чен к выходу определителя угла между векторами тока и потокосцепле- ния, выход сумматора подютючен ко второму входу формирователя логического сигнала заданного тока, выход задатчика амплитуды потокосцепле- ния подключен к другому входу элемента сравнения, а выход измерителя
«
Изобретение относится к электротехнике, а именно к частотно-регулируемым асинхронным электроприводам и может быть использовано в установках, где асинхронная машина применяется в качестве нагрузочног устройства, например, в испытательных стендах двигателей.
Целью изобретения является повышение точности регулирования,
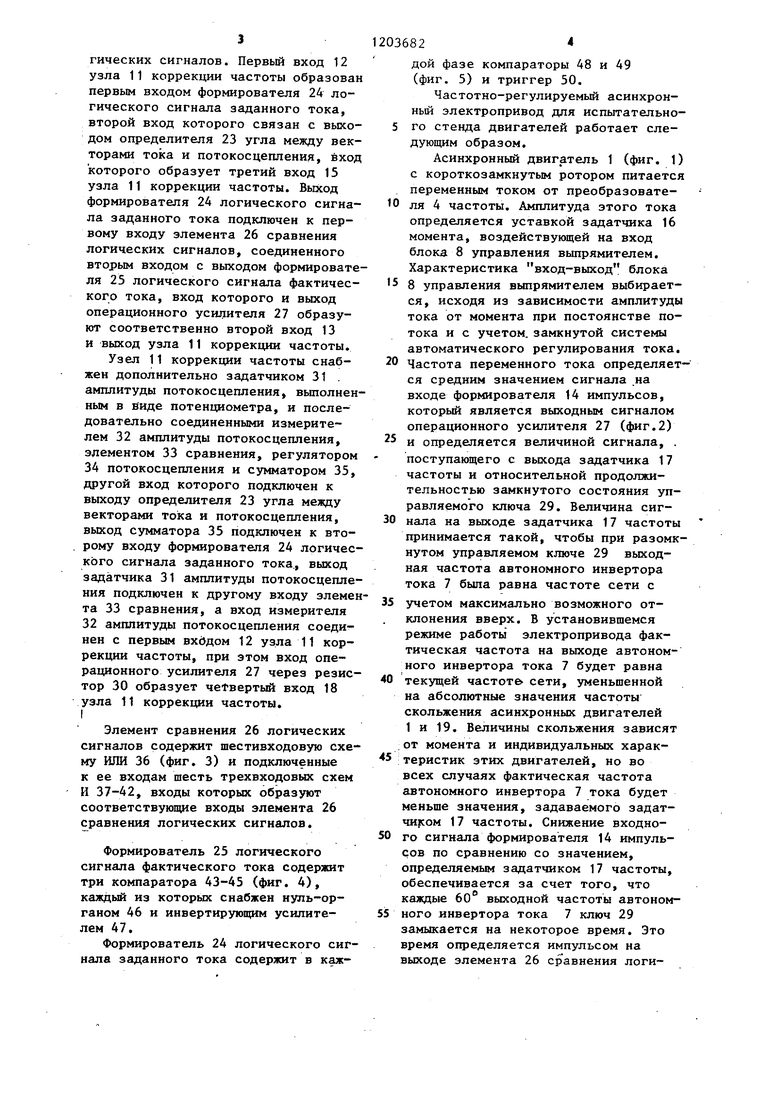
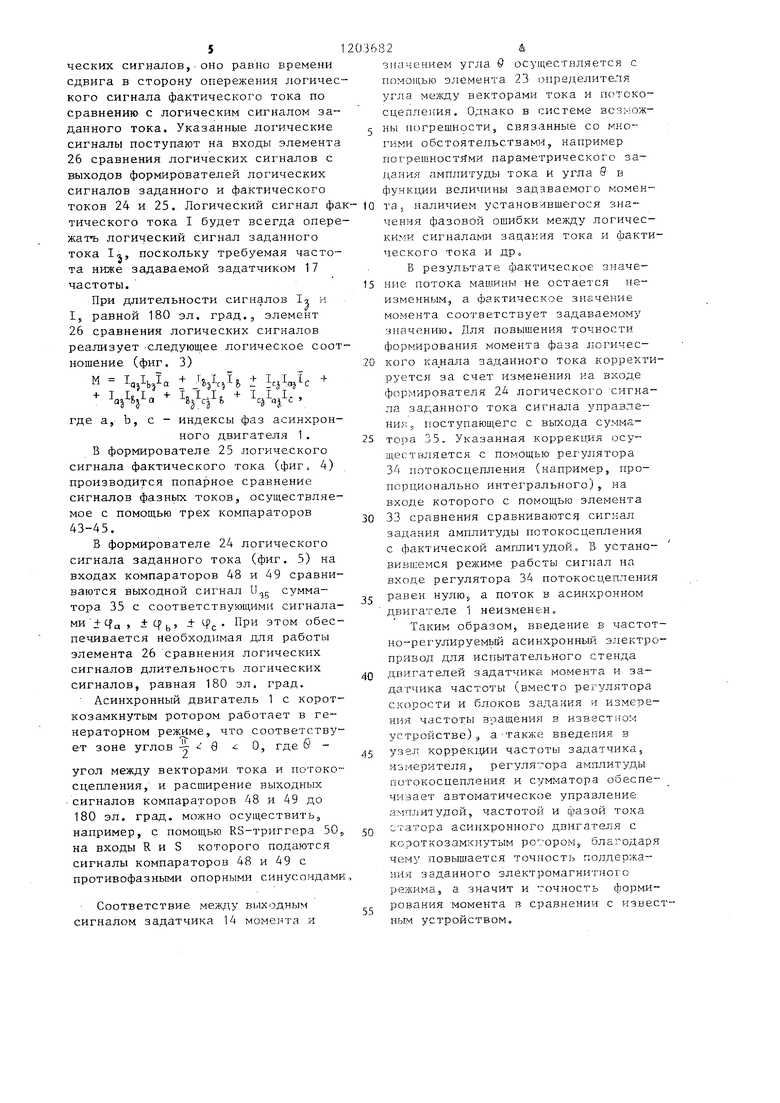
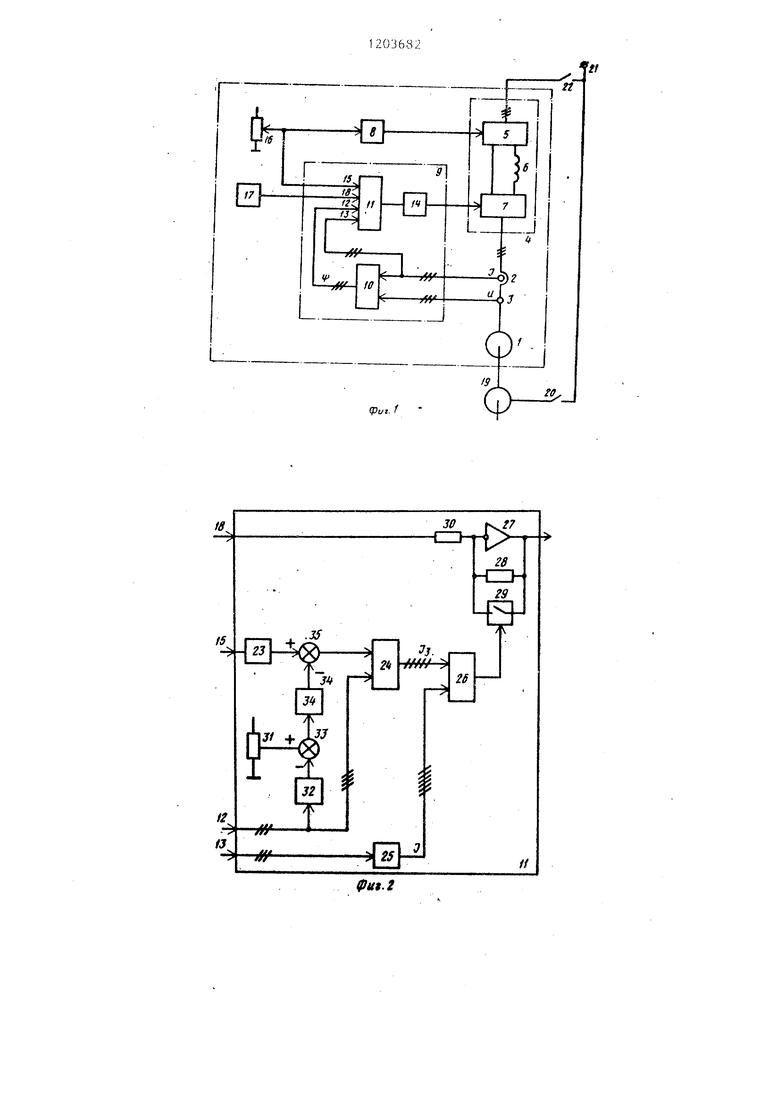
На фиг. 1.представлена функциональная схема частотно-регулируемого асинхронного электропривода для испытательного стенда двигателей, на фиг, 2 функциональная схема узла коррекции частоты, на фиг. 3 - схема элемента сравнения логических сигналов, на фиг. 4 и 5 - схемы формирователей логичесго Сигнала фактического и заданно- го токов соответственно.
Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей содержит асинхронный двигатель 1 (фиг. 1) с короткозамкнутым ротором, статор ные обмотки которого через датчик 2 фазных токов и датчик 3 фазных напряжений подключены к выходам преобразователя частоты 4, снабженно го последовательно соединенными управляемым вьшря мителем 5, дросселем 6 и автономным инвертором 7 TOKaj блок 8 управления выпрямителем и блок 9 управления инвертором снабженный формирователем 10 сигнала потокосцепления, подключенным входами к выходам датчика 2 фазных токов и к выходам датчика 3 фазньк напряжений, узлом 11 коррекции час тоты, подключенным первым входом 12 к выходу формирователя 10 сигна03682
амшштудь потокосцепления сг)единен с первым входом узла коррек 1ни частотыJ при этом вход операционного усилителя образует четвертьй вход узла коррекции частоты, по,г;,- ключенньш к вькоду задатчика частоты, а третий вход узла коррекции частоты соединен с выходом задатчика момента„
ла потокосцепления, а вторым входом 13 к вьгходу датчика 2 фазных токов. Блок 9 управления инвертором снабжен, кроме того, формирователем 14 импульсов, подключенным входом к узла 1 1 коррекции частоты, а выходом к управляющему входу автономного инвертора 7 тока. Вход блока 8 управления вьгпрямителем объединен с третьим входом 15 узла 11 коррекции частоты и подключен к вьЕходу введенного задатчика 16 момента, выполненного в виде потенциометра. Выход введенного задатчика 17 частоты подключен к четвертому входу 18 узла 11 коррекции частоты,
Вал асинхронного двигателя 1 с короткозамкнутым ротором механическ связан с валом другого двигателя 19 испытательного стенда, обмотки которого через контактную группу 20 соединены с клеммами 21 для подключения питающей сети.
