Изобретение относится к подъемно- транспортному оборудованию, а именно - к захватным устройствам для изделий с вертикальным отверстием и может быть использовано для загрузки термических печей.
Известны захватные устройства для грузов с отверстиями, содержащие цилиндрический стержень с серьгой для навески на крюк крана и охватывающую его горизонтальную цилиндрическую втулку с отверстиями, в которых перемещаются подпружиненные клинья, установленные в стержне.
Известно также захватное устройство, содержащее клин с серьгой для навески на крюк и охватывающую клин разрезную цанговую втулку.
Однако, известные устройства не обеспечивают автоматической отстроповки и за- строповки груза.
Наиболее близким по технической сущности и достигаемому эффекту является захватное устройство для изделий с отверстием, содержащее навешиваемый на крюк грузоподъемного механизма корпус, захватный дебалансный орган, шарнирно закрепленный на свободном конце корпуса, управляющее средство, включающее подвижную вдоль корпуса втулку для взаимодействия с захватным органом, палец, жестко закрепленный на корпусе, и паз V- образной формы, выполненный во втулке для перемещения пальца, причем захватный дебалансный орган выполнен в виде цилиндра со срезами по диаметру обращенной к корпусу части от торцов до шарнира.
Недостатком известного захватного устройства является его невысокая надежность и невозможность автоматизации циклов захвата и освобождения груза.
Цель изобретения - повышение надежности и расширение эксплуатационных возможностей путем обеспечения автоматизации циклов захвата и освобождения груза.
На фиг,1 изображено захватное устройство, общий вид; на фиг.2 - то же, вид сбоку.
Захватное устройство содержит навешиваемый на крюк подъемной машины полый корпус 1, с возможностью поворота относительно последнего дебалансный орган 2, соединенный с нижним концом корпуса 1 посредством горизонтальной оси 3, крюк 4, размещенный в полости корпуса 1 с возможностью вертикального перемещения относительно последнего и выполненный из трех шарнирно соединенных между собой последовательно частей 5,6 и7, с возможностью одностороннего поворота последних относительно друг друга в вертикальной плоскости и взаимодействия нижней части 7 с концом дебаланского органа 2. Верхняя часть 5 крюка А выполнена
с продольным пазом 8, в котором распо-. ложен горизонтальный палец 9, и с выступом, гибкую тягу 10, пропущенную через трубку 11, причем один конец тяги 10 соединен с дебалансным органом 2, а вто0 рой -с втулкой 12, охватывающей корпус 1, и подвижную относительного него в продольном направлении для взаимодействия с верхним торцом которой и служит выступ части 5 крюка 4, размещенную на корпусе 1
5 с возможностью продольного перемещения и взаимодействия своим верхним торцом с наружным торцом втулки 12 центрирующую рамку 13с выступами 14 на боковых гранях для взаимодействия с верхней кромкой от0 верстия груза. Дебалансный орган 2 выполнен с выступом 15 для взаимодействия с корпусом 1 и с наклонным пазом 16, расположенным под углом 45° к верхней плоскости дебалансного органа 2, в котором
5 расположена горизонтальная ось 3. Центр тяжести дебалансного органа 2 размещен на перпендикуляре к середине осевой линии наклонного паза 16у верхней плоскости дебалансного органа 2. На корпусе 1 в вер0 хней части выполнен упор 17 для разгрузки гибкой тяги 10 от веса устройства. Втулка 12 на внутренней стороне грани, ближайшей к трубке 11, имеет прилив с проушиной, через которую продета гибкая тяга 10. Проушина
5 расположена с отверстием трубки 11. Движение втулки 12 вниз ограничено верхним торцом трубки 11, в которой упирается прилив втулки 12. Конец гибкой тяги 10, пройдя проушину прилива втулки 12, оканчивается
0 утолщением, которое больше проушины втулки 12,
Захватное устройство навешивают на крюк подъемной машины, опускают его в отверстие изделия, подлежащего подъему и
5 транспортировке, до упора центрирующей рамки 13 во втулку 12 и поднятия их вместе до упора 17..При этом втулка 12 своим приливом с проушиной тянет за утолщение гибкую тягу 10, которая поворачивает
0 дебалансиый орган 2 из вертикального положения против часовой стрелки. После перемещения центра тяжести дебалансного органа 2 через вертикаль, проходящую через ось 3, орган 2 и самостоятельно прово5 рач ивается, и также продолжает тянуться гибкой тягой 10 до упора своим выступом 15 в корпусе 1, а втулка 12 останавливается упором 17. Проворачиваясь, орган 2 своим концом, который на фиг.1 изображен вверху, отклоняет влево часть 7 крюка 4, а части
5 и б при этом остаются в вертикальном положении. Проворачиваясь далее, орган 2 выходит из взаимодействия с частью 7, которая затем возвращается в вертикальное положение.
