Изобретение относится к области измерительной техники, а именно к области измерения параметров трения при механическом взаимодействии различных материалов и может быть использовано для исследования сил трения при воздействии тангенциальных усилий на присоски различных конфигураций и материалов при их фиксации на различных типах поверхностей, обладающих заданной шероховатостью.
Известно устройство (RU 41 866 U1) для имитации динамических нагрузок на испытательном стенде содержащее жестко закрепляемый на стенде, разделенный на две полости поршнем полый цилиндр, обе полости которого закрыты герметично, при этом одна из полостей закрыта вскрываемой крышкой, а к противоположной полости подключен источник газа высокого давления, а также устройство управления, отличающееся тем, что обе полости полого цилиндра снабжены средством наполнения водой, а внутренний диаметр цилиндра над поршнем со стороны вскрываемой крышки, включая выходной срез, равен диаметру поршня.
Данное устройство позволяет имитировать динамические нагрузки на объект, однако его конструкция и схема управления не предусматривает определение момента отрыва образца при превышении допустимой нагрузки и не предусматривает контроль над качеством переходных процессов в процессе испытаний, что учтено в предлагаемом экспериментальном стенде.
Известен также испытательный стенд (RU 74 470 U1) для создания регулируемых динамичных нагрузок, имеющий в своем составе гидроцилиндр нагружения, рабочие полости которого соединены с электрогидравлическим преобразователем, и датчик перемещения штока гидроцилиндра нагружения, отличающийся тем, что дополнительно снабжен датчиком нагрузки, который установлен в кинематической цепи с испытуемым объектом, снабжен программируемым устройством управления, который через цифроаналоговые преобразователи соединен с первым и вторым электронными регуляторами, выходы которых соединены с электрогидравлическим преобразователем, упомянутый датчик перемещения соединен с первым электронным регулятором и через аналого-цифровой преобразователь с программируемым устройством управления, а датчик нагрузки соединен со вторым электронным регулятором и через второй аналого-цифровой преобразователь с программируемым устройством управления.
Данный испытательный стенд может определить качество переходных процессов в процессе динамических воздействий на испытуемый образец благодаря интегрированным датчикам, однако не имеет технической возможности определять момент отрыва образца при сдвиге в различных средах, так как обладает только возможностью программного способа задания прилагаемых нагрузок без обратной связи.
Техническое решение направлено на реализацию возможности определения момента потери фиксации присоски и поверхности с заданными материалами и параметрами обработки.
Задачей заявленного изобретения является повышение точности измерения усилия сдвига за счет его контролируемого изменения во времени совместно с оценкой изменения уровня вакуума во времени датчиком давления, при проведении измерений в различных средах, в том числе и многофазных.
Поставленная задача достигается тем, экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах, содержащий жесткую раму, пневмоцилиндр, сменную упругую вакуумную присоску, сменную, скользящую по направляющим платформу, рейку, воздушный эжектор, штангу, магистрали, датчик для измерения перемещений в реальном времени, датчик вакуума, датчик давления в питающей магистрали, содержит датчик давления в вакуумируемой области, а сменная, скользящая по направляющим платформа, совершает прямолинейное движение.
Поставленная задача также достигается тем, что он содержит датчик давления в вакуумируемой области встроенный в сменную упругую вакуумную присоску.
Поставленная задача также достигается тем, что он содержит датчик давления в вакуумируемой области, встроенный в скользящую по направляющим платформу.
Поставленная задача также достигается тем, что сменная упругая вакуумная присоска может иметь различную форму и материал в зависимости от задач испытаний.
Поставленная задача также достигается тем, что сменная, скользящая по направляющим платформа обладает заданным качеством обработки поверхности.
В конструкцию стенда добавляется датчик давления, который показывает уровень давления в вакуумной камере присоски при ее фиксации на поверхности. Резкое изменение уровня давления в вакуумной камере будет свидетельствовать о разгерметизации системы «присоска-поверхность» и это будет означать, что приложенная к присоске относительно поверхности тангенциальная сила будет искомой критической силой, характеризующей систему «присоска-поверхность» с текущими заданными материалами и параметрами шероховатости обработки поверхности.
