Изобретение относится к измерительной технике и может быть использовано для настройки акселерометров как однонаправленной так и многонаправленной чувствительности.
При настройке акселерометров многонаправленной чувствительности (до полной сферы включительно), типовая конструкция которых показана на фиг. 1, на ротационных установках со столом, вращающимся в горизонтальной плоскости, возникают затрудне- ния в части определения величины настройкид.к. к центробежной силе необходимо вводить прправки для каждого положения акселерометра.
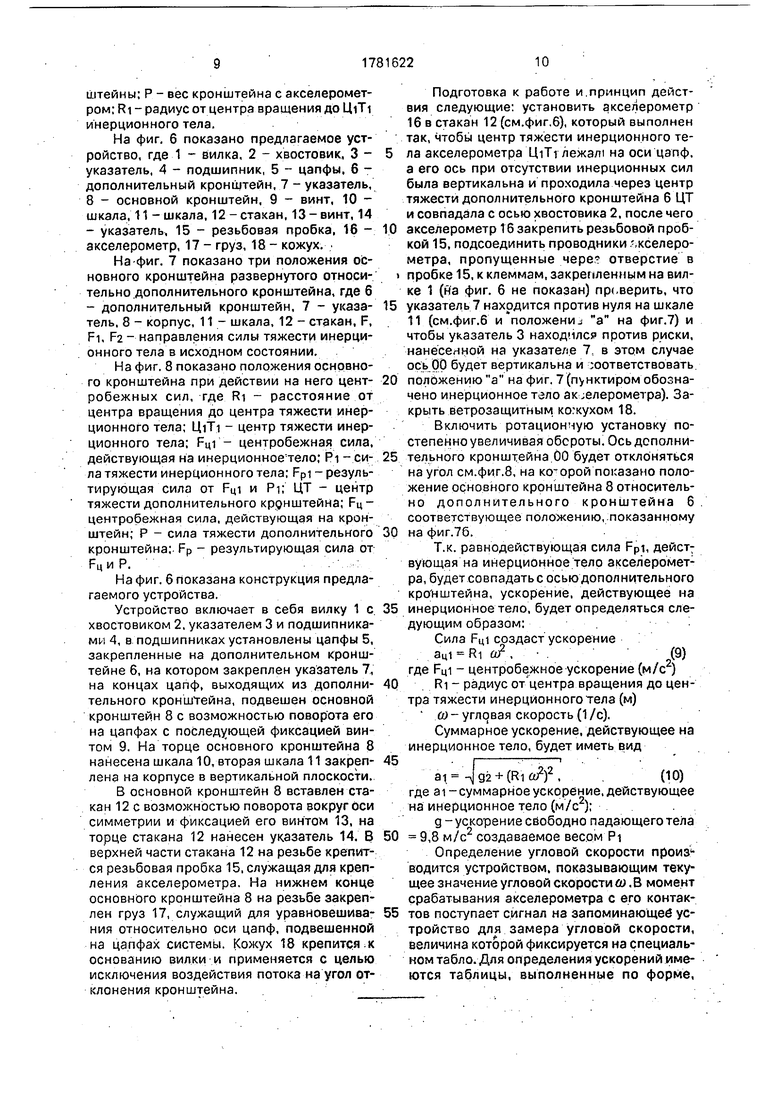
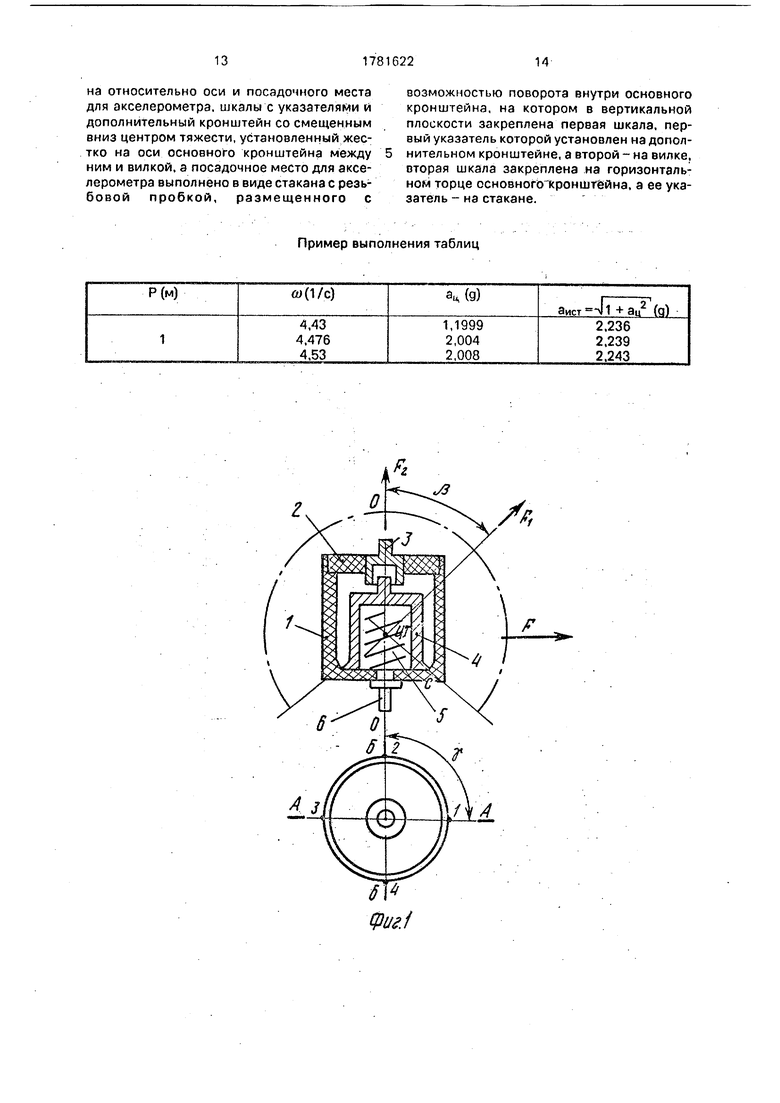
На фиг.1 показано устройство и принцип действия акселерометра.
