1
(21)4777552/11 (22)03.01.90 (46)07.10.92. Бюл. №37
(71)Кемеровский технологический институт пищевой промышленности
(72)А.Н.Пирогов
(56)Авторское свидетельство СССР № 1127837, кл. В 66 С 1/28, 1983.
(54) ЗАХВАТ ДЛЯ ГРУЗОВ С ОТБОРТОВ- КОЙ
(57)Использование: изобретение относится к захватным устройствам и может быть использовано при транспортировке групп штучных грузов, снабженных по верхнему периметру отбортовкой, например деревянные обрешетки с бутылями. Сущность изобретения: захват содержит сварную раму, накладываемую на грузы, на которой установлены шарнирно подпружиненные на открытие крюки с управляющими рычагами, Управление крюками осуществляется подвижной рамой с проушинами для навешивания на грузоподъемный механизм, перемещающейся на четырех стойках, приваренных к сварной раме и снабженных на концах втулками, в которых установлены два валика с закрепленными дебалансными стопорными пластинами. При опускании захвата за проушины сварная рама центрируется на грузах, а крюки находятся в подпружиненном открытом состоянии. При дальнейшем его опускании подвижная рама, скользя по стойкам, рычагами повернет крюки, которые захватит грузы за их отбор- товки. В этот момент дебалансные пластины повернутся под собственным весом на 90° и зафиксируют подвижную раму в нижнем положении. Для снятия захвата поворачивают дебалансные стопорные пластины в исходное положение на 90°, поднимают за проушины подвижную раму вверх. При этом рычаги крюков освободятся и пружины повернут последние в исходное положение, т.е. выйдут из зацепления с отбортовками грузов 2. 3 ил.
(Л
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Захватное устройство для изделий с отверстием | 1983 |
|
SU1152918A1 |
| Захватное устройство для грузов с отбортовкой | 1983 |
|
SU1085925A1 |
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| Грузозахватная система | 1985 |
|
SU1414753A1 |
| Захватное устройство для груза с проушиной | 1989 |
|
SU1735194A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ИЗДЕЛИЯ С ОТВЕРСТИЕМ | 1992 |
|
RU2045459C1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Захват-кантователь | 1983 |
|
SU1137056A1 |
Изобретение относится к захватным устройствам и может быть использовано при транспортировке и штабелировании штучных грузов, снабженных по верхнему периметру отбортовкой, например, стеклянных бутылей с химреактивами. упакованных в деревянные обрешетки, и других аналогичных грузов.
Известен захват для группы банок с напитками, содержащий горизонтальную раму, на которой размещены четыре шарнира, на каждом из которых подвешены зажимные губки, снабженные общим гидропроводом, состоящие из двух половин, соединенных под прямым углом так, что все зажимные губки образуют составной прямоугольник, внутри которого и фиксируется группа банок при подаче давления в гидроцилиндр.
Этот захват фиксирует группу грузов (банок) с внешней стороны и удерживает их посредством сил трения, что не может быть надежным и безопасным способом транспортирования. Применение этого захвата не позволит плотно друг к другу штабелировать группы грузов, т.к. необходимо иметь зазоры для вывода зажимных губок, а это нецелесообразно с точки зрения максимального использования складских площадей.
Известно также захватное устройство для грузов с отбортовкой, содержащее верх|
СЬ
о
00
8
хнюю раму, кинематически связанную с ней нижнюю раму, на которой шарнирно закреплены двуплечие захватные крюки, снабженные средством для возврата их в раскрытое положение и установленные с возможностью взаимодействия верхними своими плечами с верхней рамой. Кинематическая связь между рамами включает в себя жестко закрепленные на верхней раме вертикадьные танги, пропущенные через отверстия, выпо лденныр ТЙйжней раме, и имеющие н Ъи кШхНонца упоры, и за- крепле нЪ ё на н Йжней Зам е|и проходящие через отверстия , выполненйые в верхней раме, тяТи, прикрепленные к элементу навески на грузоподъемный механизм, при этом рамы подпружинены между собой.
Недостатком известного устройства является то, что усилие запирания крюков обеспечивается воздействием на плечи рычагов лишь силы тяжести верхней рамы, к тому же частично компенсируемым противодействием пружин. Это снижает надежность устройства.
Целью изобретения является повышение надежности работы захватного устройства.
