Предлагаемое изобретение относится к области транспортного машиностроения и может быть использовано для определения статической устойчивости транспортного средства в продольных и поперечных направлениях, как порожнего, так и загруженного, с возможностью учета неравномерности распределения груза.
Результатами изобретения являются значения координат расположения центра масс транспортного средства и углов статической устойчивости транспортного средства в продольных и поперечных направлениях, что позволит оценить возможность безопасной эксплуатации транспортных средств в различных условиях движения, а также использовать полученные результаты при сертификации транспортных средств.
Технический уровень
В результате патентного поиска найдены следующие патенты:
- Способ расчета массово-геометрических и нагрузочных параметров транспортного средства специального назначения (RU 2487335 С1 МПК, G01M 17/00, опубл. 10.07.2013, Бюл. №19), заключающийся в том, что координаты центра масс системы (транспортного средства) определяются через координаты центров масс отдельных элементов системы, входящих в ее состав, как отношение суммы произведений масс элементов системы на их координаты к полной массе системы, отличающийся тем, что на первоначальном этапе принимается система координат транспортного средства, на втором этапе определяются масса и координаты центра масс оборудования и аппаратных средств с экипажем, на третьем этапе определяются координаты центра масс транспортного средства, оборудованного кузовом-фургоном, на четвертом этапе определяются масса и координаты центра масс полностью снаряженного транспортного средства, на пятом этапе определяется распределение нагрузки на переднюю, заднюю оси и борта транспортного средства, для чего силы, распределенные по длине транспортного средства, заменяются на сосредоточенные, приложенные соответственно к серединам колес и бортам, на шестом этапе определяется продольная и поперечная устойчивость транспортного средства без учета деформации рессор и шин.
Данный способ является трудоемким и требует определения масс и центров масс отдельных элементов системы, входящих в ее состав, что можно реализовать на этапе сборки транспортного средства при его изготовлении фактически, не приемлем для изготовленных транспортных средств, так как потребуется их разборка.
- Устройство для определения массы и положения центра масс изделия (RU 2458328 С1 МПК, G01M 1/12 (2006.01), опубл. 10.08.2012, Бюл. №22), заключающийся в том, что для определения массы и положения центра масс изделия, содержащее опоры, одна из которых неподвижна, а вторая имеет подвижную часть, имеющую возможность вертикального перемещения посредством привода, каретку, установленную на подвижной части опоры с возможностью перемещения в горизонтальной плоскости, а также переходник для установки изделия, отличающееся тем, что опоры закреплены на основании, причем устройство оснащено силоизмерительным элементом выполненным в виде тензодатчика, размещенным на каретке, посредством штанг шарнирно соединенной с неподвижной опорой, переходник шарнирно соединен с неподвижной опорой и силоизмерительным элементом, причем в проекции на вертикальную плоскость шарниры соединения переходника и соединения штанг расположены по углам параллелограмма.
Недостатками данного изобретения является необходимость перемещения изделия вдоль переходника и последующим его поворотом на угол 90° вокруг вертикальной оси в процессе определения координат центра масс, что вызывает значительные осложнения при испытании изделий большой массы и практически неприемлемы для его реализации при испытании транспортных средств с массой от нескольких тонн, до нескольких десятков тонн.
- Наиболее близким к заявленному является способ определения массы и положения центра масс изделия (RU 2579827 С1 МПК, G01M 1/12 (2006.01), опубл. 10.04.2016, Бюл. №10), заключающийся в том, что изделие устанавливают на переходник, шарнирно установленный на трех опорах, и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор, причем установку изделия на переходник производят с заведомым смещением от оси наклона, уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры при различных положениях изделия относительно оси наклона, при достижении состояния неустойчивого равновесия измеряют угол наклона переходника, отличающийся тем, что дополнительно измеряют угол наклона переходника с изделием в состоянии неустойчивого равновесия с прикрепленным к переходнику грузом с известными массой и положением центра масс и по результатам измерений определяют массу и положение центра масс изделия.
Недостатком способа является сложность конструкции. Это связано с тем, что требуется балансировка переходника относительно оси наклона, который является массивной частью устройства и требует точной соосности креплений к двум неподвижным шарнирным опорам.