Акселерометр состоит из корпуса 1, крышки 2, верхнего контакта 3, инерционного тела 4, пружины 5, втулки 6 для крепления пружины, она же является и токовыводом.
Зона чувствительности превышает полусферу (на фиг. 1 показана штрихпункти- ром), центр которой совпадает с центром тяжести инерционного тела.
Принцип действия следующий.
При действии силы в пределах зоны чувствительности по достижении величины настройки, например силы F2, инерционное тело 4 преодолевая силу пружины 5 будет двигаться вдоль оси 00 до упора инерционного тела 4 в контакт 3, произойдет замыкание электрической цепи между контактом 3 и втулкой 6, т.е. произойдет срабатывание датчика, При действии силы F, инерционное
VI
00
а ю го
тело будет поворачиваться вокруг точки С до упора выступа на инерционном теле 4 в контакт 3, в результате чего произойдет срабатывание датчика.
Для подтверждения работоспособно- сти акселерометра, проверку настройки необходимо осуществлять при действии сил в различных направлениях всей зоны чувствительности.
На фиг. 1 для примера приведено 3 на- правления (F, Fi, F2) действия сии в плоскости АА..
Для подтверждения работоспособности акселерометра во всей полусфере та кую не проверку необходимо произвести и для действия сил в других плоскостях, например, в плоскости ББ. Количество направле- ний действия сил определяется в зависимости от конкретных условий применения акселерометра.
Работа такого акселерометра в реальных условиях отличается от работы D условиях настройки на ротационной установке.
Для пояснения рассмотрим работу механизма, показанного на фиг. 1 в реальных условиях и при настройке его на ротационной машине. Возьмем вес инерционного тела механизма равным 10 г и усилие натяжения пружины 20 г.
В реальных условиях при действии инерционной силы, совпадающей с направлением F2. возникшей, например, при встрече падающего обьекта с преградой, акселерометр срабатывает при ускорении 2д,
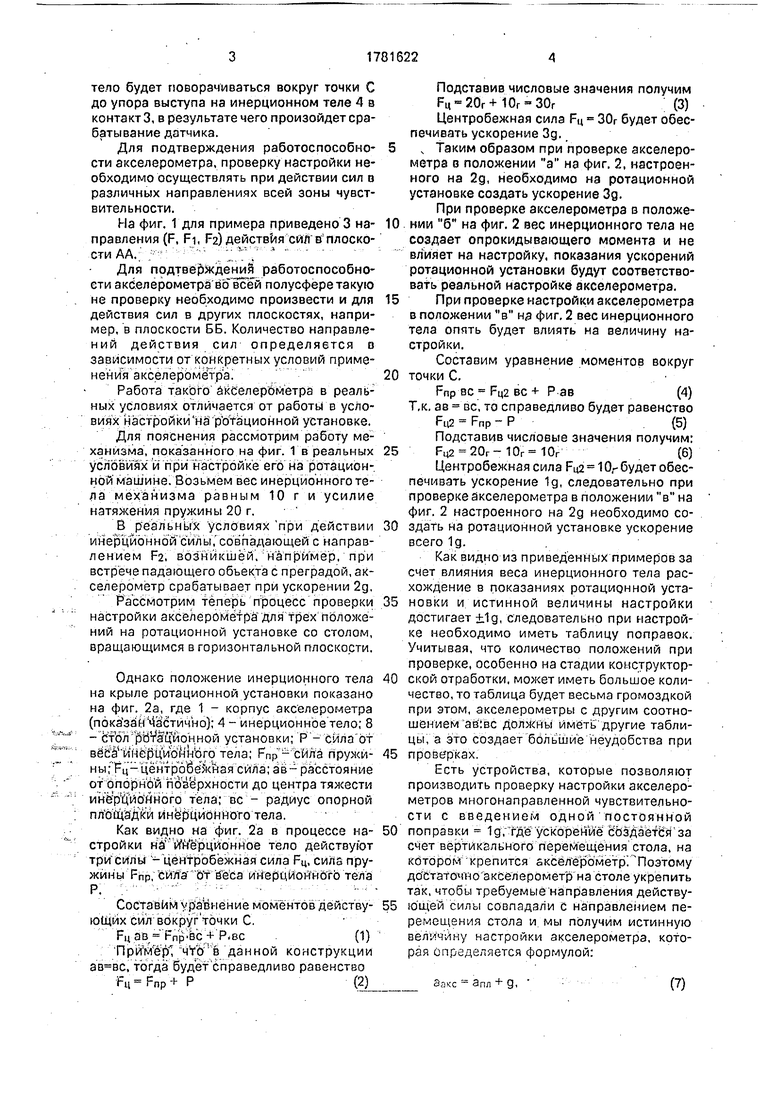
Рассмотрим теперь процесс проверки настройки акселерометра для трех положений на ротационной установке со столом, вращающимся в горизонтальной плоскости.