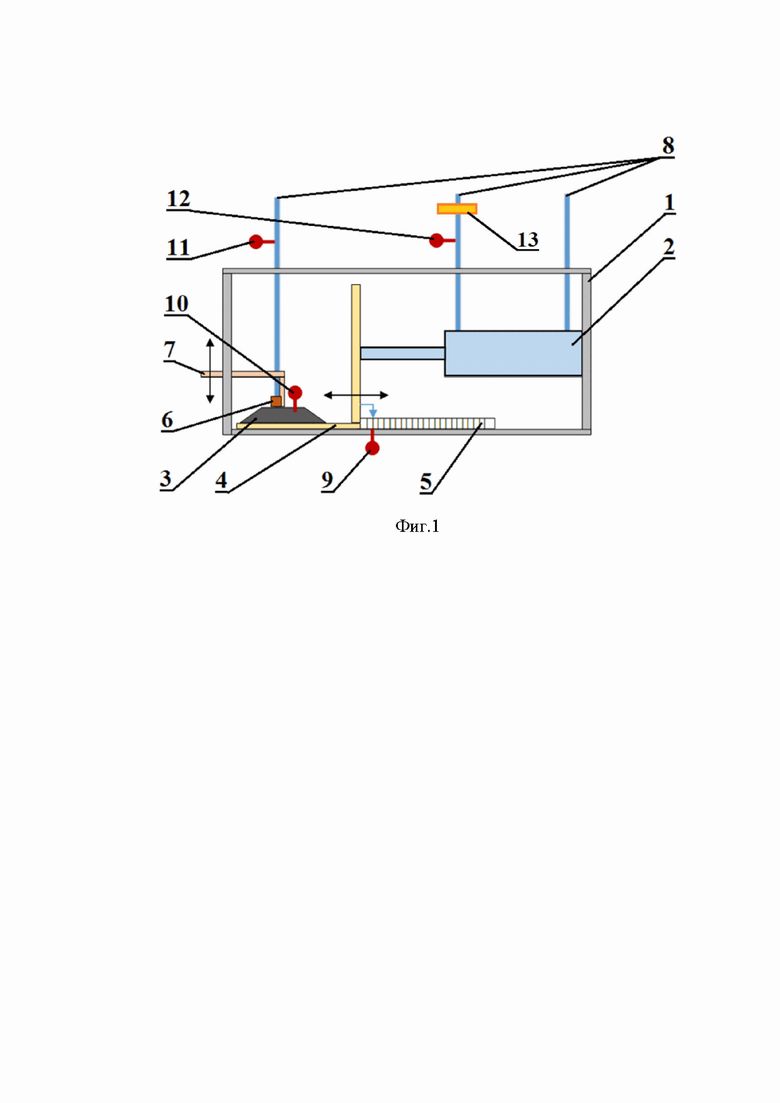
На фиг. 1. изображен экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах.
Экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах состоит из жесткой рамы 1, в основании которой установлены направляющие для сменной, скользящей по направляющим платформы 4.
Сменная, скользящая по направляющим платформа 4, обладающая заданным качеством обработки поверхности, приводится в движение пневмоцилиндром 2, формирующим усилие сдвига сменной упругой вакуумной присоски 3.
Сменная упругая вакуумная присоска 3 закреплена на штанге 7, имеющей по вертикали свободу хода, что позволяет сменной упругой присоске 3 свободно деформироваться при образовании вакуума в камере вакуумирования сменной упругой вакуумной присоски 3 и при этом не отклонять центральную ось сменной упругой вакуумной присоски 3 относительно вертикальной оси, что позволяет избежать паразитных моментов при проведении эксперимента.
Рейка 5, закрепленная на горизонтальной части жесткой рамы 1, используется для определения перемещения сменной, скользящей по направляющим платформы 4 и имеет датчик для измерения перемещений в реальном времени 9.
Для генерации вакуума в сменной упругой вакуумной присоске 3 используется воздушный эжектор 6, а уровень разрежения в камере вакуумирования сменной упругой вакуумной присоски 3 контролируется датчиком вакуума 10.
Воздушный эжектор 6 питается сжатым воздухом из магистрали 8 (слева на фиг. 1) и имеет выход в окружающую среду.
Давление питания воздушного эжектора 6 измеряется датчиком давления 11.
Магистрали 8 (справа на фиг. 1) подключены к пневмоцилиндру 2, и на магистрали, питающей штоковую полость на втягивание пневмоцилиндра 2, установлен редуктор давления 13 с возможностью задачи уровня давления, что позволяет реализовать переменное сдвигающее усилие на сменной упругой вакуумной присоске 3.
Давление в штоковой полости пневмоцилиндра 2 измеряется датчиком давления 12.