Также недостатком является то, что необходимо снимать и устанавливать съемный груз, это вызывает усложнение при испытании транспортных средств большой массы.
Возникает сложность из-за требования устанавливать изделие в различных положениях относительно оси наклона, платформа не обеспечивает удержание изделия при измерении угла наклона, так как изделие находится в неустойчивом состоянии равновесия, а также когда положение центра масс значительно смещено за центр продольной оси.
Задачей предлагаемого изобретения является создание способа определения статической устойчивости транспортных средств при отсутствии необходимости изменять положение транспортного средства относительно испытательной площадки, создания минимальных энергозатрат при выполнении наклона транспортного средства в процессе испытания, а также проводить испытания при минимальных значения угла наклона транспортного средства, что позволит определить координаты его центра масс даже в нагруженном состоянии без возникновения возможности опрокидывания (падения).
Поставленная задача решается следующим образом.
Транспортное средство устанавливают на горизонтальную площадку, имеющую возможность наклона, на которой под каждое колесо устанавливают датчики, по ним измеряют силы нормальной реакции опорной поверхности и по полученным данным определяют расстояния на опорной поверхности от точки проекции центра масс по нормалям до линий проекций передней и задней осей на эту же плоскость, а также расстояний до линий, проходящих через центры пятен контакта, образованных на опорной поверхности левыми и правыми колесами соответственно. Затем производят наклон площадки, измеряют угол наклона и значения сил нормальных реакций опорной поверхности под каждым колесом, по полученным данным определяют высоту расположения центра масс по нормали к опорной поверхности, по результатам полученных расстояний определяют углы статической устойчивости транспортного средства в продольных и поперечных направлениях.
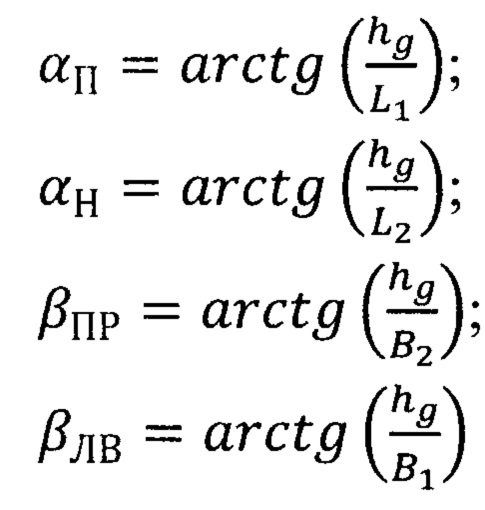
Статическая устойчивость транспортного средства оценивается значениями углов, при которых, возникает равновесное состояния относительно оси, проходящей через колеса, расположенные в нижней части наклонной поверхности, а реакция поверхности под колесами, расположенными выше по уклону, становится равной нулю. При этом можно выделить четыре угла, определяющих статическую устойчивость:
αП - предельный угол устойчивости при опрокидывании вперед относительно передних колес;
αН - предельный угол устойчивости при опрокидывании назад относительно задних колес;
βПР - предельный угол устойчивости при опрокидывании вправо относительно правых колес;
βЛВ - предельный угол устойчивости при опрокидывании влево относительно левых колес.
Значения данных углов, можно определить по координатам расположения центра масс транспортного средства и его геометрических параметров - базы и колеи.
Значения базы и колеи транспортного средства являются известными параметрами, либо их величина может быть определена путем непосредственного измерения. Таким образом, для определения предельных углов устойчивости по опрокидыванию транспортного средства достаточно иметь значения координат его центра масс.
