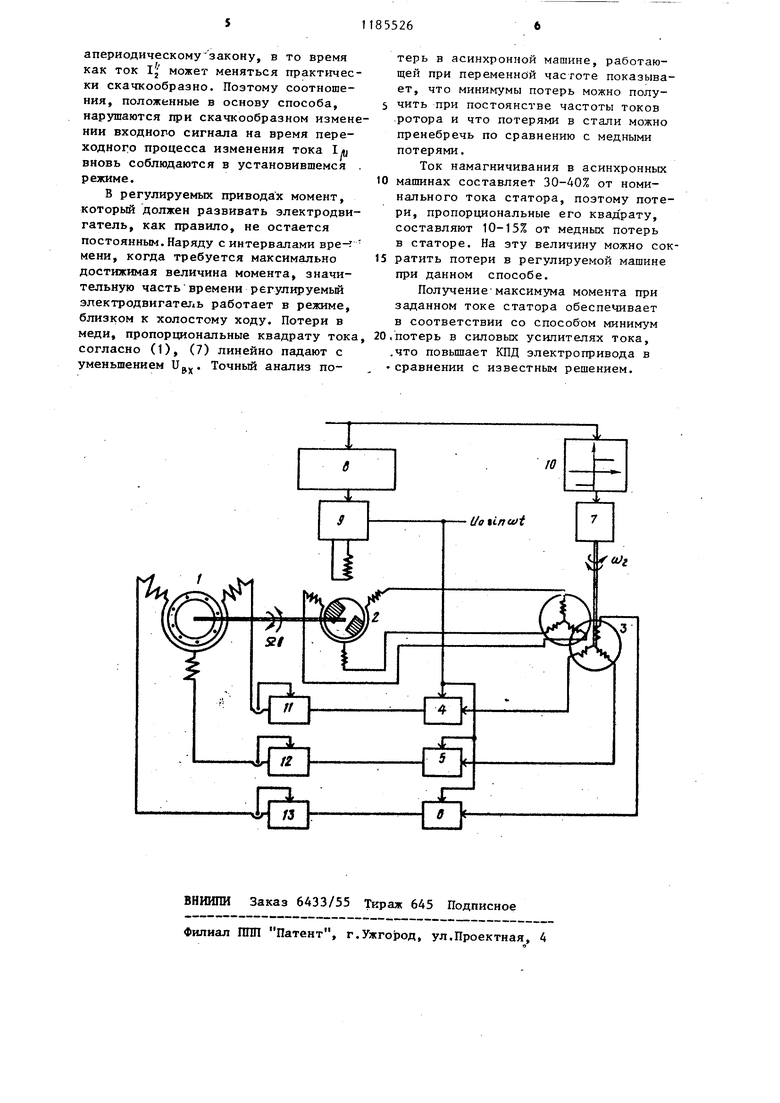
Изобретение относится к электротехнике, а именно к технике регулирования величины момента и скорости вращения электродвигателя путем изменения частоты и величины токов питания статора, и может быть применено в регулируемых электроприводах, в которых ПС условиям эксплуатации необходимо применение асинхрон ного двигателя с короткозамкнутым ротором. Цель изобретения - повышение КПД асинхронной машины в установившемся режиме путем уменьшения потерь и обеспечения максимума момента при заданной величине тока статора. На чертеже представлена структурная схема электропривода, в которой реализуется способ управления моментом асинхронной машины. Электропривод содержит асинхронную машину 1, на валу которой установлен датчик угла 2, дифференциальный сельсин 3, обмотка статора которого соединена пофазно с выходной обмоткой датчика угла 2, а обмотки ротора подключены к входам фазиройанных выпрямителей 4, 5 и 6. Вал дифференциального сельсина 3 жестко связан с валом вспомогательного приборного двигателя 7. Электропривод содержит кроме того элемент вычисления корня квадратного 8, подключенный выходом к входу модулятора 9, соединенного выходом с обмоткой BO3 буждения датчика угла 2, и релейньй элемент 10, подключенный выходом к входу управления вспомогательного приборного двигателя 7. Выходы фазированных выпрямителей 4, 5 и 6 через соответствующие силовые усилители токов 11, 12 и 13 подключены к обмот кам статора асинхронной машины 1. Способ управления моментом асинхронной машины осуществляется в элект ропризоде следующим образом. Измеряют частоту вращения ротора с помощью датчика угла 2, формируют дополнительную частоту с помощью вспомогательного приборного двигателя 7 в функции требуемого момента и регулируют величину тока статора асинхронной машины 1 в зависимости от требуемого момента, а величину частоты этого тока формируют изменекием частоты вращения ротора на вели чину дополнительной частоты. Согласно способу управления моментом асинх ной машины 1 величину тока статоизменяют пропорционально корню дратному из величины требуемого ента, а величину дополнительной тоты поддерживают постоянной. Способ управления моментом асинхной машины записывается следующианалитическими выражениями: (О . (2) Ы2 const, f величина тока статора; К jj - размерный коэффициент тока статора; Ugj - входной сигнал; СО с частота токов статора, Ив - частота вращения ротора/ СО - частота токов ротора. При соблюдении (1), (2), (3) мот, развиваемый асинхронной маши1 независимо от величины скоросвращения, линейно зависит от Ugjj и равна (3) дного сигнала К2 L тр«2 Ьл, - индуктивность намагничивания, ш - число фаз статора р - число пар полюсов статора; Tj- приведенное активное сопротивление ротораJ -j - приведенная индуктивность рассеяния ротора. (3) частоту токов ротора Выберем в ной При такой величине частоты со2 ент будет максимальным при заданвеличине входного сигнала U, авен При соблюдении зависимости (1), , (4) составляющие тока статора „ 1веденный ток ротора Ij и намагчиающий ток «, равны л12(1 + Ь) ь/м П 1ай (L.d7 irr;rrl-d 1 еТак как в реальных асинхронных машинах L iu ((), (7) следует, что составляющие 1 и 1р практически равны между собой и про порционально уменьшаются с падением входного сигнала до нуля (при UB;( 0). Поэтому векторная диаграмма составляющих тока If. представляет собой равнобедренньй треугольник с гипотенузой, равной 1р. Момент асинхронной машины пропор ционален произведению роторного тока Ij на поток, т.