Перед проведением испытаний в экспериментальном стенде для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах в жесткой раме 1 устанавливается сменная, скользящая по направляющим платформа 4, обладающая заданным качеством обработки (шероховатость поверхности, твердость материала, неровность поверхности и прочие параметры платформы определяются из методики испытаний). На сменную, скользящую по направляющим платформу 4, обладающую заданным качеством обработки, устанавливается сменная упругая вакуумная присоска 3, которая через штангу 7 со свободным ходом закрепляется на жесткой раме 1. Сменная упругая вакуумная присоска 3 обладает заданным конструктивом (например гофрированный профиль, округлая или полигональная форма и пр.) и материалом (бутадиен-нитрильный каучук, силикон и пр.), определяемыми из методики испытаний. Свободный ход штанги 7 обеспечивает возможность прижатия сменной упругой вакуумной присоски 3 к сменной, скользящей по направляющим платформе 4, обладающей заданным качеством обработки. В начале эксперимента в вакуумной полости сменной упругой вакуумной присоски 3 образуется вакуум благодаря воздушному эжектору 6, питаемому через воздушную магистраль 8. Давление питания эжектора 6 контролируется датчиком давления 11. Происходит фиксация сменной упругой вакуумной присоски 3 на поверхности сменной, скользящей по направляющим платформе 4, обладающей заданным качеством обработки. Факт наличия необходимого уровня вакуума в вакуумной полости сменной упругой вакуумной присоски 3 фиксируется посредством датчика давления 10. После образования необходимого уровня вакуума в сменной упругой вакуумной присоске 3 поступает команда на втягивание штока пневмоцилиндра 2, закрепленного жестко на жесткой раме 1 и тянущего сменную, скользящую по направляющим платформу 4, обладающую заданным качеством обработки. Для этого в штоковую полость пневмоцилиндра 2 подается рабочее тело под необходимым давлением. Уровень этого давления регулируется редуктором давления 13 и контролируется датчиком давления 12. В зависимости от уровня давления питания в полости пневмоцилиндра 2 на втягивание штока можно регулировать силу, прикладываемую к сменной, скользящей по направляющим платформе 4, обладающей заданным качеством обработки. При превышении определяемой параметрами исследуемых материалов и уровнем вакуума силы происходит смещение сменной, скользящей по направляющим платформы 4, обладающей заданным качеством обработки, относительно сменной упругой вакуумной присоски 3, что приводит к разгерметизации системы и изменению уровня вакуума в полости сменной упругой вакуумной присоски 3, что регистрируется датчиком давления 10. Величину перемещения можно зафиксировать с помощью датчика для измерения перемещений в реальном времени 9 и оценить визуально по рейке 5. При этом выбор элементов пневмоавтоматики обусловлен возможностью проведения экспериментальных исследований как в воздушной, так и в жидкой среде, а также в многофазной среде, так как система позволяет учитывать внешнее давление на исследуемые образцы.
Таким образом, полученные данные об изменении статического и динамического давления в вакуумной полости сменной упругой вакуумной присоски 3 позволяют провести оценку качества переходных характеристик давления, а данные о перемещении позволяют оценить качество сцепления сменной упругой вакуумной присоски 3 и сменной, скользящей по направляющим платформе 4, обладающей заданным качеством обработки.
Список использованной литературы.
1. Патент RU 41866 U1. Устройство для имитации динамических нагрузок на испытательном стенде. Опуб. 10.11.2004.