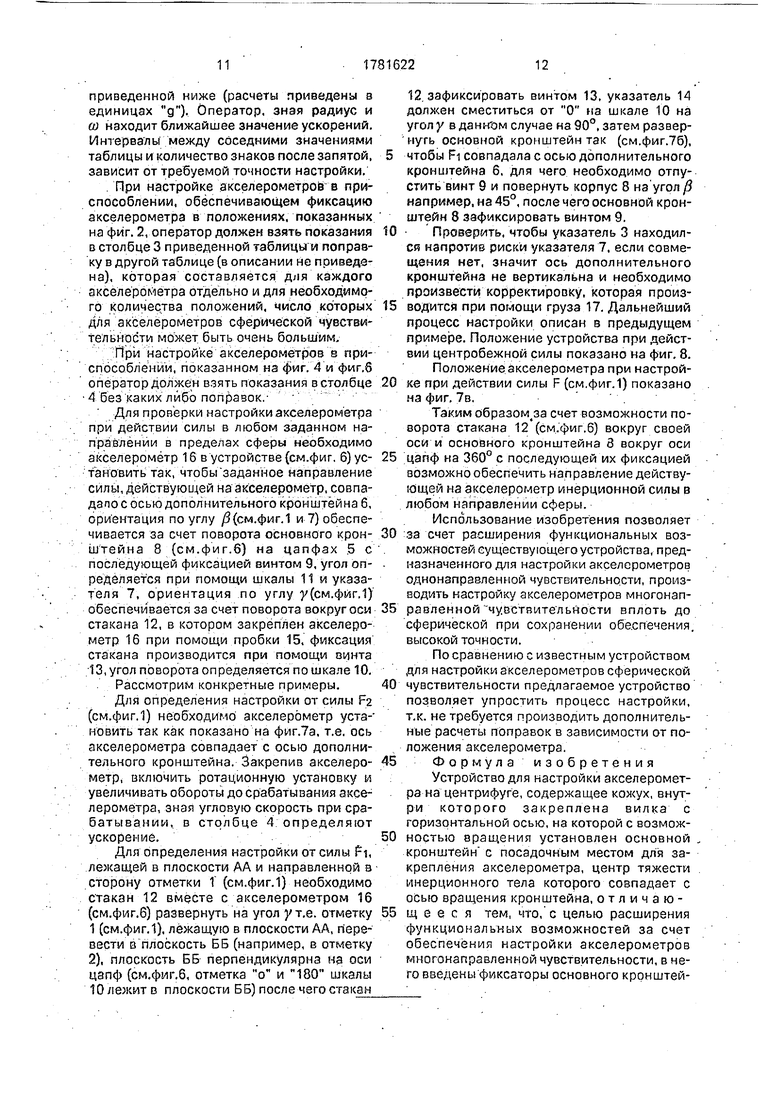
Однако положение инерционного тела на крыле ротационной установки показано на фиг. 2а, где 1 - корпус акселерометра (пока зам частично); 4 - инерционное тело; 8 - Стол pdVaQVioHHOH установки; Р - сила от веба мнерциойного тела; сила пружи- ны; Рц- центробе кная сила; ав- расстояние от опорной поверхности до центра тяжести инерционного тела; вс - радиус опорной площадки инерционного тела.
Как видно на фиг. 2а в процессе на- стройки на инерционное тело действуют три силы - центробежная сила Рц, сил& пружины Fnp, сила от беса инерционного тела Р.
Составим уравнение моментов действу- ющих сил вокруг точки С
Рц ав Fnp-BC + Р.вс(1)
При м ер чҐо в данной конструкции , тогда будет справедливо равенство
f ц Fnp н Р(2)
Подставив числовые значения получим Fu 20r+10r 30r(3)
Центробежная сила Рц 30Г будет обеспечивать ускорение Зд.
ч Таким образом при проверке акселерометра в положении а на фиг, 2, настроенного на 2д, необходимо на ротационной установке создать ускорение Зд.
При проверке акселерометра в положении б на фиг. 2 вес инерционного тела не создает опрокидывающего момента и не влияет на настройку, показания ускорений ротационной установки будут соответствовать реальной настройке акселерометра.
При проверке настройки акселерометра в положении в н& фиг, 2 вес инерционного тела опчть будет влиять на величину настройки.
Составим уравнение моментов вокруг точки С.
Fnp вс Рц2 вс + Р ав(4)
Т.к. ав вс, то справедливо будет равенство Ftl2 Fnp - Р(5)
Подставив числовые значения получим: Рц2 20г-10г-10г(6)
Центробежная сила Рц2 -10,- будет обеспечивать ускорение 1д, следовательно при проверке акселерометра в положении в на фиг. 2 настроенного на 2д необходимо создать на ротационной установке ускорение всего 1д.
Как видно из приведенных примеров за счет влияния веса инерционного тела расхождение в показаниях ротационной установки и истинной величины настройки достигает ±1д, следовательно при настройке необходимо иметь таблицу поправок. Учитывая, что количество положений при проверке, особенно на стадии конструкторской отработки, может иметь большое количество, то таблица будет весьма громоздкой при этом, акселерометры с другим соотношением ав:вс должны иметь другие таблицы, а это создает большие неудобства при проверках
Есть устройства, которые позволяют производить проверку настройки акселерометров многонаправленной чувствительности с введением одной постоянной поправки 1д, где ускорение создается за счет вертикального перемещения стола, на котором крепится акселерометр. Поэтому достаточно акселерометр на столе укрепить так, чтобы требуемые направления действующей силы совладали с направлением перемещения стола и мы получим истинную величину настройки акселерометра, которая определяется формулой:
- Зпл + Q,
(7)
где Эакс - ускорение, действующее на инерционное тело акселерометра (м/с )
Эпл - ускорение движения платформы (м/с2)
g - ускорение свободного падения тела (9,8 м/с2)
Однако, эти устройства имеют существенные недостатки, как-то: сложны, занимают много места, не могут обеспечить больших ускорений, мало время воздействия ускорений, не могут обеспечить различные темпы нарастания ускорений.
Применяется устройство ME 7870- 5220-86 показанное на фиг.З, которое исключает недостатки вышеперечисленных устройств и позволяет производить настройку акселерометров только однонаправленной чувствительности. Это устройство является наиболее близким по технической сущности к предлагаемому устройству и принимается за прототип.
Такое устройство, показанное на фиг. 3, помещенное в защитный кожух и содержащее вилку 1 с двумя гнездами, в которых установлены подшипники качения 2, ось которых параллельна опорной поверхности вилки, в подшипниках установлены цапфы 3, которые закреплены в кронштейне 4. Акселерометр 5 устанавливается в гнездо кронштейна 4, которое выполнено так, чтобы центр тяжести инерционного тела акселерометра UiTi лежал на оси цапф, а его ось при отсутствии инерционных сил была вертикальна и проходила через центр тяжести кронштейна 4 Ц.Т. и совпадала с осью хвостовика 6. На вилке 1 закреплены две клеммы для крепления проводников, идущих от акселерометра, крепление вилки 1 к столу 8 ротационной машины производится при помощи хвостовика и гайки 9, кожух 10 применяется с целью исключения воздействия воздушного потока на угол отклонения кронштейна.
Принцип действия.