Силовые входы управляемого выпрямителя 5 через контактную группу 22 соединены с клеммами 21 для подключения питающей сети,
11 коррекид и частоты снаб- ;;ен определителем 23 (фиг, 2) угла векторами: тока и потокосцепления, формирователем 24 логическо- г о сигнала заданного тока, формирователем 25 логического сигнала фактического тока, элементом 26 сравнения логических сигналов и операционным усилителем 27, в цепь обратной связи которого включены параллельно соединенные резистор 28 и управляемый ключ 29,, а на входе включен резистор 30. Управляющий вход управляемого ключа 29 соединен с выходом элемента 26 сравнения логических сигналов. Первый вход 12 узла 11 коррекции частоты образован первым входом формирователя 24 логического сигнала заданного тока, второй вход которого связан с выходом определителя 23 угла между векторами тока и потокосцепления, вход которого образует третий вход 15 узла 11 коррекции частоты. Вькод формирователя 24 логического сигнала заданного тока подключен к первому входу элемента 26 сравнения логических сигналов, соединенного вторьм входом с выходом формирователя 25 логического сигнала фактического тока, вход которого и выход операционного усилителя 27 образуют соответственно второй вход 13 и выход узла 11 коррекции частоты. Узел 11 коррекции частоты снабжен дополнительно задатчиком 31 . амплитуды потокосцепления, вьшолнен ным в биде потенциометра, и последовательно соединенными измерителем 32 амплитуды потокосцепления, элементом 33 сравнения, регулятором 34 потокосцепления и сумматором 35, другой вход которого подключен к выходу определителя 23 угла между векторами тока и потокосцепления, выход сумматора 35 подключен к второму входу формирователя 24 логического сигнала заданного тока., выход задатчика 31 амплитуды потокосцепления подключен к другому входу элемета 33 сравнения, а вход измерителя 32 амплитуды потокосцепления соединен с первым вхддом 12 узла 11 коррекции частоты, при этом вход операционного усилителя 27 через резистор 30 образует четвертый вход 18 узла 11 коррекции частоты. I
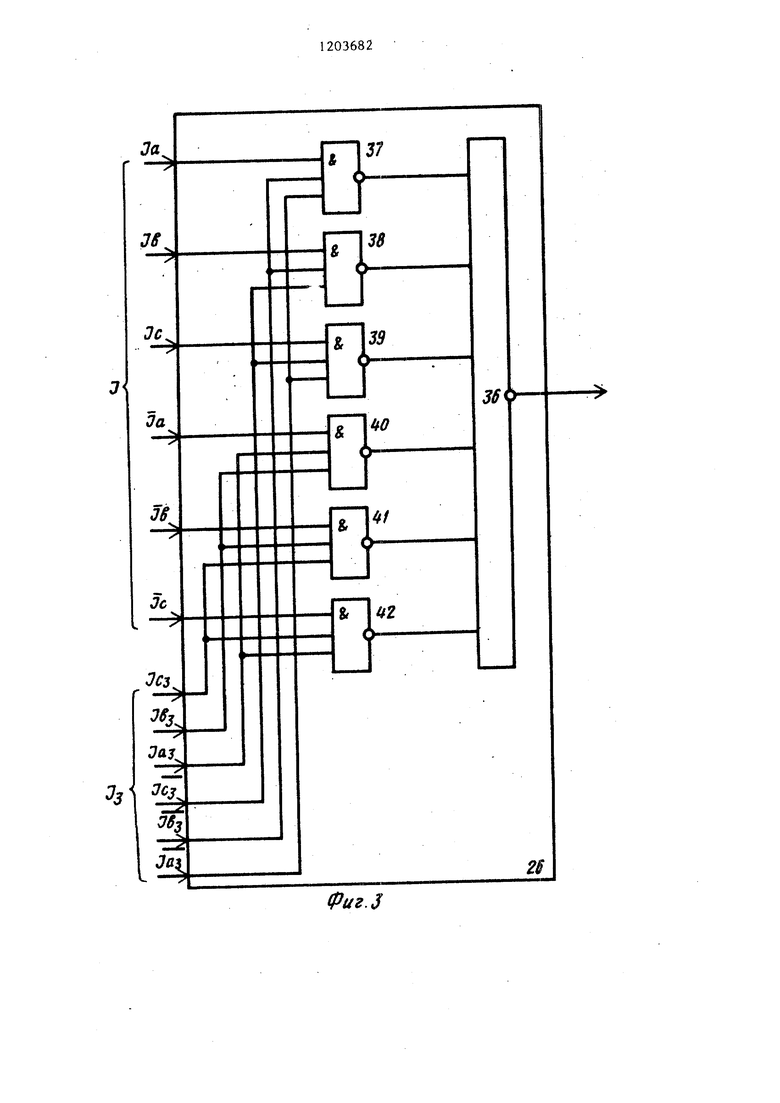
Элемент сравнения 26 логических сигналов содержит шестивходовую схему ИЛИ 36 (фиг. 3) и подключенные к ее входам шесть трехвходовых схем И 37-42, входы которых образуют соответствующие входы элемента 26 сравнения логических сигналов.