После соприкосновения втулки 12 с упором 17 начинают подъем устройства. Втулка 12 при этом возвращается в первоначальное-положение, а центрирующая рамка 13 находится своими выступами 14 на верхней кромке отверстия груза, центрируя захват по середине отверстия. Дебалансный орган 2, упираясь своим концом, который на фиг.1 изображен внизу, в нижнюю плоскость груза, поворачивается на оси 3 по часовой стрелке, перемещаясь пб этой оси наклонным пазом 16 до принятия горизонтального положения. Центр тяжести органа 2 при этом находится справа от оси 3. Захват груза произведен.
Для отстроповки груза захватное устройство опускают. При этом дебалансный орган 2 под действием центра тяжести возвращается в исходное вертикальное положение, протягивая гибкую тягу 10 в первоначальное положение. При повороте орган 2 взаимодействует с противоположной стороной части 7 крюка 4. Крюк 4 поворачивается на горизонтальном пальце 9, выходя выступом части 5 за пределы корпу- са 1. Рамка 13 поднимается до упора своим верхним торцом в наружный торец втулки 12, вместе с которой поднимается до упора верхним торцом втулки 12 в выступ части 5, поднимая крюк 4 до упора пальца 9 в ниж- нюю часть продольного паза 8. Этим блокируется перемещение втулкой 12 гибкой тяги 10 и разворот дебалансного органа 2. При подъеме крюка 4 часть 7 выходит из взаимодействия с органом 2 и части 6 и 7 занимают вертикальное положение. Далее захватное устройство поднимают из отверстия груза. Втулка 12 вместе с рамкой 13 и крюком 4 опускаются в исходное положение, при этом часть 5 располагается вертикально. Далее цикл повторяется.
Предложенное захватное устройство повысит надежность при перемещении грузов с вертикальным отверстием, обеспечивая автоматизацию циклов захвата и освобождения груза.