е. на 1. Произ ведение катетов будет максимальным, если они равны между собой. Поэтому при выборе cOj согласно (4), обеспечивающем равенство ij и „,, момент пропорциональный их произведению, будет максимально возможным при заданном токе 1,. Входной сигнал V поступает на вход элемента вычисления корня квад ратного 8, на выходе которого форми руется где К - коэффициент пропорциональности. Входной сигнал 1, поступает, кроме того, на вход релейного элеме та 10, на выходе которого сигнал змeнeн по величине и изменяется по знаку при изменении знака U. Напряжение Ug поступает на вход модулятора 9, опорным напряжением для которого служит напряжение Ujj sintot. Выходное напряжение моду лятора 9 питает обмотку возбуждения датчика угла 9, с фазных обмоток ко торого имеют напряжения частоты Со величины которых определяются углом поворота датчика угла 4 и углами пространственного расположения осей его фазных обмоток. При неизмененной скорости вращения Q 9вала асинхронной машины 1 Частот изменения огибающих напряжений фазн обмоток датчика угла 2 также равна I 9g. Эти напряжения питают входные обмотки дифференциального сельсина 3, вал которого вращается со скорос тью 6)j вспомогательным приборным двигателем 7. Направление его вращения определяется знаком входного сигнала Ua, . Напряжение с вьгходных обмоток дифференциального сельсина 3 поступают на входы фазированных выпрямителей 4, 5 и 6, опорными напряжениями для которых явJTяютcя UfjSinoot. С выходов фазированных выпрямителей напряжения, свободные от несущей частоты СО , с частотой () поступают на силовые усилители токов 11, 12 и 13, которые питают асинхронную машину 1 многофазной системой токов, амплитуда которых пропорциональна корню квадратному из входного сигнала , а частота равна ( со,г ). При работе асинхронной машины 1 в двигательном режиме частота токов статора превышает 52 g на велишшу частоты токов ротора н равна (S7g+ Wz). При работе асинхронной машины 1 в тормозном режиме частота тока статора меньше частоты S g на величину частоты токов ротора и равна (Qg-Co)Переход из двигательного в тормозной режим работы обеспечивается реверсом дифференциального сельсина 3 при изменении знака входного сигнала и.,„. Управление моментом асинхронной машины осуществляется независимо от ее скорости вращения. Величина момента определяется входным сигналом Ug, определяющим величину и частоту многофазной системы токов статора. Управляемая по моменту асинхронная мапшна устойчиво работает при любом характере нагрузки без опрокидьшания, так как частота и величина токов ротора строго определяются величиной Ugjj . Контроль величины и формы токов статора, обеспечивающий отсутствие перегрева асинхронной машины и отсутствие перегрузок ключевых элементов силовых усилителей тока, достигается контролем входного сигнала независимо от характера изменения нагрузки и от скорости вращения асинхронной машины. Изменение момента в соответствии со способом связано с изменением величины потока, пропорционального намагничивающему току 1,ц. Изменение потока в асинхронной машине, обладающей значительной индуктивностью намагничивания Lm, происходит по
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным короткозамкнутым двигателем | 1972 |
|
SU587587A1 |
| Следящий электропривод | 1947 |
|
SU74082A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Устройство формирования опорных сигналов системы управления приводом с асинхронной короткозамкнутой машиной | 1975 |
|
SU653709A1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ТРАНЗИСТОРНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1966 |
|
SU186018A1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Способ частотного управления скоростью синхронного двигателя | 1972 |
|
SU515234A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Электропривод | 1988 |
|
SU1529394A1 |
СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОЙ МАШИНЫ, при котором измеряют частоту вращения ротора, формируют дополнительную частоту в функции требуемого момента, регулируют величину тока статора в зависимости от требуемого момента, а величину частоты этого тока формиру- ют изменением частоты врай1ения ротора на величину дополнительной частоты, отличающийся тем, что, с целью повышения КПД машины в установившемся режиме путем уменьшения потерь и обеспечения -максимума момента при заданной величине тока статора, величину тока статора изменяют пропорционально корню квадратному из велшшны требуемого момента, а величину дополto нительной частоты поддерживают пос(Л тоянной.
| Костенко М.П | |||
| Работа многофазного асинхронного двигателя при переменном числе периодов | |||
| - Электричество, № 2, 1925 | |||
| 0 |
|
SU193604A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