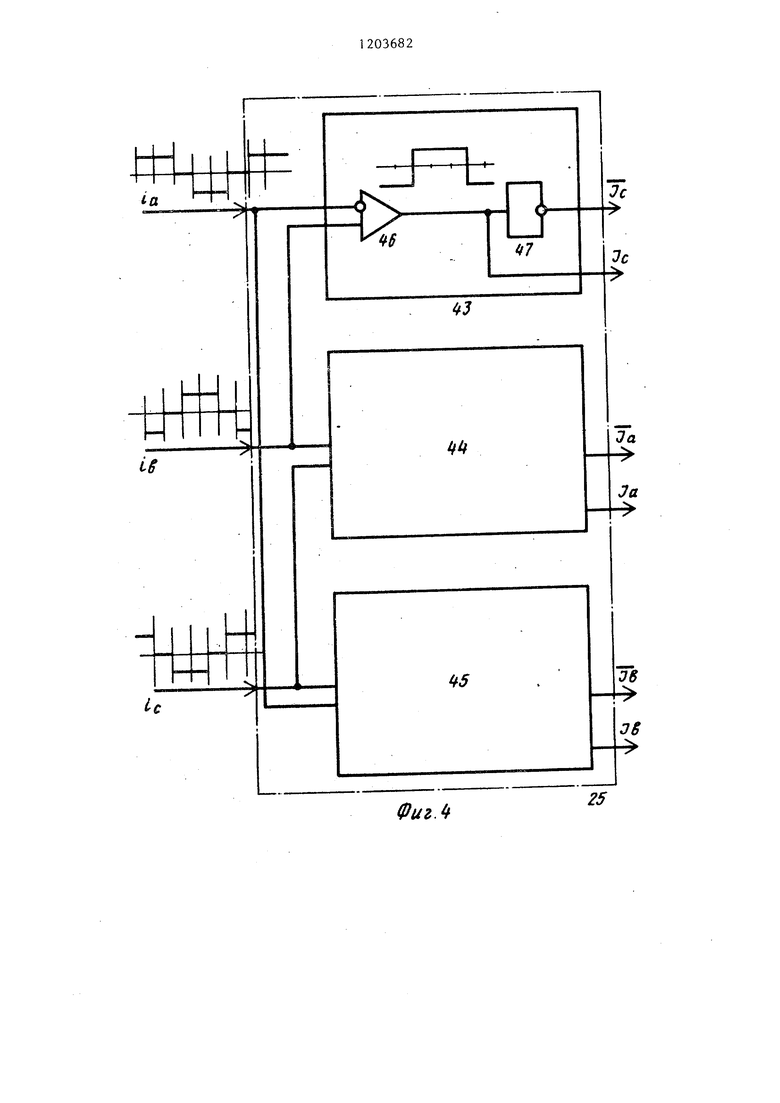
Формирователь 25 логического сигнала фактического тока содержит три компаратора 43-45 (фиг. 4), каждый из которых снабжен нуль-органом 46 и инвертирующим усилителем 47.