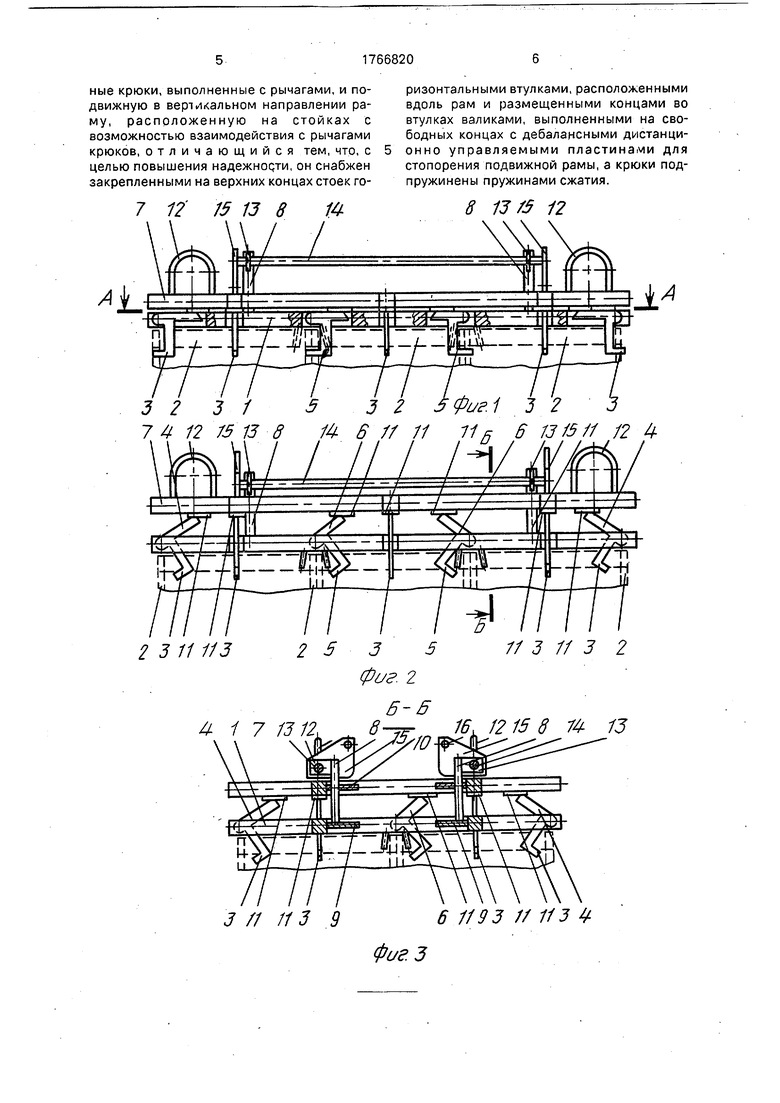
Указанная цель достигается тем, что известное захватное устройство, навешиваемое на грузоподъемный механизм, имеющее раму, закрепленные на раме стойки шарнирно закрепленные на раме захватные крюки, выполненные с рычагами, подвижную в вертикальном направлении раму, расположенную на стойках с возможностью взаимодействия с рычагами крюков, имеет на концах стоек горизонтальные втулки, в которых размещены концы двух валиков, с выполненными на концах дебалансными дистанционно управляемыми пластинами для стопорения подвижной .рамы, а сами крюки выполнены подпружиненными на открытие,
На фиг.1 показан общий вид группового захвата в транспортном состоянии; на фиг.2 - общий вид захвата в момент наложения на грузы (или снятия с грузов); на фиг.3-5 - разрезы.
Устройство содержит трубчатую сварную раму 1, накладываемую на грузы 2 с отбортовкой, в пазах 3 (фиг.5) которой шарнирно установлены крюки 4, подпружиненные на открытие (пружины условно не показаны), снабженные перпендикулярно к ним прикрепленными управляющими рычагами 5. Над рамой 1 с зазором, позволяющим крюкам 4 г. рычагами 5 повернуться и полностью освободить отбортовки грузов 2, установлена повторяющая форму рамы подвижная рама 6, имеющая возможность перемещаться в перпендикулярном направлении от плоскости рамы 1 на четырех стойках 7, приваренных к пластинам 8 рамы 1 и свободно проходящих через отверстия в
5 пластинах 9, приваренных к раме 6. Снизу к раме 6 в местах контакта ее с управляющими рычагами 5 крюков 4 закреплены антифрикционные накладки 10. Для навески захвата на грузоподъемный механизм свер0 ху к раме 6 приварены проушины 11.