После установки акселерометра 5 в кронштейн 4 и закрепления ветрозащитного кожуха 10 в исходном состоянии при отсутствии центробежной силы, ось 00 кронштейна 4 будет находиться в вертикальном положении (см.фиг.З и фиг.4а).
При действии центробежной силы Рц (см.фиг,46) кронштейн 4 отклонится в угол а ось корпуса будет направлена по результирующей Fp, a т.к. ось акселерометра сов- падает с осью кронштейна, то направление движения инерционного тела будет совпадать с осью акселерометра и перемещение его будет происходить без трения о корпус, что обеспечивает повышение точности.
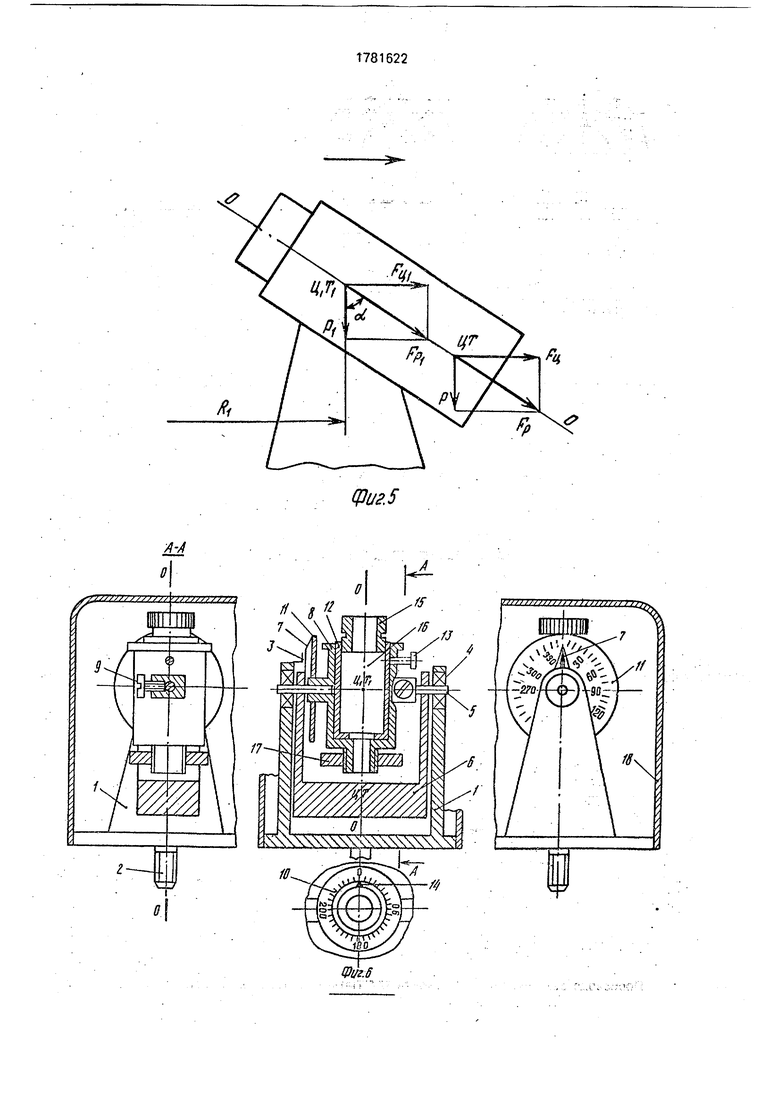
Величина ускорения, действующего на инерционное тело Fpi, показана на фиг. 5 и, выраженная в м/с2, будет иметь вид;.
аист - Jg2 + (Ri о/)2,
0
5
0
5
0
5
0
5
0
5
(8)
где аист - суммарное ускорение, действующее на инерционное тело (м/с2)
g - ускорение свободного падения тела (9,8 м/с2)
RI - радиус от центра вращения до центра тяжести инерционного тела (м)
о- угловая скорость (1 /с)
Недостатком данного устройства является то, что на нем можно осуществлять проверку настройки акселерометров, имеющих только однонаправленную чувствительность.
Целью изобретения является расширение функциональных возможностей, т.е. возможности осуществлять настройку акселерометров как однонаправленной, так и многонаправленной чувствительности при действии инерционной силы на акселерометр в любом направлении в пределах полной сферы.
Указанная цель достигается тем, что в устройство, содержащее кожух, внутри которого закреплена вилка с горизонтальной осью, на которой с возможностью вращения установлен кронштейн с посадочным местом для закрепления акселерометра, центр тяжести инерционного тела которого совпадает с осью вращения кронштейна дополни- тельно введены фиксаторы основного кронштейна относительно оси и посадочного места для акселерометра, шкалы с указателями и дополнительный кронштейн со смещением вниз центром тяжести, установленный жестко на оси основного кронштейна между ним и вилкой, а посадочное место для акселерометра выполнено в виде стакана с резьбовой пробкой размещенного с возможностью поворота внутри основного кронштейна, на котором в вертикальной плоскости закреплена первая шкала, первый указатель которой установлен на дополнительном кронштейне, а второй на вилке, вторая шкала закреплена на горизонтальном торце основного кронштейна, а ее указатель на стакане. Основной кронштейн со стаканом выполнены так, что центр тяжести основного кронштейна со вставленным в него стаканом и акселерометром лежит на оси цапф. Для регулировки центра тяжести в нихней части основного кронштейна на резьбе закреплен груз.
Признак 1 На концах цапф, выходящих из дополнительного кронштейна, подвешен основной кронштейн с возможностью поворота его на цапфах с последующей фиксацией, которая осуществляется, например, при помощи винта - признак является новым по отношению к прототипу, неизвестно из других технических решений его использование для настройки акселерометров, необходим для обеспечения поворота акселерометра в вертикальной плоскости на любой угол, а следовательно и обеспечения действия инерционных сил на акселерометр под любым углом и совместно с признаками 2,3,4,5,6,7,8 служит для достижения поставленной цели - возможности проверки настройки акселерометров как однонаправленной, так и многонаправленной чувствительности.