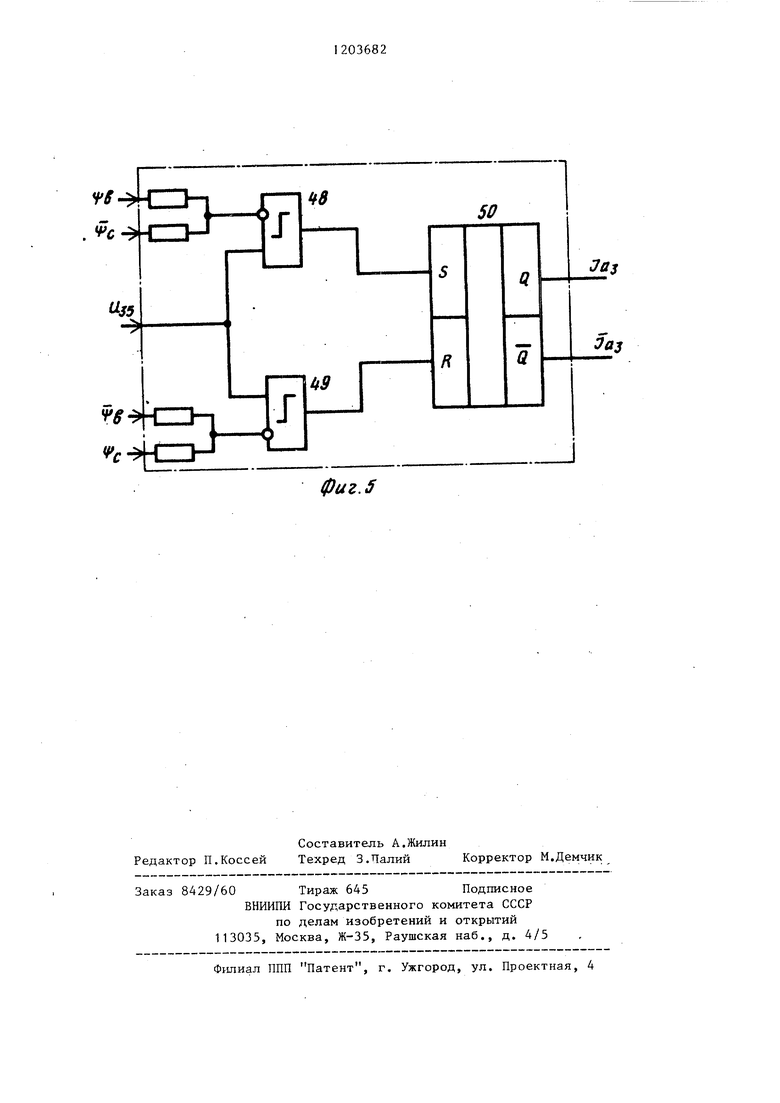
Формирователь 24 логического сигнала заданного тока содержит в каж203682
дои фазе компараторы 48 и 49 (фиг. 5) и триггер 50.
Частотно-регулируемый асинхрон- ньм электропривод для испытательно- 5 го стенда двигателей работает следующим образом.
Асинхронный двигатель 1 (фиг. 1) с короткозамкнутым ротором питается переменным током от преобразовате 0 ля 4 частоты. Амплитуда этого тока определяется уставкой задатчика 16 момента, воздействующей на вход блока 8 управления выпрямителем. Характеристика вход-выход блока 5 8 управления выпрямителем выбирается, исходя из зависимости амплитуды тока от момента при постоянстве потока и с учетом, замкнутой системы автоматического регулирования тока.
