Группа изобретений относится к машиностроению и может быть использована для определения массы и/или положения центра масс преимущественно крупногабаритных изделий.
Известен способ определения массы и положения центра масс изделия, заключающийся в том, что изделие устанавливают на переходник, шарнирно установленный на трех опорах (одна боковая, вторая центральная и третья боковая опоры), и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор.
(см. А.С. СССР №789692, кл. G01M 1/12, 1980) - наиболее близкий аналог для способа.
В результате анализа известного способа необходимо отметить, что его недостатком является большая трудоемкость и сравнительно низкая производительность определения массы и положения центра масс крупногабаритных изделий, связанная с подбором для уравновешивания значительной массы гирь и необходимостью выполнения операции перемещения крупногабаритных изделий на переходнике.
Известно устройство для определения массы и положения центра масс изделия, содержащее переходник для установки изделия, шарнирно соединенный с тремя опорами, две из которых снабжены силоизмерительными элементами, а третья имеет подвижную часть, выполненную с возможностью вертикального перемещения посредством привода.
(см. А.С. СССР №1781576, кл. G01M 1/12, 1992) - наиболее близкий аналог для устройства.
В результате анализа выполнения известного устройства необходимо отметить, что его недостатком является сравнительная сложность и ненадежность конструкции, так как оно представляет собой набор незакрепленных надежно друг с другом и с основанием различных элементов, включающих три силоизмерительных элемента, две подвижные каретки и переходник.
Техническим результатом заявленной группы изобретений является упрощение осуществления способа и повышение надежности конструкции устройства, а также уменьшение трудоемкости и повышение производительности определения массы и положения центра масс изделия.
Указанный технический результат обеспечивается за счет того, что в способе определения массы и положения центра масс изделия, заключающемся в том, что изделие устанавливают на переходник, шарнирно установленный на трех опорах, и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор, новым является то, что изделие устанавливают на переходник с заведомым смещением от оси наклона, уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры при различных положениях изделия относительно оси наклона, при достижении состояния неустойчивого равновесия измеряют угол наклона переходника и производят измерение массы изделия с помощью силоизмерительных датчиков в составе первых двух опор, изделие устанавливают на переходник в трех положениях, в которых переход из одного в другое производят, например, поворотом изделия относительно оси, перпендикулярной плоскости, в которой находится ось наклона, в качестве начала отсчета угла наклона выбирают, например, горизонтальное положение переходника, а измерение угла наклона производят в положении переходника, при котором происходит его отрыв от третьей опоры.
В устройстве для определения массы и положения центра масс изделия, содержащем переходник для установки изделия, шарнирно соединенный с тремя опорами, две из которых снабжены силоизмерительными элементами, а третья имеет подвижную часть, выполненную с возможностью вертикального перемещения посредством привода, новым является то, что устройство снабжено датчиком наклона переходника относительно оси, проходящей через шарниры первых двух опор, а на переходнике имеется поворотная платформа, ось поворота которой является скрещивающейся с осью наклона и отстоящей от нее на заданном расстоянии, ось поворота платформы и ось наклона платформы скрещиваются, например, под прямым углом, датчик наклона переходника может быть установлен соосно с осью наклона, силоизмерительные элементы могут быть выполнены в виде тензодатчиков.
Совокупность отличительных признаков устройства и способа упрощает и повышает надежность конструкции устройства, уменьшает трудоемкость и повышает производительность определения массы и положения центра масс изделия.