Сущность заявленного способа поясняется фигурами 1-4:
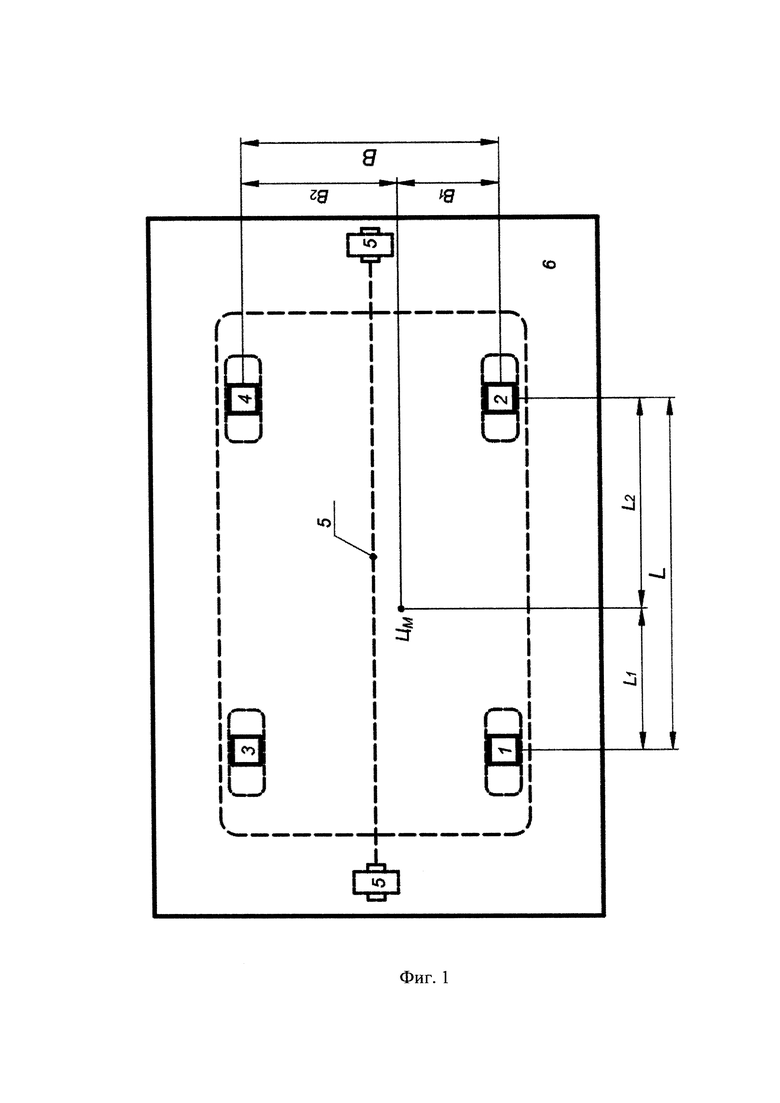
фиг. 1 - площадка для определения статической устойчивости (вид сверху);
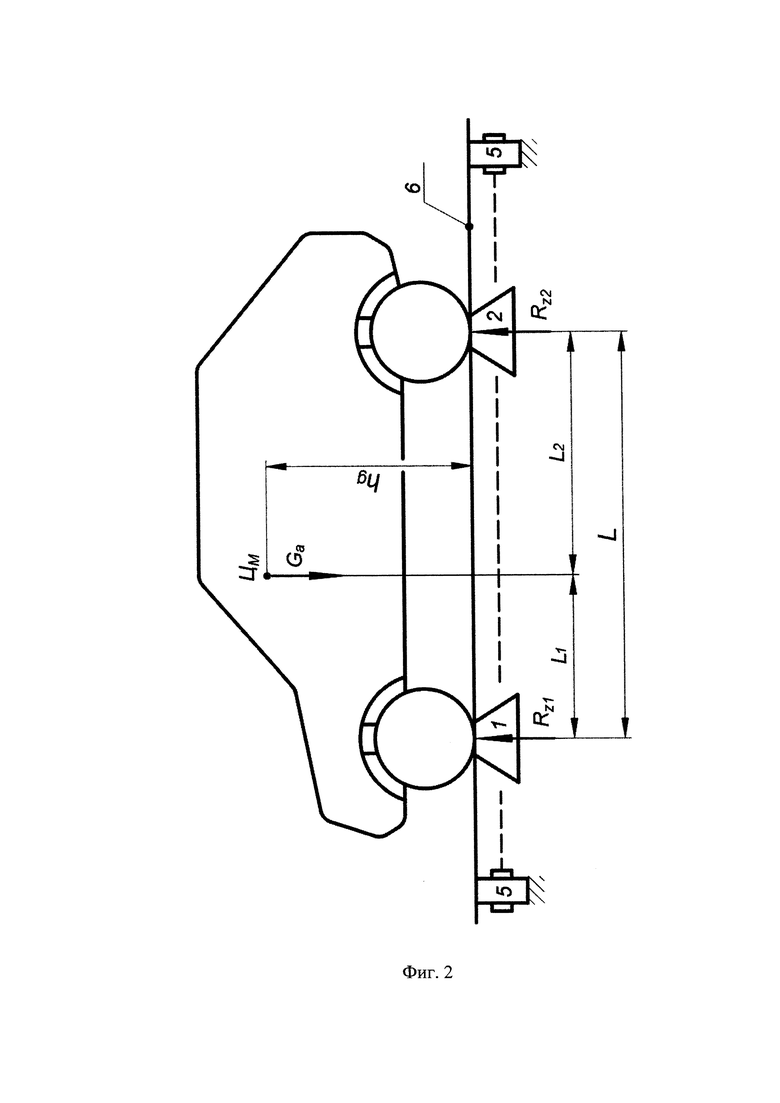
фиг. 2 - площадка для определения статической устойчивости с транспортным средством (вид слева);
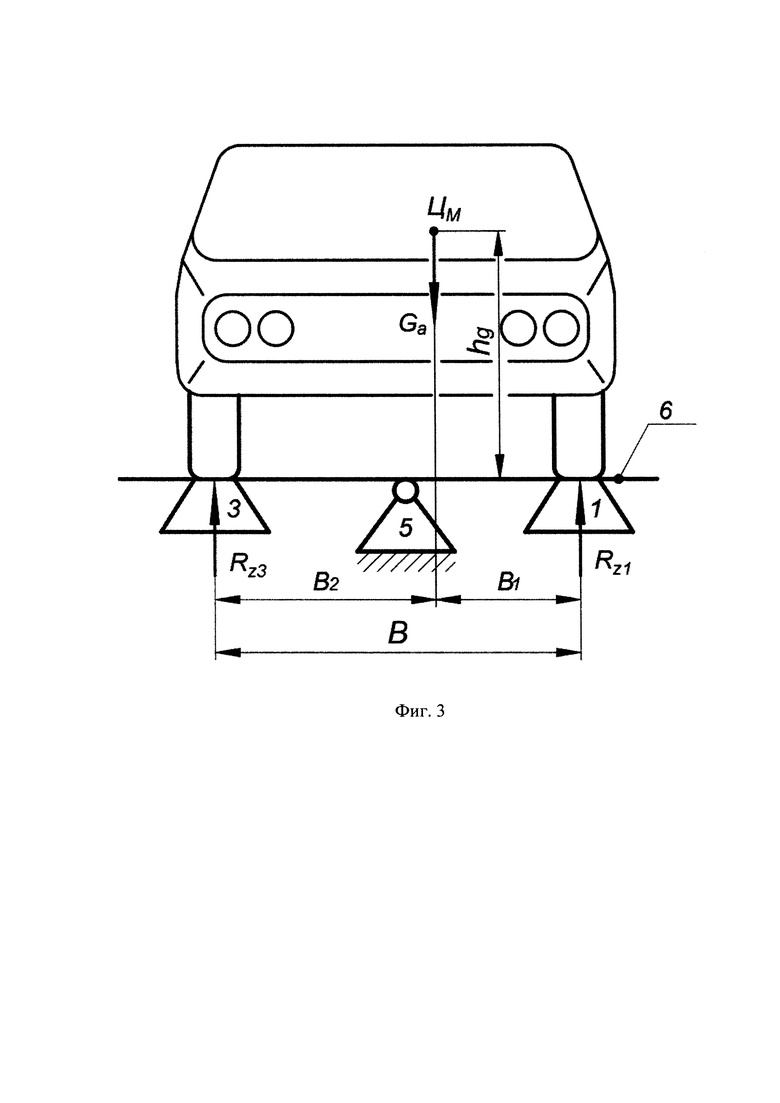
фиг. 3 - площадка для определения статической устойчивости с транспортным средством в горизонтальном положении (вид спереди);
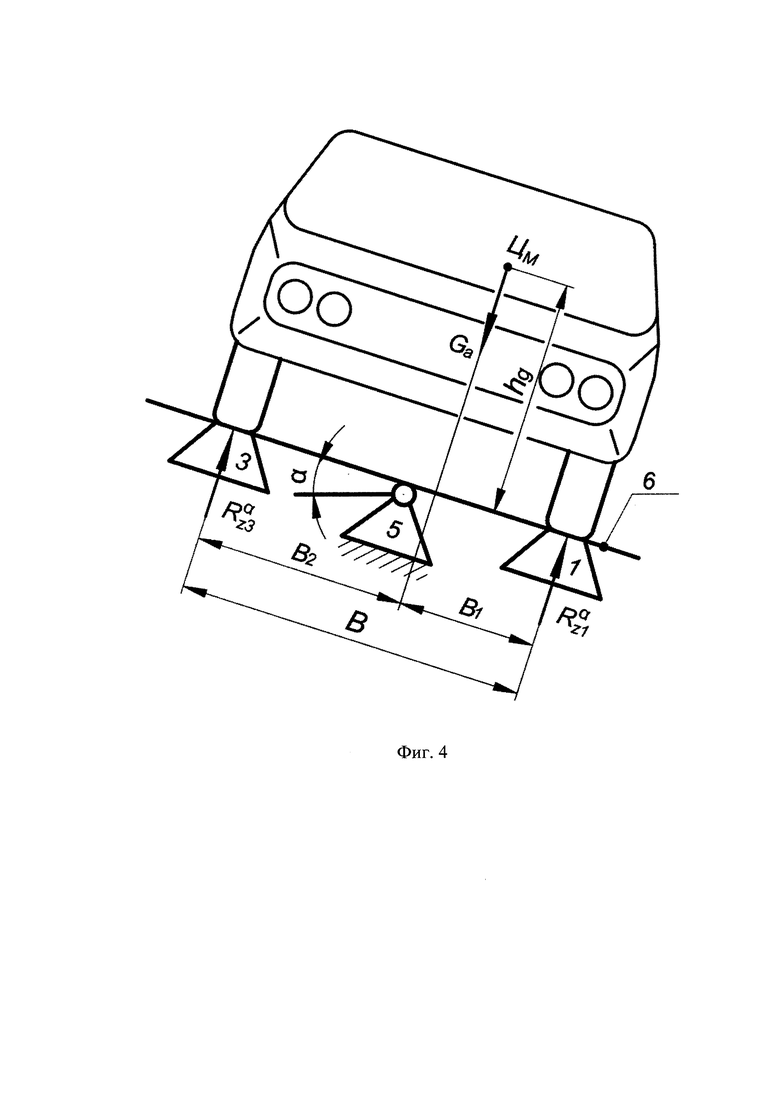
фиг. 4 - площадка для определения статической устойчивости с транспортным средством при наклоне на угол α (вид спереди).