20 Частота переменного тока определяется средним значением сигнала .на входе формирователя 14 импульсов, который является выходным сигналом операционного усилителя 27 (фиг.2)
25 и определяется величиной сигнала, . поступающего с выхода задатчика 17 частоты и относительной продолжительностью замкнутого состояния управляемого ключа 29. Величина сиг30 нала на выходе задатчика 17 частоты принимается такой, чтобы при разомкнутом управляемом ключе 29 выходная частота автономного инвертора тока 7 была равна частоте сети с
35 учетом максимально возможного отклонения вверх. В установившемся режиме работы электропривода фактическая частота на выходе автономного инвертора тока 7 будет равна
40 текущей частоте сети, уменьшенной на абсолютные значения частоты скольжения асинхронных двигателей 1 и 19. Величины скольжения зависят от момента и индивидуальных харак 5 теристик этих двигателей, но во всех случаях фактическая частота автономного инвертора 7 тока будет меньше значения, задаваемого задатчиком 17 частоты. Снижение входно50 го сигнала формирователя 14 импульсов по сравнению со значением, определяемым задатчиком 17 частоты, обеспечивается за счет того, что каждые 60 выходной частоты автоном55 ного инвертора тока 7 ключ 29
замыкается на некоторое время. Это время определяется импульсом на выходе элемента 26 сравнения логи5
ческих сигналов,оно равно времени сдвига в сторону опережения логического сигнала фактического тока по сравнению с логическим сигналом заданного тока. Указанные логические сигналы поступают на входы элемента 26 сравнения логических сигналов с выходов формирователей логических сигналов заданного и фактического токов 24 и 25. Логический сигнал фа тического тока I будет всегда опережать логический сигнал заданного тока 1а, поскольку требуемая частота ниже задаваемой задатчиком 17 частоты.
При длительности сигналов Ij и 1, равной 180 эл. град., элемент 26 сравнения логических сигналов реализует -следующее логическое соотношение (фиг, 3)
М 1,ДьДа + i +
- - VV где a, b, с - индексы фаз асинхронного двигателя 1.
В формирователе 25 логического сигнала фактического тока (фиг. 4) производится попарное сравнение сигналов фазньгх токов, осуществляемое с помощью трех компараторов 43-45.
В формирователе 24 логического сигнала заданного тока (фиг. 5) на входах компараторов 48 и 49 сравниваются выходной сигнал U,- сумматора 35 с соответствующими сигнала- ми + cfg , + q) j, + , . При этом обеспечивается необходимая для работы элемента 26 сравнения логических сигналов длительность логических сигналов, равная 180 эл, град.
Асинхронный двигатель 1 с корот- козамкнутым ротором работает в генераторном режиме, что соответствует зоне углов
О, гдеS
2 угол между векторами тока и потоко- сцепления, и расширение выходных сигналов компараторов 48 и 49 до 180 эл. град, можно осуществить, например, с помощью RS-триггера 50, на входы R и S которого подаются сигналы компараторов 48 и 49 с противофазными опорными синусоидами
Соответствие между выходным сигналом задатчика 14 момента и
ю 15
20
25
- .
40
5 0
5
82&
значением угла 9 осуп естнляется с помощью элемента 23 определителя угла между векторами тока и потоко- сцеплеьгия. Однако в системе возможны 11(грешности5 связанные со многими обстоятельствам-, например погреидностЯми параметрического задания амплитуды тока и угла 9 в функции величины задаваемого момента э наличием установившегося значения фазовой ошибки меясду логическими сигналами задания тока и фактического тока и др,
В результате фактическое значение потока машины не остается не- H3MeHHFjiM5 а фактическое значение момента соответствует задаваемому значению. Для повышения точности формирования момента фаза логического заданного тока корректируется за счет изменения на входе формирователя 24 логического -сигнала заданного тока сигнала управле- ни;; 5 поступающего с выхода сумматора 35. Указанная коррекция осуществляется с помощью регулятора 34 потокосцепления (например, пропорционально интегрального), на входе которого с помощью элемента 33 сравнения сравниваются сигнал задания амплитуды потокосцепления с фактической амплитудой. В установившемся режиме работы сигнал на входе регулятора 34 потокосцепления равен НУЛЮ;, а поток в асинхронном двигателе 1 неизмен ;Но
Таким образом,, введение в частот- но-регулируемьй асинхронный электропривод для испытательного стенда двигателей задатт 1ика момента и задатчика частоты (вместо регулятора скорости и блоков задания и измерения частоты BpaoieHHft в известном устройстве), а-также введения в узел коррекции частоты задатчика; измерителя, регулятора амплитуды потокосдепления и сумматора обеспечивает автоматическое управление а;.плитудоЙ5 частотой и фазой тока с-татора асинхронного двнгатепя с короткозамкнутым ро :: Ором, благодаря чему повышается точность поддержания заданного электромагнитного режима, а значит и точность формирования -момента в с)авнении с известным устройством.