Сущность заявленной группы изобретений иллюстрируется графическими материалами, на которых:
- на фиг.1 - устройство с изделием в исходном положении;
- на фиг.2 - вид на устройство со стороны опор, оснащенных силоизмерительными элементами;
- на фиг.3 - устройство с изделием в наклонном положении;
- на фиг.4 - устройство, вид сверху;
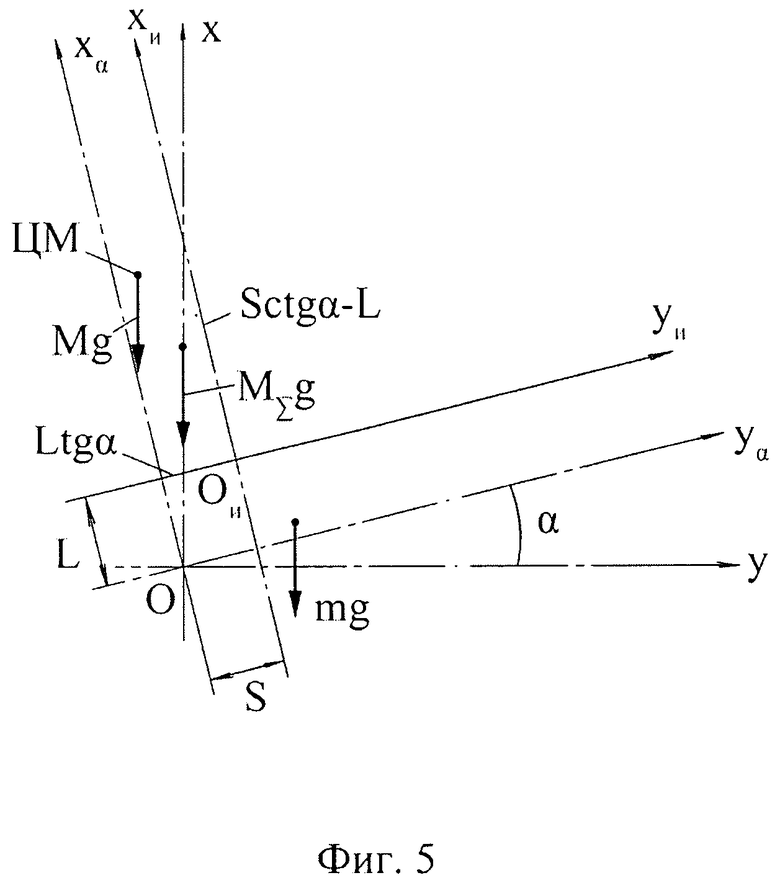
- на фиг.5 - взаимное расположение систем координат изделия и устройства при уравновешенном состоянии изделия с переходником.
Устройство содержит переходник 1 для установки изделия 2, соединенный шарнирами 3, 4 и 5 с тремя опорами 6, 7 и 8, две из которых, 6 и 7, снабжены силоизмерительными элементами 9 и 10, а третья опора 8 имеет подвижную часть 11, выполненную с возможностью вертикального перемещения посредством привода в составе опоры 8. Устройство снабжено датчиком 12 наклона переходника 1 относительно оси 13 наклона, проходящей через шарниры 3 и 4 первых двух опор. На переходнике 1 имеется поворотная платформа 15, ось 16 поворота которой является скрещивающейся с осью 13 наклона и отстоящей от нее на заданном расстоянии S. Расстояние S выбирается, с одной стороны, достаточно большим для уменьшения погрешностей измерения углов наклона, с другой стороны учитываются конструктивные особенности, вносящие ограничения на наклон крупногабаритных изделий. Расстояние L от оси 13 до верхней плоскости платформы 15 выбирается возможно меньшим, учитывая обеспечение достаточной прочности платформы. Ось 16 поворота платформы и ось 13 наклона платформы скрещиваются под прямым углом. Датчик 12 наклона переходника установлен на опоре 7 соосно с осью 13 наклона, подвижная часть 14 датчика 12 крепится к валу переходника 1, опирающемуся посредством шарнира 4 на опору 7. На подвижной части 11 опоры 8 закреплена скоба 17, в которой размещен шарнир 5. Силоизмерительные элементы 9 и 10 выполнены в виде тензодатчиков. Опоры 6, 7 и 8 закреплены на опорной плите основания 18.
Способ определения массы и положения центра масс изделия посредством описанного выше устройства осуществляют следующим образом.
Изделие 2 устанавливают на переходник 1, уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси 13 наклона, проходящей через шарниры 3 и 4 первых двух опор 6 и 7. Изделие устанавливают на переходник с заведомым смещением S от оси 13 наклона. Уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры 8 при различных положениях изделия относительно оси 13 наклона. При достижении состояния неустойчивого равновесия с помощью датчика 12 измеряют угол наклона переходника и производят измерение массы изделия с помощью силоизмерительных датчиков в составе первых двух опор. Изделие устанавливают на переходник в трех положениях, в которых переход из одного положения в другое производят поворотом изделия относительно оси 16, перпендикулярной плоскости, в которой находится ось 13 наклона. В качестве начала отсчета угла наклона выбирают горизонтальное положение переходника, показанное на фиг. 1, а измерение угла наклона производят в положении переходника, показанном на фиг. 3, при котором происходит его отрыв от третьей опоры.
