(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Портальный манипулятор | 1982 |
|
SU1139622A1 |
| Указатель коротких замыканий | 1990 |
|
SU1780058A1 |
| Манипулятор | 1988 |
|
SU1602730A1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Электропривод | 1975 |
|
SU597051A1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКИ И ТЯГИ ЭКИПАЖА ТРАНСПОРТНОГО СРЕДСТВА | 1982 |
|
SU1145585A1 |
| Агрегат для добычи угля | 1977 |
|
SU714006A1 |
| УСТАНОВКА ДЛЯ ЛЕЧЕНИЯ ВИХРЕВЫМ МАГНИТНЫМ ПОЛЕМ | 2007 |
|
RU2353406C1 |
| ИНДУКТОР ЛИНЕЙНОГО ЭЛЕКТРОМАГНИТНОГО ТОРМОЗА | 1988 |
|
RU2124262C1 |
| Электропривод | 1986 |
|
SU1436214A1 |
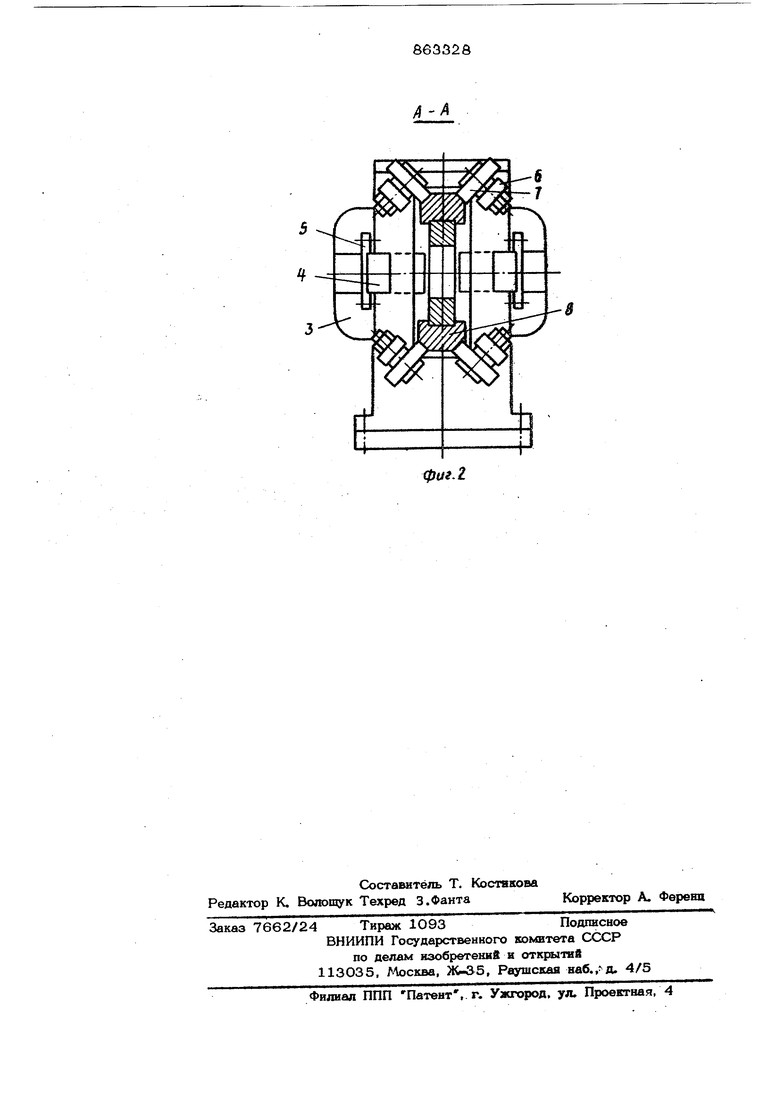
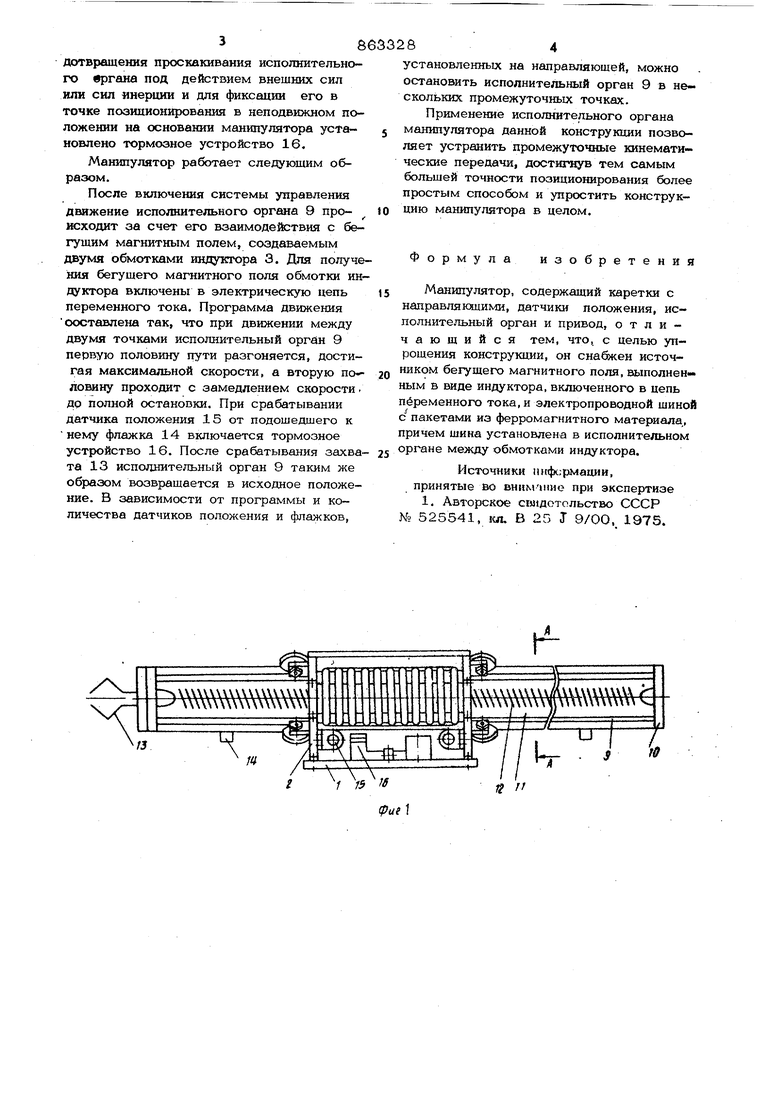
Изобретение относится к машиностроению и может быть использовано для автоматизации вспомогательных опер)аций при штамповке, механической обработке сварке и т.д. Известен манипулятор, содержащий каретки с направляющими, датчики положения, исполнительный орган и привод Llj Недостатком известного манипулятора является сложность конструкции, обусловленная наличием промежуточной кинемати ческой передачи. Цель изобретения - упрощение конструкции. Цель достигается тем, что манипулятор снабжен источником бегущего магнитного поля, выполненным в виде индуктора, включенного в цепь переменного то ка и электропроводной шиной с пакетами из ферромагнитного материала, причем ши на установлена в исполнительном органе между обмотками индуктора. На фиг. 1 изображена схема манипулятора; на фиг. 2 - разрез А-А на фиг. 1 анш1улятор состоит из основания 1, необходимого для монтажа частей манипулятора и для крепления к другим механизмам передвижения, смонтированных на нем двух стоек 2, между которыми расположены две катушки 3 индуктора с сердечниками 4, сердечники фиксируются в пазах стоек и прижимаются планками 5. На каждо{1 стойке установлены по четьфе кронштейна 6 с шарикоподшипниками 7, образуя две сяюрные каретки, по которым катаются направляющие планки 8 исполнительного органа 9. Между направляк щими планками, стянутыми фланцами 1О, расположена электропроводящая шина 11, в скошенные пазы которой запрессованы пакеты 12 из ферромагнитного материала. К одному из фланцев исполнительного органа крепится сменный захват 13. Для остановки исполнительного органа манипулятора с захватом в нужной точке на нижней направлякяцей устанавливаются передвижные флажки 14, а на стойке 2 .