспортных средств | 2022 |
|
RU2788539C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2003 |
|
RU2247318C2 |
| Устройство для определения инерционных характеристик протяженных изделий | 2017 |
|
RU2697442C2 |
| Стенд для определения массоцентровочных характеристик изделий больших масс | 2016 |
|
RU2655726C2 |
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 2011 |
|
RU2483283C2 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485466C1 |
Изобретение относится к машиностроению и может использоваться для определения массы и координат центра масс изделий. Цель изобретения - повышение точности за счет исключения погрешностей базирования и расширение функциональных возможностей за счет обеспечения возможности определения вертикальной координаты центра масс изделия. Для этого устройство для определения координат цен-% тра масс изделия, содержащее основание, на котором размещены три силоизмери- тельных узла с опорами и грузоприемными шарнирами, снабжено механизмом перемещения одной из опор вдоль оси, перпендикулярной основанию, и переходником с тремя базовыми отверстиями для базирования контролируемого изделия и грузопри- емных шарниров. Опоры размещены на силоизмерительных узлах с возможностью перемещения в плоскости, параллельной основанию. 4 ил.
Изобретен ле относится к машиностроению, а именно к устройствам для определения координат центра масс. Устройство может быть использовано в измерительной технике для определения массы и координат центра масс преимущественно крупногабаритных изделий.
В устройстве, принятом за прототип, применены трое весов со специальными опорами, о/ на из которых установлена неподвижно, вторая - с возможностью перемещения вдоль оси, соединяющей эти опоры, а третья - с возможностью перемещения в горизонтальной плоскости в двух взаимно перпендикулярных направлениях, причем опоры связаны с переходником для установки издилия через сферы.
Такая конструкция позволяет избежать возникновения невертикальных сил при
взвешивании, однако устройство обладает рядом недостатков, к которым относятся сравнительно низкая точность измерений и ограниченные технологические возможности, не обеспечивающие определение вертикальной координаты центра масс изделия.
Сравнительно низкая точность измерений объясняется особенностями конструкции известного устройства, состоящими в способе закрепления сфер, BsanMOfleucfSy- гощих с переходником изделия. Эти сферы закреплены на опорах устройства и могут изменять свое положение по отношению к переходнику, на котором зафиксировано изделие, что приводит к смещению системы координат стенда относительно системы координат изделия, снижая тем самым точность измерений.
00
СЛ XJ
О
Ограниченные технологические возможности известного устройства объясняются двумя причинами. Во-первых, это большое расстояние по высоте от опорной плоскости сфер до опорной плоскости по- ддичсных частей опор, что снижает устойчивость опор и делает невозможным наклон изделия ввиду возможности его опрокиду- рания. Другая причина состоит в особенностях конструкции устройства, приводящих к перемещению переходника с изделием по сферическим4бпбрам при наклоне, что при- подит к ошибкам в Й|мерениях и может вызвать с оскалГз ъТв1Гнй е переходника со сферических опор при увеличении угла на- клона. Эти особенности конструкции устройства не позволяют осуществить наклон изделия, необходимый для определения вертикальной координаты центра масс, что снижает его технологические возможности.
Целью изобретения является повышение точности определения координат центра масс и расширение технологических возможностей устройства за счет определения вертикальной координаты центра масс.
Поставленная цель достигается тем, что в устройстве содержится трое весов с опорами, взаимодействующими через сферы с оснасткой изделия, при этом одна сфера опирается на неподвижную опору, вторая - на подвижную, которая обеспечивает горизонтальное перемещение вдоль оси, проходящей черет центры первой и второй сфер. Третья сфера опирается на подвижную часть неподвижной опоры, обеспечиваю- щую свободное перемещение в горизонтальной плоскости.
Новым является то, что в состав устройства введен механизм вертикального перемещения третьей опоры и оснастка для установки изделия выполнена в виде калиброванного переходника, в котором имеются три базовых отверстия под штоки с опорными сферами. Кроме того, опорная човерх- ност ь первой опоры и опорные поверхности подвижных частей второй и третьей опор, которые взаимодействуют со сферами и с неподвижными частями опор (через подшипники качения, скольжения, магнитные, аэростатические и др.) выполнены в одной горизонтальной плоскости. Совме щение всех перечисленных плоскостей в одну позволяет исключить возникновение опрокидывающих моментов, повысить устойчивость опор и дает возможнбсть осу- ществить наклон изделия с помощью механизма вертикального перемещения третьей опоры, что делает возможным определение вертикальной координаты центра масс на данном устройстве.