Риг. f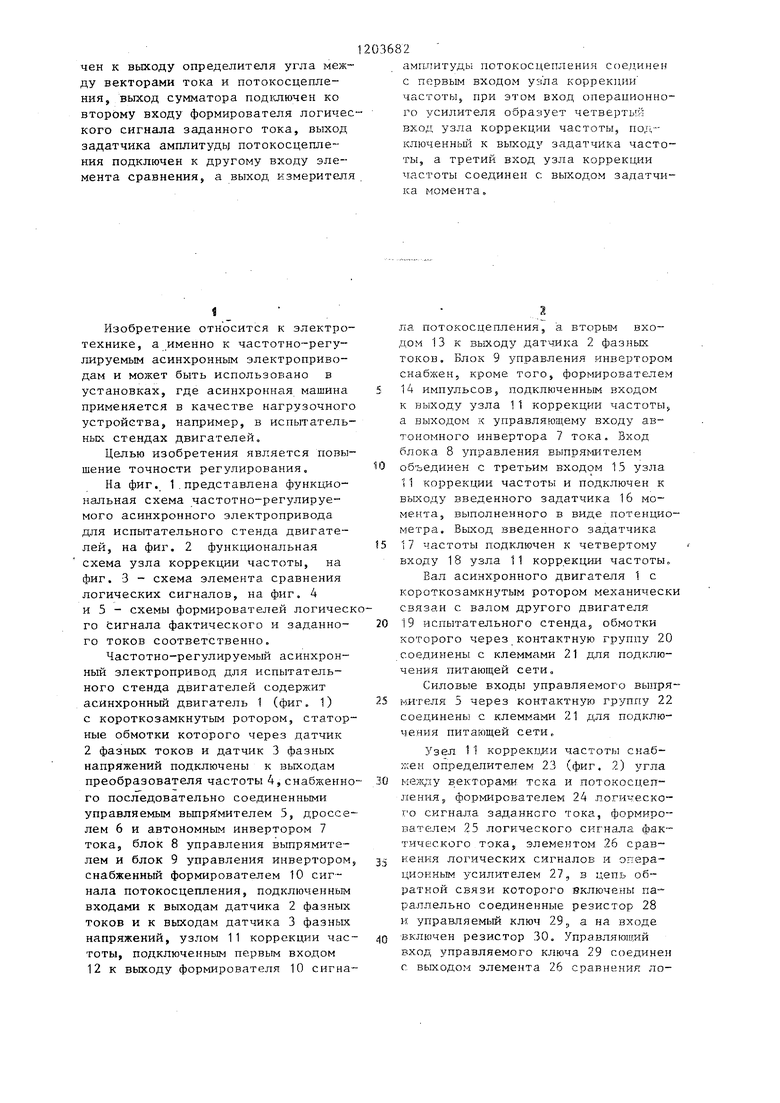
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1334347A1 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1672547A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Электропривод испытательного стенда для асинхронных двигателей | 1985 |
|
SU1283932A1 |
ts
Фиг.З
ta
is
Ic
b
Q
«7
Jf
Jc
tfff
Уа
-
Ja
45
D6
06
Фиг.
25
Зиу
фиг.5
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