Расчет массы М изделия производится по формуле:

где  - суммарная масса переходника с изделием, измерение которой производится силоизмерительными датчиками 9 и 10, m - известная масса переходника.
- суммарная масса переходника с изделием, измерение которой производится силоизмерительными датчиками 9 и 10, m - известная масса переходника.
Для определения положения центра масс изделия используются три уравнения вертикальной плоскости равновесия, проходящей через ось 13 в системе координат изделия при трех различных равновесных состояниях изделия с переходником относительно оси 13 уравновешивания. Положение системы координат переходника Oxyz в начальном положении, переходника Oxαyαzα при наклоне на угол α, и системы координат изделия Oxиyиzи при наклоне показано на фиг.5.
Сначала изделие устанавливают на платформу переходника в первом положении так, как показано на фиг.1, после чего переходник наклоняют, как показано на фиг.3, и измеряют угол α1 наклона в первом равновесном состоянии. При этом система координат переходника Oxyz займет положение Oxα1yα1zα1. Затем переходник возвращают в начальное положение, поворачивают изделие вокруг оси 16, совпадающей с осью Оиxи на платформе переходника на 90° во второе положение так, что ось Оиyи принимает положение, в котором находилась ось Oиуи. После чего переходник наклоняют до достижения состояния равновесия и измеряют угол α2 наклона. Затем переходник возвращают в начальное положение, поворачивают изделие вокруг оси 16, совпадающей с осью Оиxи на платформе переходника на 180° от первоначального положения в третье положение так, что направление оси Оиyи становится противоположным первоначальному своему направлению. После чего переходник наклоняют до достижения состояния равновесия и измеряют угол α3 наклона. Далее решают систему трех уравнений, описывающих положение плоскости равновесия в системе координат изделия:

из решения которой находят координаты суммарного центра масс переходника с изделием xиΣ, yиΣ, zиΣ. Для вычисления координат центра масс изделия решают систему уравнений, связывающую статические моменты массы переходника и изделия в системе координат изделия:

где: MΣ - суммарная масса переходника с изделием, xио, yио, zиo - известные координаты центра масс переходника, xцм, yцм, zцм, - искомые координаты центра масс изделия, определяющие положение центра масс в системе координат изделия.
Заявленная группа изобретений упрощает и повышает надежность конструкции устройства, уменьшает трудоемкость и повышает производительность определения массы и положения центра масс изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2579827C1 |
| Способ определения статической устройчивости транспортных средств | 2022 |
|
RU2788539C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| Устройство для определения координат центра масс изделия | 1989 |
|
SU1781576A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2012 |
|
RU2593644C2 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2476843C1 |