Формула изобретения Захватное устройство для изделий с вертикальным отверстием, содержащее навешиваемый на крюк подъемной машины полый корпус, соединенный с нижним концом корпуса посредством горизонтальной оси с возможностью поворота относительно последнего дебалансный орган и охватывающую корпус, подвижную относительно него в продольном направлении втулку, о т- личающееся тем, что, с целью повышения надежности и расширения эксплуатационных возможностей путем обеспечения автоматизации циклов захвата и освобождения груза, дебалансный орган выполнен с наклонным пазом, в котором расположена горизонтальная ось и с выступом для взаимодействия с корпусом, а устройство снабжено гибкой тягой, один конец которой соединен с дебалансным органом, а другой конец - со втулкой, размещенным в полости корпуса, соединенным с ним посредством горизонтального пальца с возможностью вертикального перемещения относительно корпуса, выполненным из трех шарнирно соединенных между собой последовательно частей с возможностью одностороннего поворота последних относительно одна другой в вертикальной плоскости и взаимодействия нижней части с концом дебалансного органа крюком, верхняя часть которого выполнена с продольным пазом, в котором расположен горизонтальный палец, и с выступом для взаимодействия с верхним торцом втулки, и охватывающей корпус, размещенный на последнем с возможностью продольного перемещения и взаимодействия своим верхним торцом с наружным торцом втулки центрирующей рамкой с выступами на боковых гранях для взаимодействия с верхней кромкой отверстия груза,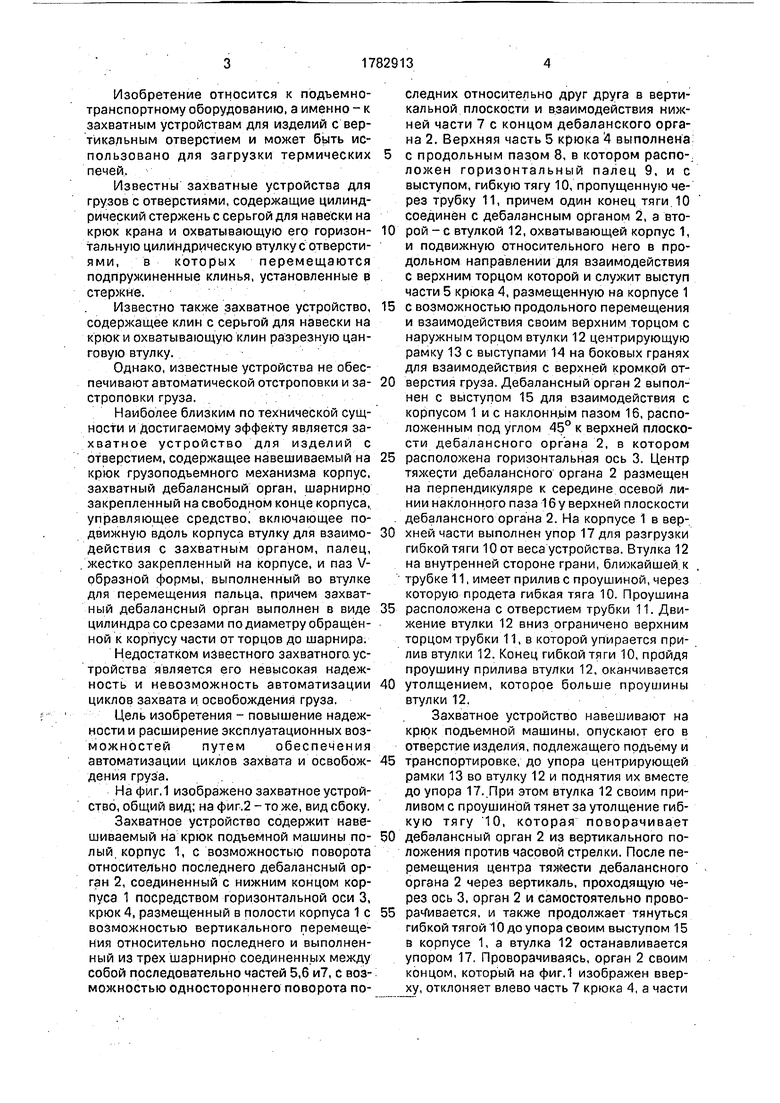