На фиг. 1 - представлена площадка для определения статической устойчивости (вид сверху), с расположенными на ней датчиками веса 1, 2, 3, 4, имеющими возможность перемещения, позволяющую расположить их под каждым колесом транспортного средства. Измеряемые датчиками веса силы реакции площадки под каждым колесом имеют обозначения Rz1, Rz2, Rz3 и Rz4 соответственно. Площадка имеет ось наклона 5 с шарнирами, расположенную вдоль продольной оси симметрии транспортного средства, что позволяет минимизировать энергозатраты в процессе наклона испытания. На фиг. 1 также представлены геометрические параметры: L - база транспортного средства; В - колея транспортного средства; L1 - расстояния на опорной поверхности от точки проекции центра масс по нормали до линии проекции передней оси на эту же плоскость; L2 - расстояния на опорной поверхности от точки проекции центра масс по нормали до линии проекций задней оси на эту же плоскость; В1 - расстояния на опорной поверхности от точки проекции центра масс по нормали до линии, проходящих через центры пятен контакта, образованных на опорной поверхности левыми колесами; В2 - расстояния на опорной поверхности от точки проекции центра масс по нормали до линии, проходящих через центры пятен контакта, образованных на опорной поверхности правыми колесами; ЦМ - центр масс автомобиля.
На фиг. 2 и фиг. 3 представлена площадка 6 для определения статической устойчивости с транспортным средством (вид слева), где Ga - вес транспортного средства; hg - высота расположения центра масс по нормали к опорной поверхности.