вцепятся датчики положения 15. Для предотвращения проскакивания исполнительного вргана под действием внешних сил или сил «нерции и для фиксации его в точке позиционирования в неподвижном положении иа основании манипулятора установлено тормозное устройство 16. Манипулятор работает следующим образом. После включения системы управления движение исполнительного органа 9 происходит за счет его взаимодействия с бе1ТЩИМ магнитным полем, создаваемым двумя обмотками индуктора 3. Для получе ния бегущего магнитного поля обмотки ин дуктора включены в электрическую цепь переменного тока. Программа движения составлена так, что при движении между двумя точками исполнительный орган 9 первую половину пути разгоняется, достигая максимальной скорости, а вторую по лошну проходит с замедлением скорости, до полной остановки. При срабатывании датчика положения 15 от подошедшего к нему флажка 14 включается тормозное устройство 16. После срабатывания захва та 13 исполнительный орган 9 таким же возвращается в исходное положение. В зависимости от программы и количества датчиков положения и флажков,
V;.
12 f установленнь1Х на направляющей, можно остановить исполнительный орган 9 в нескольких промежуточных точках. Применение исполнительного органа манипулятора данной конструкции позволяет устранить промежуточные кинематические передачи, достигнув тем самым большей точности позиционирования более простым способом и упростить конструкцию манипулятора в целом. Формула изобретения Манипулятор, содержащий каретки с налравлягацими, датчики положения, исполнительный орган и привод, отличающийся тем, что, с целью упрощения конструкции, он снабжен источНИКОМ бегущего магнитного поля, выполненым в виде индуктора, включенного в цепь еременного тока, и электропроводной шиной пакетами из ферромагнитного материала, ричем шина установлена в исполнительном л ...и „ « «niaj обмотками индуктора, Источники пифс:рмации, принятые во внимание при экспертизе 1. Авторское сгшдотольство СССР 525541, гш. В 25 J 9/00 1975