Признак 2. В основной кронштейн вставлен стакан с возможностью поворота вокруг оси 00 с последующей фиксацией относительно корпуса.
Признак является новым по отношению к прототипу, неизвестно из других технических решений его использование для настройки акселерометров, необходим для обеспечения поворота акселерометра вокруг оси на любой угол и совместно с признаками 1,3,4,5,6,7,8 служит для достижения поставленной цели.
Признак 3. В основной кронштейн на резьбе установлен винт, служащий для фиксации стакана.
Признак является новым по отношению к прототипу, необходим для обеспечения фиксации стакана в заданном положении и совместное признаками 1,2,4,5,6,7,8 служит для достижения поставленной цели.
Признак4. На основном кронштейне закреплена шкала, ось которой совпадает с осью цапф, а на кронштейне закреплен указатель.
Признак необходим для определения угла наклона оси основного кронштейна по отношению к оси кронштейна, является новым по отношению к прототипу, неизвестно из других технических решений его использование для настройки акселерометров и совместно с признаками 1,2,3,4,5,6,7,8 служит для достижения поставленной цели.
Признак 5. На верхнем торце стакана имеется указатель, а на торце основного кронштейна шкала.
Признак нов по отношению к прототипу, необходим для определения угла поворота стакана вокруг оси 00 от исходного положения. Признак совместно с признаками 1,2,3,4,6,7,8 служит для достижения поставленной цели.
Признак 6. На вилке и дополнительном кронштейне имеются указатели. Признак нов по отношению к прототипу, необходим
для определения положения кронштейна относительно вилки.
Признак совместно с признаками 1,2,3,4,5,7,8 служит для достижения поставленной цели.
Признак 7, В нижней части основного кронштейна на резьбе закреплен груз с возможностью перемещения вдоль оси,
Признак нов по отношению к прототи0 пу, необходим для регулировки положения центра тяжести системы: дополнительный кронштейн, основной кронштейн, стакан, акселерометр, чтобы ее центр тяжести лежал на оси цапф при различных углах накло5 на, оси основного кронштейна по отношению к дополнительному кронштейну.
Признак 8. В верхней части стакана на резь&е установлена резьбовая пробка. При0 знак нов по отношению к прототипу, необходим для крепления акселерометра и совместно с признаками 1,2,3,4,5,6,7 служит для достижения поставленной цели.
Таким образом все вышеперечислен5 ные признаки являются существенными, т.к. необходимы для достижения поставленной цели.
Перечень фигур графических изображений.
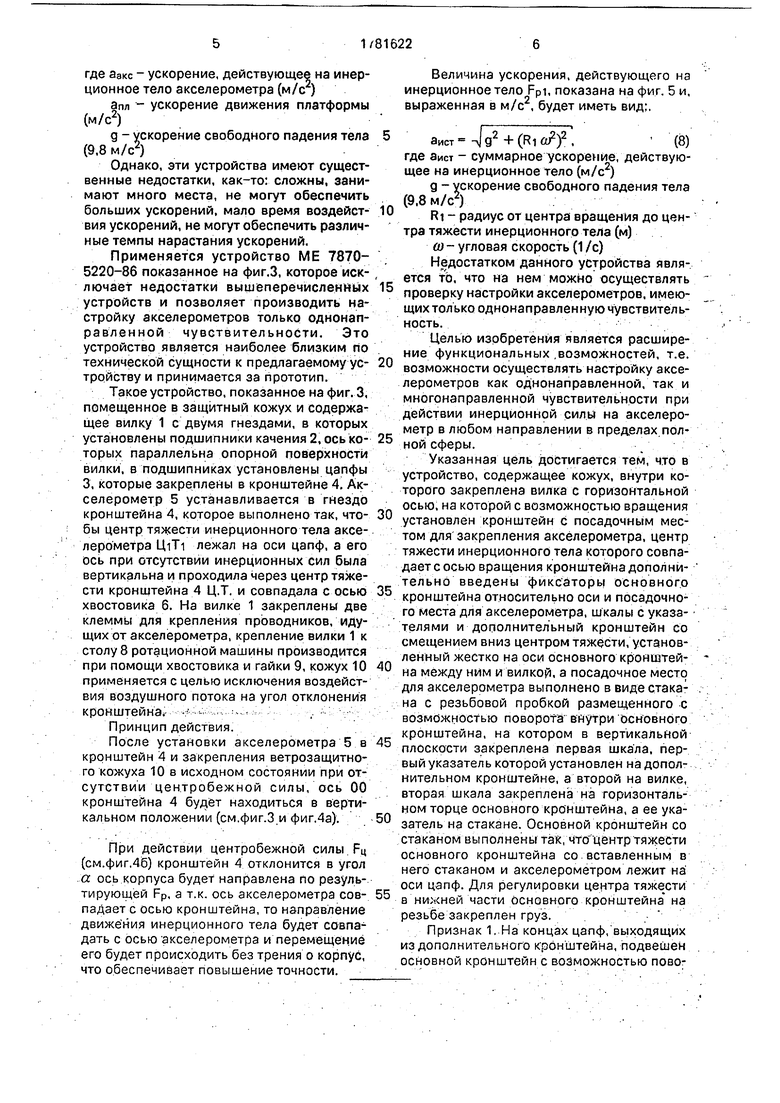
0 На фиг. 1 изображена типовая конструкция акселерометра многонаправленной чувствительности, где 1 - корпус, 2 - крышка, 3 - верхний контакт, 4 инерционное тело, 5 - пружина,
5 На фиг. 2 показано три полож ения инерционного тела при настройке, где 1 - корпус, 4 - инерционное тело,8 - стол ротационной установки, РПр - вектор силы пружины, Р - вектор силы веса инерционного тела, Рц 0 вектор центробежной силы.
На фиг. 3 показан прототип, где 1 - вилка, 2 - подшипники, 3 - цапфы, 4 - кронштейн, 5 - акселерометр, 6 - хвостовик, 7 - клеммы, 8 - стол ротационной установки, 9
5 - гайка, 10 - кожух.