На фиг. 3 представлена площадка 6 для определения статической устойчивости с транспортным средством при наклоне на угол а (вид спереди), где  - сила нормальной реакции опорной поверхности под левым передним колесом транспортного средства при его наклоне угол α;
- сила нормальной реакции опорной поверхности под левым передним колесом транспортного средства при его наклоне угол α;  - сила нормальной реакции опорной поверхности под правым передним колесом транспортного средства при его наклоне на угол α; силы нормальных реакции опорной поверхности под левым задним колесом
- сила нормальной реакции опорной поверхности под правым передним колесом транспортного средства при его наклоне на угол α; силы нормальных реакции опорной поверхности под левым задним колесом  и правым задним колесом
и правым задним колесом  транспортного средства при его наклоне на угол α на фиг. 4 не указаны.
транспортного средства при его наклоне на угол α на фиг. 4 не указаны.
Для реализации способа, транспортное средство устанавливают на горизонтально расположенную площадку с расположенными под его колесами датчиками (фиг. 2 и 3) и измеряют силы нормальной реакции опорной поверхности Rz1, Rz2, Rz3, Rz4 под каждым его колесом и определяют расстояния по формулам:

где Ga=Rz1+Rz2+Rz3+Rz4
Затем выполняют наклон площадки с транспортным средством на угол α (фиг. 4) и вновь измеряют силы нормальной реакции опорной поверхности под каждым колесом  и определяют высоту расположения центра масс по нормали к опорной поверхности по формуле
и определяют высоту расположения центра масс по нормали к опорной поверхности по формуле

или
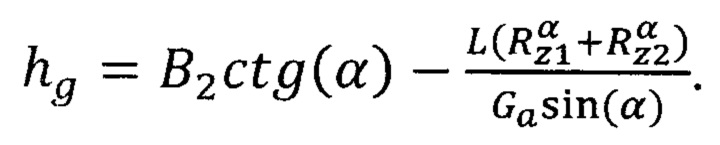
Угла, определяющие статическую устойчивость транспортного средства определяют по формулам
Преимуществами предложенного способа является возможность испытания транспортного средства при минимальных углах наклона, практически не вызывающих деформацию упругих элементов и шин, что позволяет определять расположение центра масс для нагруженных транспортных средств, с учетом неравномерности расположения груза, а также минимизация энергозатрат для наклона транспортного средства. Использование минимальных углов наклона также не требует применения устройств, исключающих возможность соскальзывания транспортного средства при испытаниях, а также его опрокидывания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ И ОГРАНИЧЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПО ПАРАМЕТРАМ КУРСОВОЙ И ПОПЕРЕЧНОЙ УСТОЙЧИВОСТИ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ | 2022 |
|
RU2825166C2 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| СПОСОБ ИСПЫТАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2014 |
|
RU2573028C1 |
| СИСТЕМА КОНТРОЛЯ ГРУЗОВОЙ УСТОЙЧИВОСТИ МОБИЛЬНЫХ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2267458C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| Способ измерения вертикальной координаты центра тяжести объекта | 2019 |
|
RU2711210C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТНЫМИ КОЛЕСАМИ НАЗЕМНОГО БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2320512C1 |
| Лабораторная установка для изучения продольной устойчивости и управляемости транспортного средства | 1988 |