Изобретения относятся к машиностроению, а именно к устройствам и способам определения координат центра масс преимущественно крупногабаритных изделий. Устройство содержит переходник для установки изделия, шарнирно соединенный с тремя опорами, две из которых снабжены силоизмерительными элементами, а третья имеет подвижную часть, выполненную с возможностью вертикального перемещения посредством привода. Также устройство снабжено датчиком наклона переходника относительно оси, проходящей через шарниры первых двух опор, а на переходнике имеется поворотная платформа, ось поворота которой является скрещивающейся с осью наклона и отстоящей от нее на заданном расстоянии. Способ заключается в том, что изделие устанавливают на переходник устройства и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор. Изделие устанавливают на переходник с заведомым смещением от оси наклона, уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры при различных положениях изделия относительно оси наклона. При достижении состояния неустойчивого равновесия измеряют угол наклона переходника и производят измерение массы изделия с помощью силоизмерительных датчиков в составе первых двух опор. Технический результат заключается в упрощении осуществления способа, повышении надежности устройства. 2 н. и 5 з.п. ф-лы, 5 ил.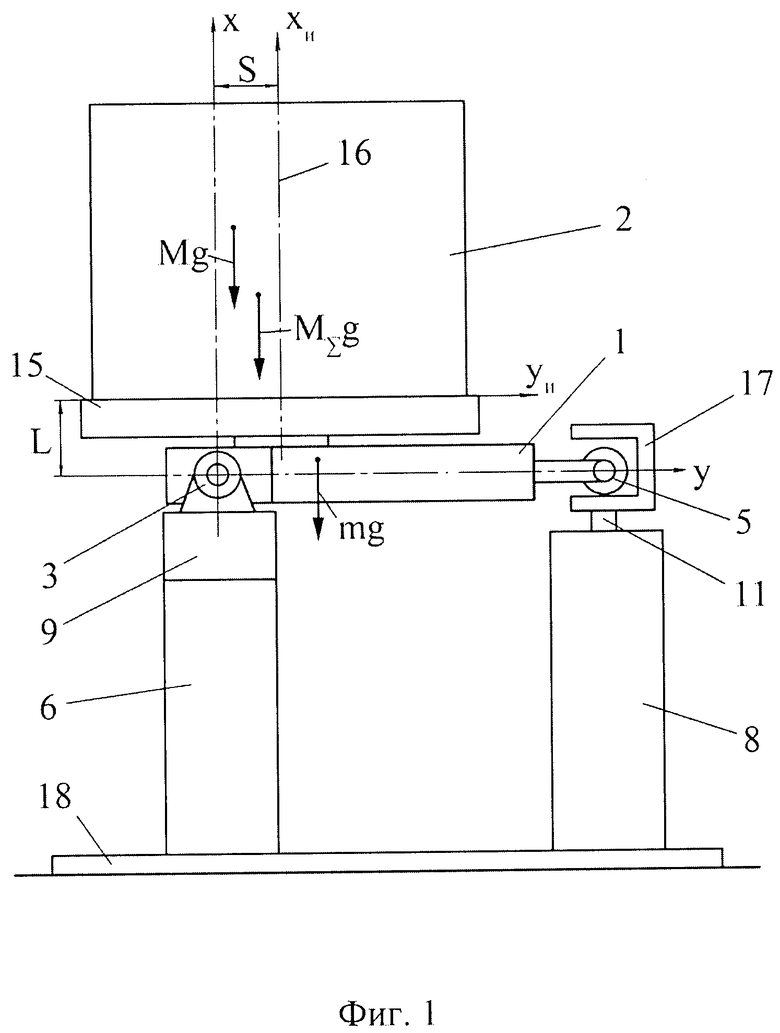
1. Способ определения массы и положения центра масс изделия, заключающийся в том, что изделие устанавливают на переходник, шарнирно установленный на трех опорах, и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор, отличающийся тем, что изделие устанавливают на переходник с заведомым смещением от оси наклона, уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры при различных положениях изделия относительно оси наклона, при достижении состояния неустойчивого равновесия измеряют угол наклона переходника и производят измерение массы изделия с помощью силоизмерительных датчиков в составе первых двух опор.
2. Способ по п.1, отличающийся тем, что изделие устанавливают на переходник в трех положениях, в которых переход из одного в другое производят поворотом изделия относительно оси, перпендикулярной плоскости, в которой находится ось наклона.
3. Способ по п.1, отличающийся тем, что в качестве начала отсчета угла наклона выбирают горизонтальное положение переходника, а измерение угла наклона производят в положении переходника, при котором происходит его отрыв от третьей опоры.
4. Устройство для определения массы и положения центра масс изделия, содержащее переходник для установки изделия, шарнирно соединенный с тремя опорами, две из которых снабжены силоизмерительными элементами, а третья имеет подвижную часть, выполненную с возможностью вертикального перемещения посредством привода, отличающееся тем, что устройство снабжено датчиком наклона переходника относительно оси, проходящей через шарниры первых двух опор, а на переходнике имеется поворотная платформа, ось поворота которой является скрещивающейся с осью наклона и отстоящей от нее на заданном расстоянии.
5. Устройство по п.4, отличающееся тем, что ось поворота платформы и ось наклона платформы скрещиваются под прямым углом.
6. Устройство по п.4, отличающееся тем, что датчик наклона переходника установлен соосно с осью наклона.
7. Устройство по п.4, отличающееся тем, что силоизмерительные элементы выполнены в виде тензодатчиков.
| Устройство для определения координат центра масс изделия | 1989 |
|
SU1781576A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
| Устройство для определения массы и трех координат центра масс изделия | 1983 |
|
SU1128127A1 |
| Стенд для определения массы и координат центра масс изделий | 1981 |
|
SU1096508A1 |
| Стенд для определения моментов инерции и координат центра масс изделий | 1983 |
|
SU1097899A1 |