На фиг. 4 показан прототип в исходном и рабочем положениях, где 3 - цапфы, 4 - кронштейн, 5 - акселерометр, 8 - стол ротационной установки, 11 - станина ротацион0 ной установки, Р - вектор силы веса корпуса с акселерометром, Рц - вектор центробежной силы, Fp- вектор результирующей силы. На фиг 5 показано действие сил на кронштейн и на инерционное тело, где UlTi
5 - центр тяжести инерционного тела; Рц1 - инерционная сила, действующая на инерционное тело PI - вес инерционного тела; а- угол or , Мчния оси кронштейна от вертикали, Li, - 1,оитр тяжести кронштейна; Рц- цвг i ил сила, действующая на кронштейны; Р - вес кронштейна с акселерометром; RI - радиус от центра вращения до UiTi инерционного тела.
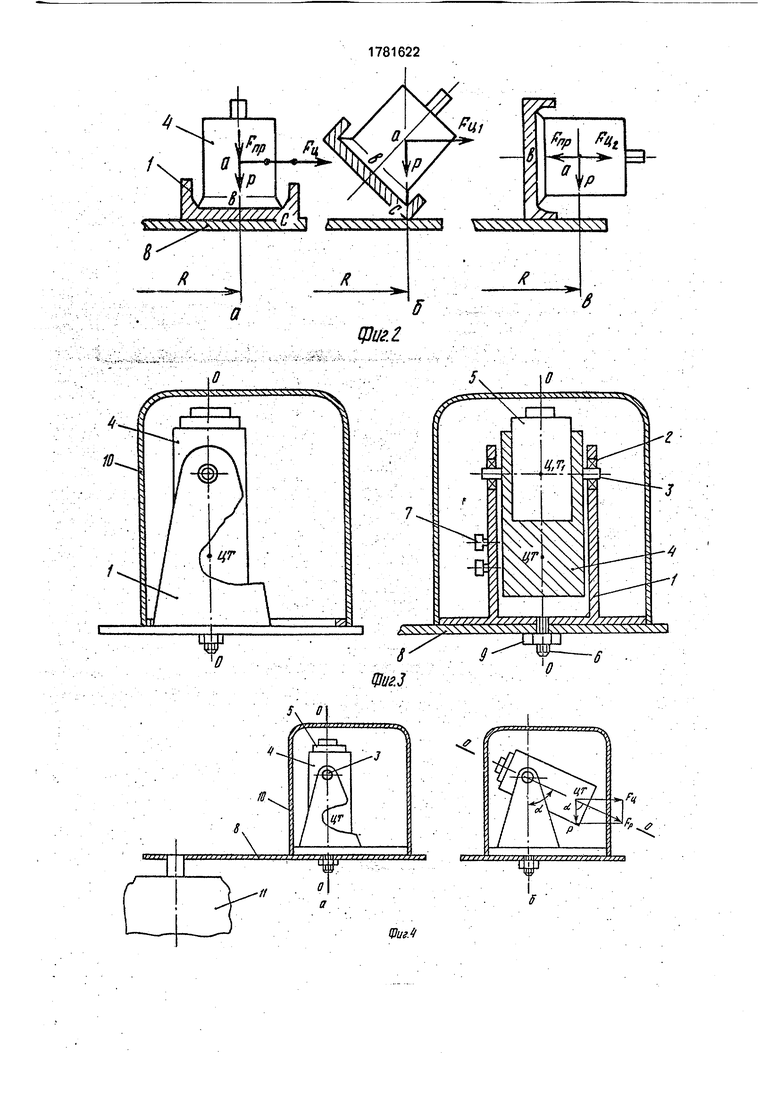
На фиг. 6 показано предлагаемое устройство, где 1 - вилка, 2 - хвостовик, 3 - указатель, 4 - подшипник, 5 - цапфы, б - дополнительный кронштейн, 7 - указатель, 8 - основной кронштейн, 9 - винт, 10 - шкала, 11 - шкала, 12 -стакан, 13 -винт, 14
-указатель, 15 - резьбовая пробка, 16 - акселерометр, 17 - груз, 18 - кожух.
На фиг. 7 показано три положения основного кронштейна развернутого относительно дополнительного кронштейна, где 6
-дополнительный кронштейн, 7 - указатель, 8 - корпус, 11 - шкала, 12 - стакан, F, Fi, Fa - направления силы тяжести инерционного тела в исходном состоянии.
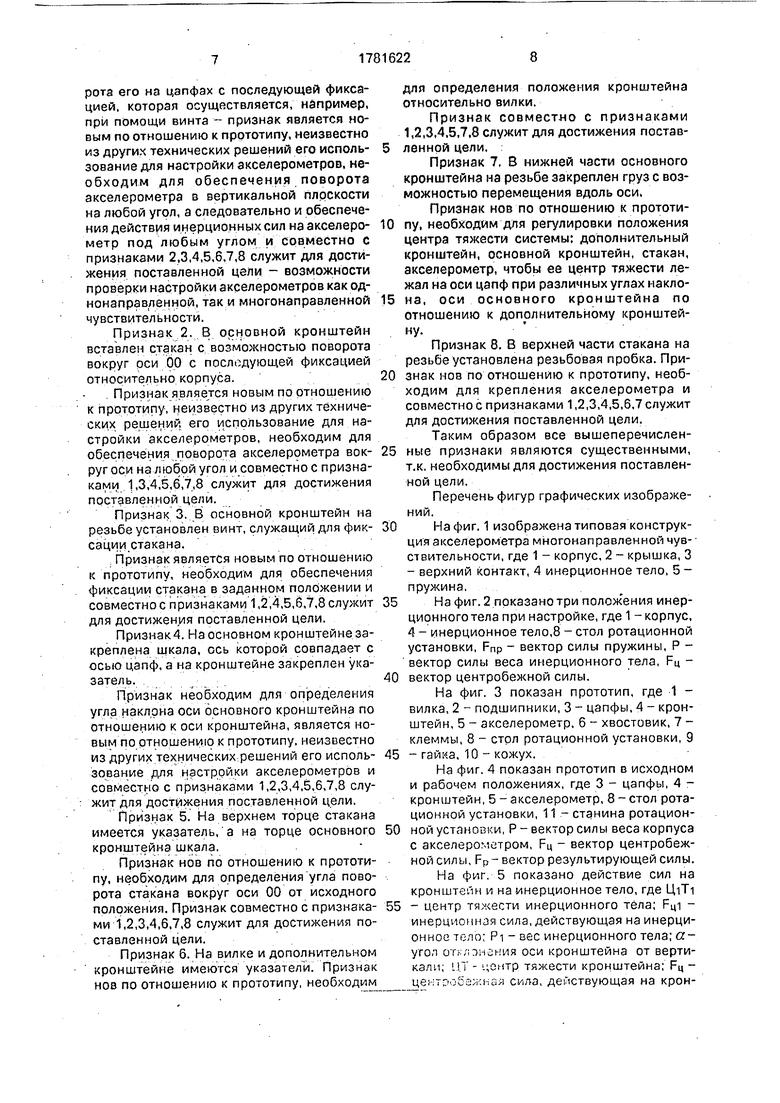
На фиг. 8 показано положения основного кронштейна при действии на него центробежных сил, где RI - расстояние от центра вращения до центра тяжести инерционного тела; UiTi - центр тяжести инерционного тела; РЦ1 - центробежная сила, действующая на инерционное тело; Pi -сила тяжести инерционного тела; Fpi - результирующая сила от Рц1 и PI; ЦТ - центр тяжести дополнительного кронштейна; Рц- центробежная сила, действующая на кронштейн; Р - сила тяжести дополнительного кронштейна; Fp - результирующая сила от Рци Р.