2. Патент RU 74470 U1. Испытательный стенд для создания регулируемых динамичных нагрузок. Опуб. 27.06.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на кручение в различных средах | 2024 |
|
RU2841057C1 |
| Установка для упаковки продуктов в картонные коробки | 2020 |
|
RU2730764C1 |
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| Устройство для закрепления тонкостенной нежесткой детали при обработке | 2015 |
|
RU2620524C2 |
| Устройство для сортировки и укладки в стопу полосового материала | 1983 |
|
SU1199370A1 |
| Захватное устройство | 1988 |
|
SU1549893A1 |
| Устройство для закрепления тонкостенной нежесткой детали при обработке | 2015 |
|
RU2620523C2 |
| ПНЕВМОВИБРАЦИОННОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ФИЛЬТРОВАНИЯ И ПЕРЕКАЧКИ РАЗЛИЧНЫХ ЖИДКОСТЕЙ | 1996 |
|
RU2091128C1 |
| Система управления вакуумного захватного устройства | 1982 |
|
SU1122599A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
Изобретение относится к области измерительной техники, а именно к области измерения параметров трения при механическом взаимодействии различных материалов, и может быть использовано для исследования сил трения при воздействии тангенциальных усилий на присоски различных конфигураций и материалов при их фиксации на различных типах поверхностей, обладающих заданной шероховатостью. Экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах содержит жесткую раму, в основании которой установлены направляющие для сменной скользящей по направляющим платформы, совершающей прямолинейное движение, закрепленную на горизонтальной части жесткой рамы рейку, снабженную датчиком для измерения перемещений упомянутой платформы в реальном времени, сменную упругую вакуумную присоску с датчиком вакуума, закрепленную на имеющей по вертикали свободу хода штанге, пневмоцилиндр, выполненный с возможностью приведения в движение платформы и формирующий усилие сдвига сменной упругой вакуумной присоски, стенд также содержит воздушный эжектор, выполненный с возможностью питания воздухом из магистрали и имеющий выход в окружающую среду, датчик давления в питающей магистрали и датчик давления в вакуумируемой области. Технический результат - повышение точности измерения усилия сдвига за счет его контролируемого изменения во времени совместно с оценкой изменения уровня вакуума во времени датчиком давления, при проведении измерений в различных средах, в том числе и многофазных. 2 з.п. ф-лы, 1 ил.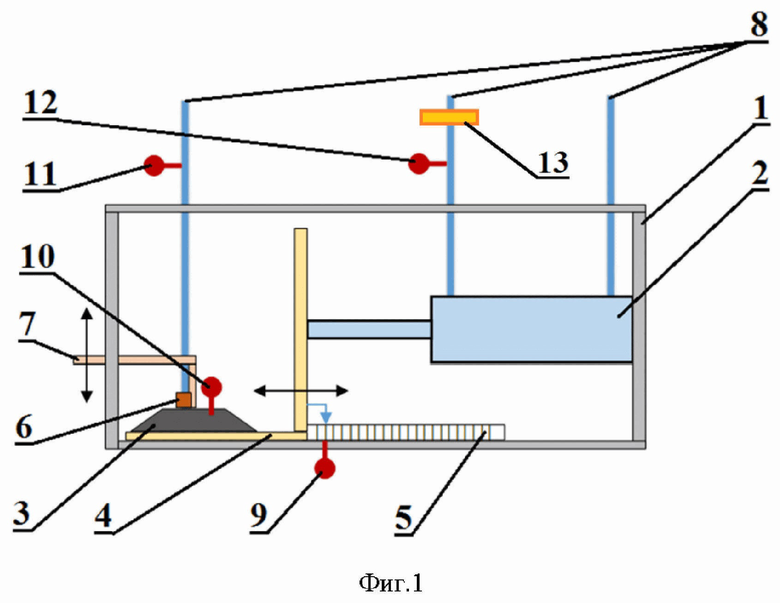
1. Экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах, содержащий жесткую раму, в основании которой установлены направляющие для сменной скользящей по направляющим платформы, совершающей прямолинейное движение, закрепленную на горизонтальной части жесткой рамы рейку, снабженную датчиком для измерения перемещений упомянутой платформы в реальном времени, сменную упругую вакуумную присоску с датчиком вакуума, закрепленную на имеющей по вертикали свободу хода штанге, пневмоцилиндр, выполненный с возможностью приведения в движение платформы и формирующий усилие сдвига сменной упругой вакуумной присоски, стенд также содержит воздушный эжектор, выполненный с возможность питания воздухом из магистрали и имеющий выход в окружающую среду, датчик давления в питающей магистрали и датчик давления в вакуумируемой области.
2. Экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах по п.1, отличающийся тем, что датчик давления в вакуумируемой области встроен в сменную упругую вакуумную присоску.
3. Экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах по п.1, отличающийся тем, что датчик давления в вакуумируемой области встроен в скользящую по направляющим платформу.
| Автомат переключения скоростей нагнетателя авиационного двигателя | 1945 |
|
SU74470A1 |
| US 20050109117 A1, 26.05.2005 | |||
| Способ контроля качества приклейки теплозащитных элементов и устройство для его осуществления | 1983 |
|
SU1778634A1 |
| Судно ледокольного типа | 1934 |
|
SU41866A1 |
| CN 102759489 B, 26.12.2017. | |||