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для изделий с отверстием | 1983 |
|
SU1152918A1 |
| Захват для грузов с отбортовкой | 1990 |
|
SU1766820A1 |
| Захватное устройство для груза с проушиной | 1989 |
|
SU1735194A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ИЗДЕЛИЯ С ОТВЕРСТИЕМ | 1992 |
|
RU2045459C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1973 |
|
SU368172A1 |
| Грузозахватное устройство | 1987 |
|
SU1618722A1 |
| Грузозахватное устройство | 1982 |
|
SU1049410A1 |
| Грузозахватное устройство | 1982 |
|
SU1052469A1 |
| Захватное устройство для изделий с горизонтальным отверстием | 1981 |
|
SU998299A1 |
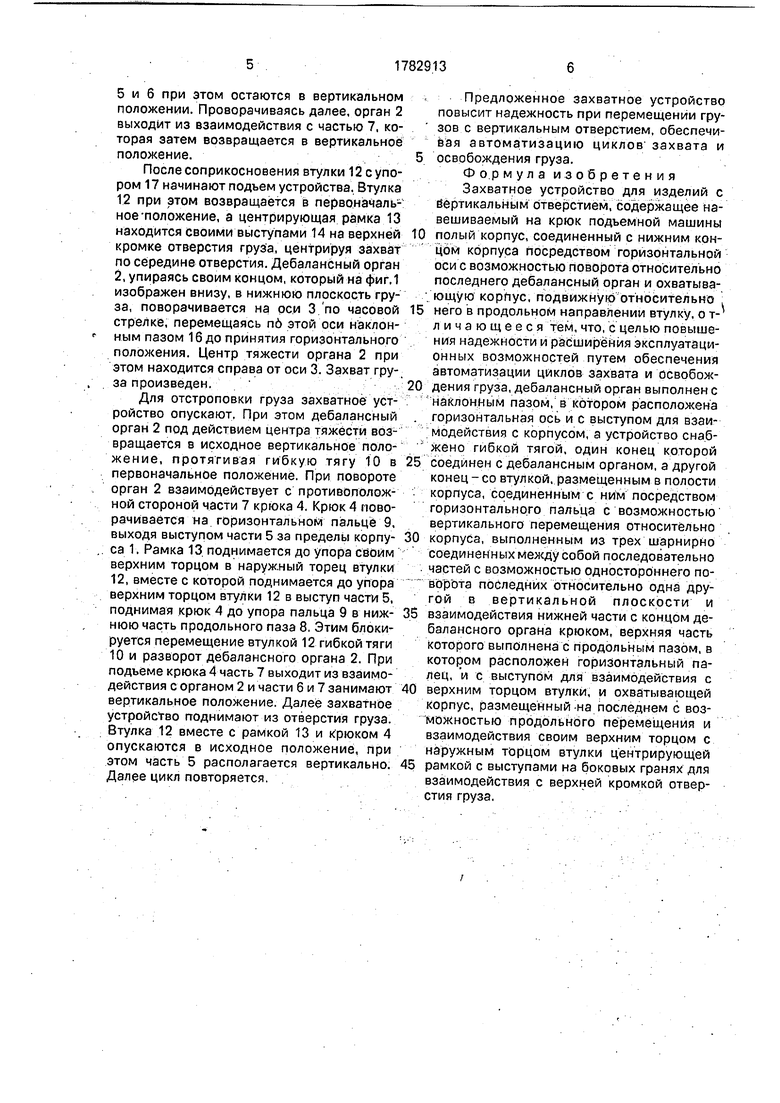
Использование: относится к подъемно- транспортной технике и касается захватных устройств для грузов с вертикальным отверстием. Сущность изобретения: устройство содержит корпус 1, дебалансный орган 2, крюк 4 из трех частей 5,6,7, тягу 10, втулку, рамку 13 с выступами 14. При использовании устройство опускают в отверстие изделия до упора рамки 13 в втулку 12, Втулка 12 перемещается вверх вместе с тягой 10. Дебалансный орган 2 поворачивается и отклоняет часть 7 крюка 4. Дебалансный орган 2 выходит из взаимодействия с частью 7. При последующем подъеме орган 2 занимает горизонтальное положение и подхватывает груз. При опускании устройства дебалансный орган 2 занимает вертикальное положение. Устройство извлекается из отверстия, 2 ил. 17. сл с XI со N5 Ю .«Ј СА
Фиг. 2
| Захватное устройство для изделий с отверстием | 1983 |
|
SU1152918A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