На фиг. 6 показана конструкция предлагаемого устройства.
Устройство включает в себя вилку 1 с хвостовиком 2, указателем 3 и подшипниками 4, в подшипниках установлены цапфы 5, закрепленные на дополнительном кронштейне 6, на котором закреплен указатель 7, на концах цапф, выходящих из дополнительного кронштейна, подвешен основной кронштейн 8 с возможностью поворота его на цапфах с последующей фиксацией винтом 9. На торце основного кронштейна 8 нанесена шкала 10, вторая шкала 11 закреплена на корпусе в вертикальной плоскости.
В основной кронштейн 8 вставлен стакан 12с возможностью поворота вокруг оси симметрии и фиксацией его винтом 13, на торце стакана 12 нанесен указатель 14. В верхней части стакана 12 на резьбе крепится резьбовая пробка 15. служащая для крепления акселерометра. На нижнем конце основного кронштейна 8 на резьбе закреплен груз 17, служащий для уравновешивания относительно оси цапф, подвешенной на цапфах системы. Кожух 18 крепится к основанию вилки и применяется с целью исключения воздействия потока на угол отклонения кронштейна.
Подготовка к работе и принцип действия следующие; установить акселерометр 16 в стакан 12 (см.фиг.6), который выполнен так, чтобы центр тяжести инерционного тела акселерометра UiTi лежал на оси цапф. а его ось при отсутствии инерционных сил была вертикальна и проходила через центр тяжести дополнительного кронштейна 6 ЦТ и совпадала с осью хвостовика 2, после чего
акселерометр 16 закрепить резьбовой пробкой 15, подсоединить проводники .кселеро- метра, пропущенные чере отверстие в пробке 15, к клеммам, закрепленным на вилке 1 (йа фиг. 6 не показан) про верить, что
указатель 7 находится против нуля на шкале 11 (см.фиг.6 и положени а на фиг.7) и чтобы указатель 3 находился против риски, нанесенной на указателе 7 в этом случае ось 00 будет вертикальна и соответствовать
положению а на фиг. 7 (пунктиром обозначено инерционное тэло акселерометра). Закрыть ветрозащитным кожухом 18.
Включить ротационную установку постепенно увеличивая обороты. Ось дополнительного кронштейна 00 будет отклоняться на угол см.фиг.8, на которой показано положение основного кронштейна 8 относительно дополнительного кронштейна 6 соответствующее положению, показанному
на фиг.7б.
Т.к. равнодействующая сила Fpi, деист; вующая на инерционное тело акселерометра, будет совпадать с осью дополнительного кро нштейна, ускорение, действующее на
инерционное тело, будет определяться следующим образом:
Сила РЦ1 создаст ускорение аЦ1 RI of , (9)
где Fui - центробежное ускорение (м/с2)
RI - радиус от центра вращения до центра тяжести инерционного тела (м) (О - угловая скорость (1 /с).
Суммарное ускорение, действующее на инерционное тело, будет иметь вид
|
а1 -л|д2 + 1а)2,(10)
где ai-суммарное ускорение, действующее на инерционное тело (м/с2);
g -ускорение свободно падающего тела
9,8 м/с2 создаваемое весом Pi
Определение угловой скорости производится устройством, показывающим текущее значение угловой скорости со,В момент срабатывания акселерометра с его контактов поступает сигнал на запоминающее устройство для замера угловой скорости, величина которой фиксируется на специальном табло. Для определения ускорений имеются таблицы, выполненные по форме,
приведенной ниже (расчеты приведены в единицах д). Оператор, зная радиус и ш находит ближайшее значение ускорений. Интервалы между соседними значениями таблицы и количество знаков после запятой, зависит от требуемой точности настройки.
При настройке акселерометров в приспособлении, обеспечивающем фиксацию акселерометра в положениях, показанных на фиг. 2, оператор должен взять показания в столбце 3 приведенной таблицы и поправку в другой таблице (в описании не приведена), которая составляется для каждого акселерометра отдельно и для необходимого количества положений, число которых для акселерометров сферической чувствительности может быть очень большим.
При настройке акселерометров в приспособлении, показанном на фиг. 4 и фиг.б оператор должен взять показания в столбце 4 без каких либо поправок
Для проверки настройки акселерометра при действии силы в любом заданном направлении в пределах сферы необходимо акселерометр 16 в устройстве (см.фиг, 6) установить так, чтобы заданное направление силы, действующей на акселерометр, совпа- дапо с осью дополнительного кронштейна 6, ориентация по углу /3(см.фиг. 1 и 7) обеспечивается за счет поворота основного кронштейна 8 (см.фиг.6) на цапфах 5 с последующей фиксацией винтом 9, угол определяется при помощи шкалы 11 и указателя 7, ориентация по углу у(см.фиг.1) обеспечивается за счет поворота вокруг оси стакана 12, в котором закреплен акселерометр 16 при помощи пробки 15, фиксация стакана производится при помощи винта 13, угол поворота определяется по шкале 10.