Калиброванная оснастка повышает точность определения координат центра масс.
Следовательно, введение новых отличительных признаков позволяет осуществить поставленную цепь изобретения, обеспечивает получение положительного эффекта и соответствует критерию изобретения.
При проведении патентного поиска авторами не были обнаружены технические решения с аналогичной совокупностью признаков.
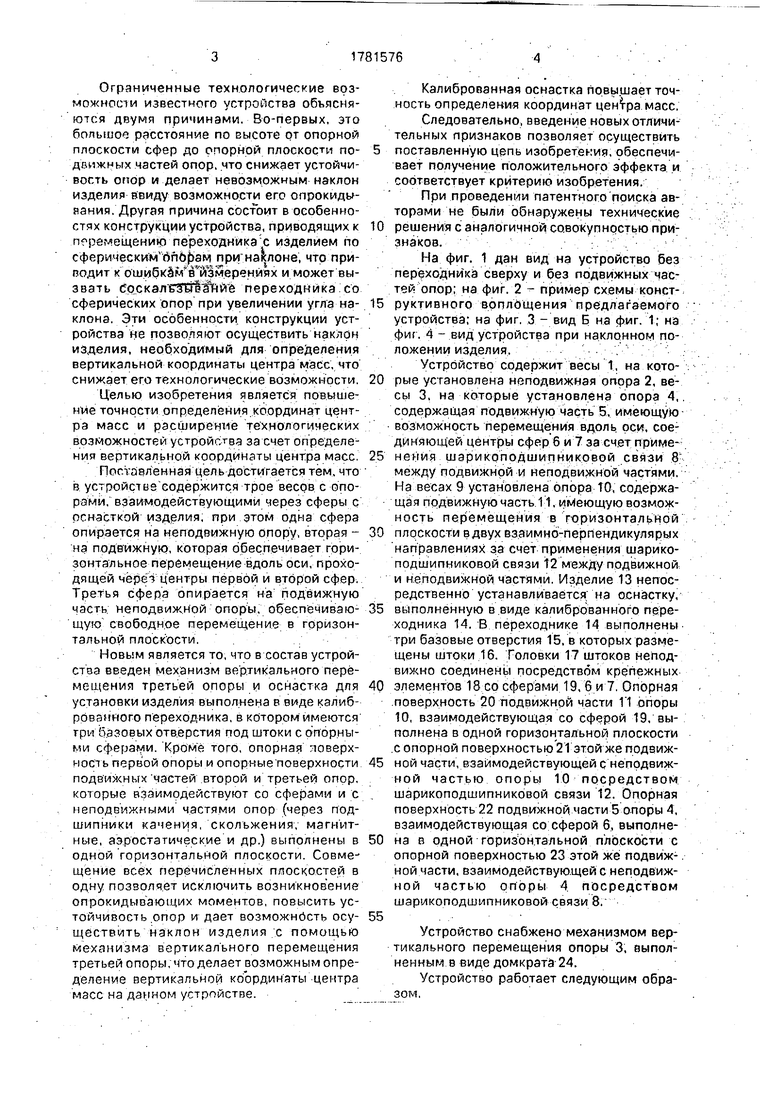
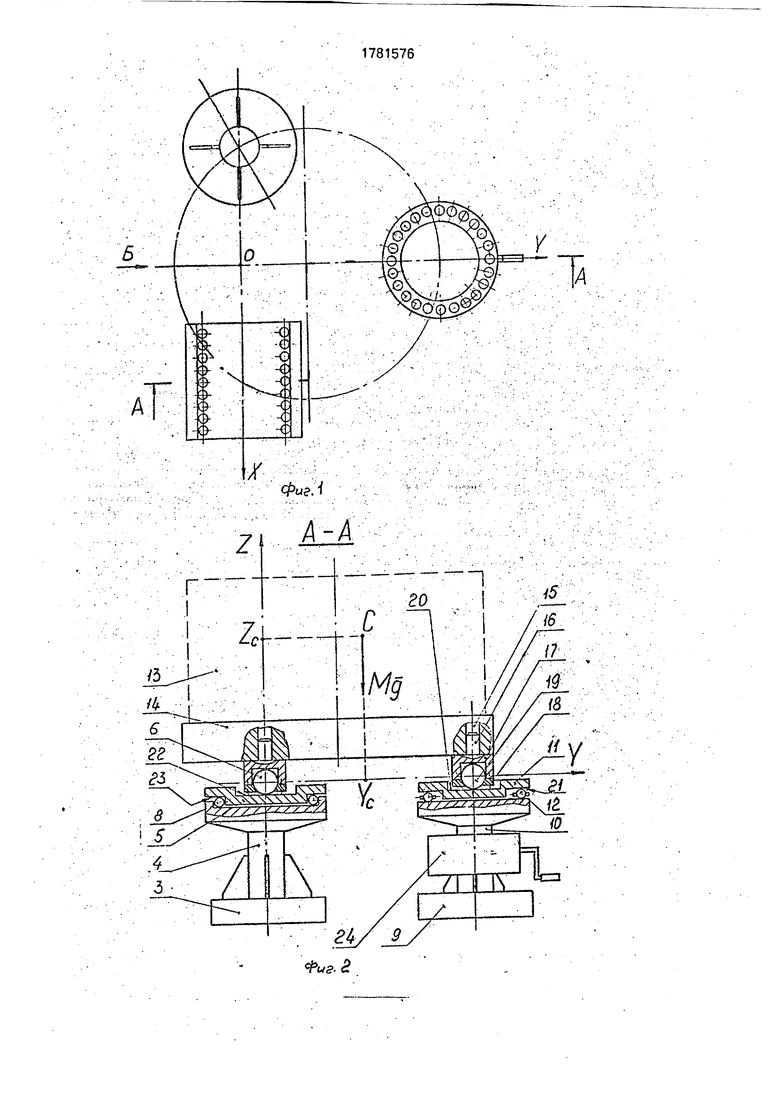
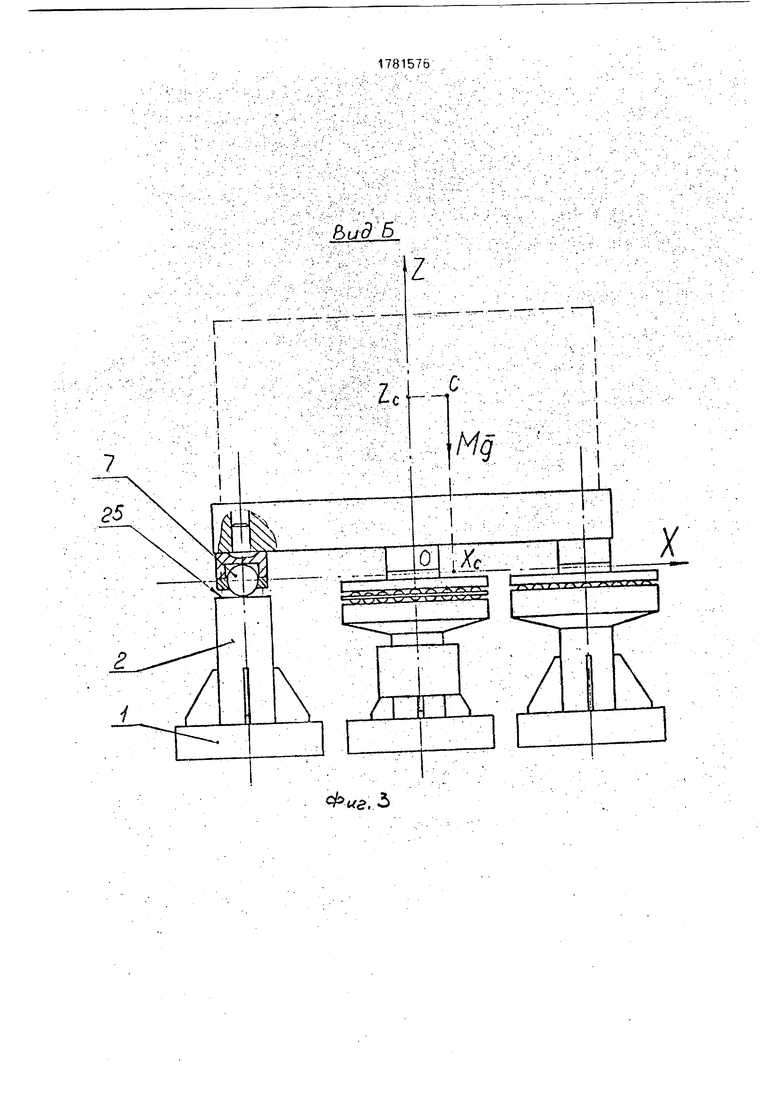
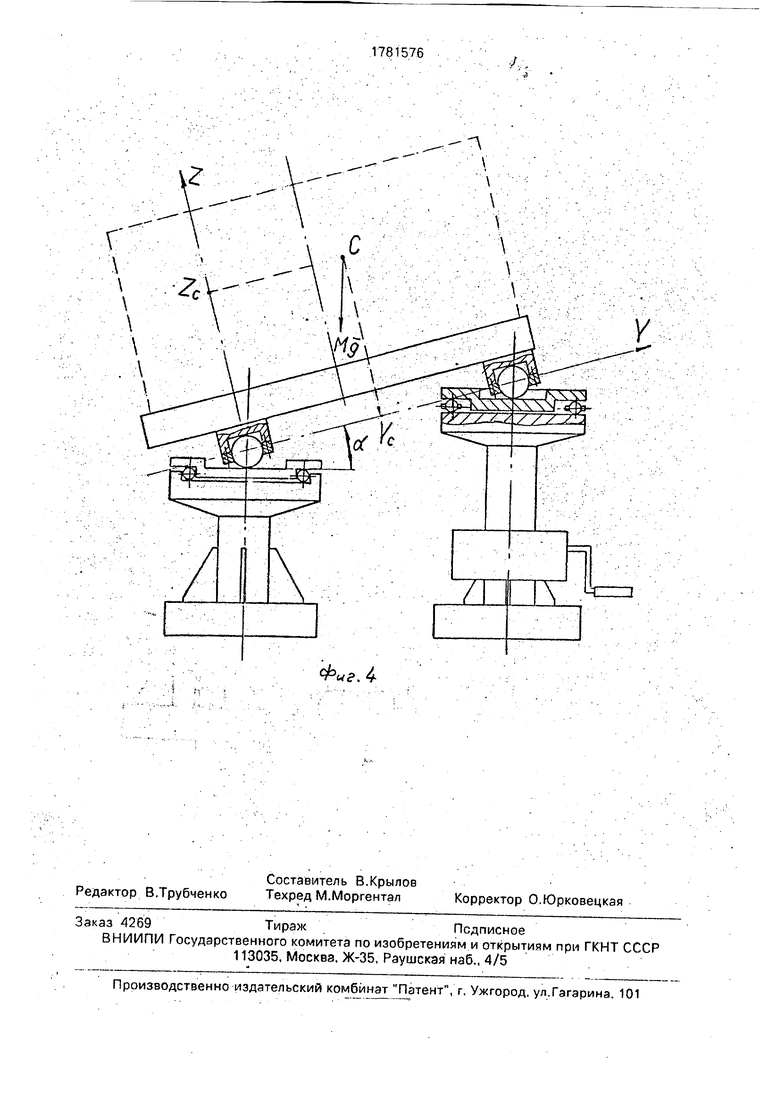
На фиг. 1 дан вид на устройство без переходника сверху и без подвижных частей опор; на фиг. 2 - пример схемы конструктивного воплощения предлагаемого устройства; на фиг, 3 - вид Б на фиг. 1; на фиг. 4 - вид устройства при наклонном положении изделия.