|
SU1654857A1 |
| Способ косвенного измерения вертикальной координаты центра тяжести объекта | 2020 |
|
RU2736325C1 |
| Способ определения коэффициента поперечного сцепления эластичной шины автомобильного колеса | 2017 |
|
RU2661555C1 |
Изобретение относится к области транспортного машиностроения. Способ определения статической устойчивости транспортных средств, заключающийся в том, что транспортное средство устанавливают на горизонтальную площадку, имеющую возможность наклона. Устанавливают под каждое колесо датчики, по которым измеряют силы нормальной реакции опорной поверхности и по полученным данным определяют расстояния на опорной поверхности от точки проекции центра масс по нормалям до линий проекций передней и задней осей на эту же плоскость, а также расстояний до линий, проходящих через центры пятен контакта, образованных на опорной поверхности левыми и правыми колесами соответственно. Производят наклон площадки. Измеряют угол наклона и значения сил нормальных реакций опорной поверхности под каждым колесом. По полученным данным определяют высоту расположения центра масс по нормали к опорной поверхности. По результатам полученных расстояний определяют углы статической устойчивости транспортного средства в продольных и поперечных направлениях. Достигается возможность испытания транспортного средства при минимальных углах наклона. 4 ил.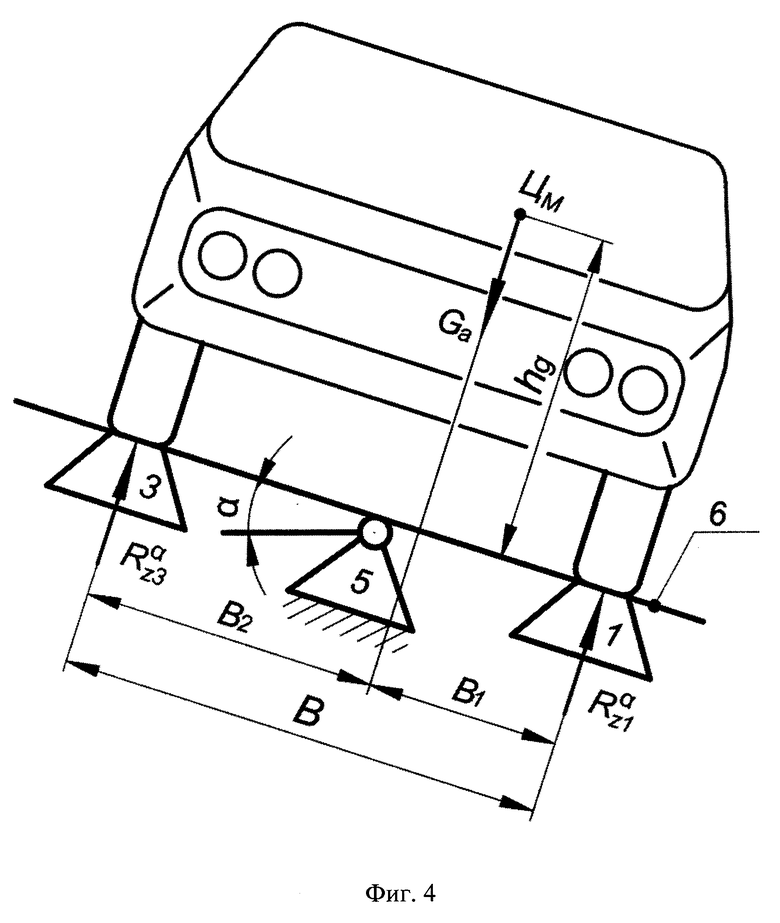
Способ определения статической устойчивости транспортных средств, заключающийся в том, что транспортное средство устанавливают на горизонтальную площадку, имеющую возможность наклона, отличающийся тем, что дополнительно устанавливают под каждое колесо датчики, по ним измеряют силы нормальной реакции опорной поверхности и по полученным данным определяют расстояния на опорной поверхности от точки проекции центра масс по нормалям до линий проекций передней и задней осей на эту же плоскость, а также расстояний до линий, проходящих через центры пятен контакта, образованных на опорной поверхности левыми и правыми колесами соответственно, после чего производят наклон площадки, измеряют угол наклона и значения сил нормальных реакций опорной поверхности под каждым колесом, по полученным данным определяют высоту расположения центра масс по нормали к опорной поверхности, по результатам полученных расстояний определяют углы статической устойчивости транспортного средства в продольных и поперечных направлениях по формуле
где hg - высота расположения центра масс по нормали к опорной поверхности;
А - расстояние на опорной поверхности от точки проекции на нее центра масс по нормали до:
- линии проекции передней оси на опорную поверхность, при опрокидывании вперед;
- линии проекции задней оси на опорную поверхность, при опрокидывании назад;
- лини проходящей через центры пятен контакта на опорной поверхности левых колес, при опрокидывании влево;
- лини проходящей через центры пятен контакта на опорной поверхности правых колес, при опрокидывании вправо.
| SU 914959 A1, 26.03.1982 | |||
| Стенд для определения параметров устойчивости колесных машин | 1988 |
|
SU1684610A1 |
| US 20120131994 A1, 31.05.2012 | |||
| US 10782202 B2, 22.09.2020. | |||