Рассмотрим конкретные примеры.
Для определения настройки от силы Fa (см.фиг. 1) необходимо акселерометр уста- повить так как показано на фиг.7а, т.е. ось акселерометра совпадает с осью дополнительного кронштейна. Закрепив акселерометр, включить ротационную установку и увеличивать обороты до срабатывания акселерометра, зная угловую скорость при срабатывании, в столбце 4 определяют ускорение.
Для определения настройки от силы Pi, лежащей в плоскости АА и направленной а сторону отметки 1 (см.фиг. 1) необходимо стакан 12 вместе с акселерометром 16 (см.фиг.б) развернуть на угол у т.е. отметку 1 (см.фиг. 1). лежащую в плоскости АА, перевести D плоскость ББ (например, в отметку 2), плоскость Б Б перпендикулярна на оси цапф (см.фмг.6, отметка о и 180 шкалы 10 лежит в плоскости Б Б) после чего стакан
12 зафиксировать винтом 13, указатель 14 должен сместиться от О на шкале 10 на угол у в данн ом случае на 90°, затем развернуть основной кронштейн так (см.фиг.7б),
чтобы FI совпадала с осью дополнительного кронштейна 6, для чего необходимо отпустить винт 9 и повернуть корпус 8 на угол ft например, на 45°, после чего основной кронштейн 8 зафиксировать винтом 9.
Проверять, чтобы указатель 3 находился напротив риски указателя 7, если совмещения нет, значит ось дополнительного кронштейна не вертикальна и необходимо произвести корректировку, которая производится при помощи груза 17. Дальнейший процесс настройки описан в предыдущем примере. Положение устройства при действии центробежной силы показано на фиг. 8. Положение акселерометра при настройке при действии силы F (см фиг.1) показано на фиг. 7в.
Таким образом за счет возможности поворота стакана 12 (см.фиг.6) вокруг своей оси и основного кронштейна 3 вокруг оси
цапф на 360° с последующей их фиксацией возможно обеспечить направление действующей на акселерометр инерционной силы в любом направлении сферы.
Использование изобретения позволяет
за счет расширения функциональных возможностей существующего устройства, предназначенного для настройки акселерометров однонаправленной чувствительности, производить настройку акселерометров многонаправленной чувствительности вплоть до сферической при сохранении обеспечения, высокой точности.
Посравнению с известным устройством для настройки акселерометров сферической
чувствительности предлагаемое устройство позволяет упростить процесс настройки, т.к. не требуется производить дополнительные расчеты поправок в зависимости от положения акселерометра.
Формула изобретения
Устройство для настройки акселерометра на центрифуге, содержащее , внутри которого закреплена вилка с горизонтальной осью, на которой с возможностью вращения установлен основной кронштейн с посадочным местом для закрепления акселерометра, центр тяжести инерционного тела которого совпадает с осью вращения кронштейна, отличающ е е с я тем, что, с целью расширения функциональных возможностей за счет обеспечения настройки акселерометров многонаправленной чувствительности, в чего введены фиксаторы основного кронштейна относительно оси и посадочного места для акселерометра, шкалы с указателями и дополнительный кронштейн со смещенным вниз центром тяжести, установленный жестко на оси основного кронштейна между ним и вилкой, а посадочное место для акселерометра выполнено в виде стакана с резь- бовой пробкой, размещенного с
возможностью поворота внутри основного кронштейна, на котором в вертикальной плоскости закреплена первая шкала, первый указатель которой установлен на дополнительном кронштейне, а второй - на вилке, вторая шкала закреплена на горизонтальном торце основноготсроншгейна, а ее указатель - на стакане.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для градуировки акселерометров | 1974 |
|
SU514245A1 |
| Прибор для демонстрации законов вращательного движения | 1979 |
|
SU989576A1 |
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1990 |
|
RU2033632C1 |
| СТРУННЫЙ АКСЕЛЕРОМЕТР | 1981 |
|
SU1840364A1 |
| Расточный патрон | 1973 |
|
SU516470A1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| Устройство для испытания изделий на динамические нагрузки | 1983 |
|
SU1087794A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ИЗДЕЛИЙ НА ВОЗДЕЙСТВИЕ ИМПУЛЬСНЫХ УСКОРЕНИЙ | 1992 |
|
RU2069332C1 |
| ИНТЕГРИРУЮЩИЙ АКСЕЛЕРОМЕТР | 1973 |
|
SU375554A1 |

Использование: изобретение относится к приборостроению, а точнее к устройствам для настройки акселерометров.Целью изобретения является возможность настройки акселерометров многонаправленной чувствительности за счет введения в конструкцию дополнительного кронштейна с указателем, в котором закреплены цапфы, установленные в подшипниках таким образом, что их ось перпендикулярна оси допол- нительного кронштейна, на цапфах подвешен основной кронштейн с возможностью поворота его с последующей фиксацией винтом, на торце корпуса нанесена шкала, сбоку закреплена вторая шкала, ось которой совпадает с осью цапф, на нижнем конце основного кронштейна на резьбе закреплен груз, в корпус вставлен стакан с возможностью поворота вокруг оси симметрии и фиксации его в основном кронштейне, на торце стакана нанесен указатель, в стакане на резьбе крепится крышка, на вилке закреплен указатель. 8 ил. 1 табл. Ё
Пример выполнения таблиц
Л Фиг.1
м
I
„ЛL1„1
f д7 I1 f f -f fJ-Г/ flfY 7 7i/У /
Eb-
ЯЧХЧЧ ЗХ
Ъ
/} V
S Mtb
Ш1Ш
Фиг.8
| Устройство для градуировки линейных акселерометров | 1974 |
|
SU489039A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