Устройство содержит весы 1, на которые установлена неподвижная опора 2, весы 3, на которые установлена опора 4, содержащая подвижную часть 5, имеющую возможность перемещения вдоль оси, соединяющей центры сфер 6 и 7 за счет применения шарикоподшипниковой связи 8 между подвижной и неподвижной частями. На весах 9 установлена опора 10, содержащая подвижную часть 11, имеющую возмож- ность перемещения в горизонтальной плоскости вдвух взаимно-перпендикулярых направлениях за счет применения шарикоподшипниковой связи 12 между подвижной и неподвижной частями. Изделие 13 непосредственно устанавливается на оснастку, выполненную в виде калиброванного переходника 14. В переходнике 14 выполнены три базовые отверстия 15, в которых размещены штоки 16. Головки 17 штоков неподвижно соединены посредством крепежных элементов 18 со сферами 19,6 и 7. Опорная поверхность 20 подвижной части 11 опоры 10, взаимодействующая со сферой 19, выполнена в одной горизонтальной плоскости с опорной поверхностью 21 этой же подвижной части, взаимодействующей с неподвижной частью опоры 10 посредством шарикоподшипниковой связи 12. Опорная поверхность 22 подвижной части 5 опоры 4, взаимодействующая со сферой б, выполнена в одной горизонтальной плоскости с опорной поверхностью 23 этой же подвижной части, взаимодействующей с неподвижной частью опоры 4 посредством шарикоподшипниковой связи 8.
Устройство снабжено механизмом вертикального перемещения опоры 3, выполненным в виде домкрата 24.
Устройство работает следующим образом,
Опорные поверхности 20 и 21 подвижной части 11 опор с помощью домкрата 24 выводят в одну горизонтальную плоскость с опорными поверхностями 22 и 23 подвижной части 5 опоры 4 и опорной поверхно- стью 25 неподвижной опоры 2. Измеряют реакции Ri°, R2° ,Нз° в опорах с помощью весов. Затем наклоняют с помощью домкрата 24 переходник нэ некоторый заданный угол а, веяичину которого с целью получе- ния максимальной точности измерений выбирают возможно большей из условий конструктивных характеристик изделия и устройства. Измеряют реакцию R208 в опоре 10. После этого возвращают третью опору в исходное состояние, устанавливают и закрепляют на переходнике изделие и производят измерение реакций опор RIM, , Rs. Затем наклоняют переходник с изделием на заданный угол и производят измерение ре- акции в опоре 10 Язин. Обозначим систему координат переходника следующим образом. Ось X направим вдоль оси, соединяющей центры сфер 6 и 7, Оси Y направим вдоль перпендикуляра, опущенного из цен- тра сферы 19 на ось X, ось Z направим из точки 0 пересечения осей Y и перпендикулярно плоскости XOY. Обозначим 1 расстояние между точкой 0 и центрами сфер 6 и 7. Расстояние от точки 0 до центра сферы 19 обозначим т. Точкой С обозначим искомый центр Масс изделия, М - масса изделия, g - ускорение свободного падения.
Координаты центра масс изделия определяются по формулам
X,
(Ri-R2)t
Mg
YcR3m
Zc
Mg
(fa™ - Рзн)
M
ctga.
wRi R2 R2M - R2° R2 RsM - R3° RSH - RsMH - R3° Mg Ri + R2+ R3.
,OH
0 5 0 5 0
5
0
Таким образом, благодаря расположению опорных поверхностей сфер и подвижных частей опор в одной горизонтальной плоскости, исключающему возникновение опрокидывающего момента, и наличию механизма вертикального перемещения третьей опоры, обеспечивающего поворот изделия вокруг горизонтальной оси. проходящей через центры сфер первых двух опор, осуществляется определение вертикальной координаты центра масс изделия, что позволяет расширить функциональные возможности устройства, Вместе с повышением точности определения координат, благодаря использованию калиброванной оснастки, это создает положительный эффект при использовании данного технического решения
Формула изобретения Устройство для определения координат центра масс изделия, содержащее основание, размещенные на нем три силоизмери- тельных узла с опорами, три грузоприемных шарнира, предназначенных для взаимодействия с опорами, отличающееся тем, что, с целью повышения точности и расширения функциональных возможностей, одна из опор установлена с возможностью перемещения вдоль оси, перпендикулярной к основанию, и переходником для размещения изделия, связанным с грузоприемными шарнирами, а опоры размещены на силоиз- мерительных узлах с возможностью перемещения в плоскости, параллельной основанию, и их опорные поверхности размещены в одной плоскости с опорными по- , верхностями грузоприемных шарниров.
Фиг. 8
5 о
л
о
Pvl о
Оэ
с QJ
СП
Гч
-J
со
ип
- а
&
$
о
/
гг1
ФигЛ
| ПЕРЕНОСНОЕ ГРУЗОПРИЕМНОЕ УСТРОЙСТВО ЭЛЕКТРОННО- ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 0 |
|
SU248278A1 |