К верхним концам стоек 7 приварены втулки 12, в которых установлены два одинаковых валика 13, к концам которыхжестко закреплены (приварены) четыре дебаланс5 ные стопорные пластины 14, центры тяжести которых смещены по отношению к точке их крепления к валикам. Стопорные пластины 14 при помощи тяг 15 соединены с испол- нительным механизмом (условно не
0 показан).
Групповой захват работает следующим образом. За проушины 11 захват навешивают на грузоподъемный механизм и опускают на группу грузов 2 (в данном случае 6
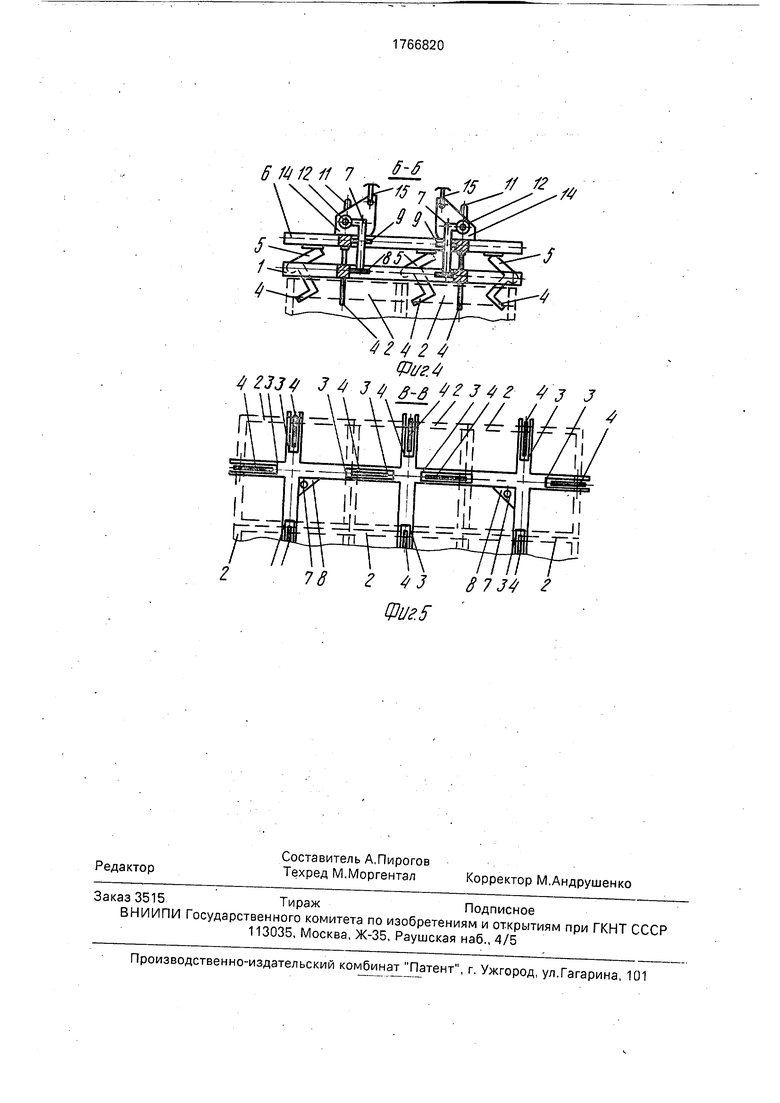
5 грузов). При опускании вниз рама 6 через накладки 10 повернет за рычаги 5 крюки 4 и последние захватят все грузы за отбортовки. В этот момент дебалансные стопорные пластины 14 под собственным весом повер0 нутся на 90° из положения, показанного на фиг.4, в положение, показанное на фиг.З, и заблокируют нажимную раму 6 в нижнем положении, а последняя рычагами 5 зафиксирует крюки 4.
5 Освобождение захвата от грузов производят в следующей последовательности. Опускают грузы вниз на площадку склади, рования до тех пор, пока рама 6 не будет полностью прилегать к раме 1 (при этом
0 между проушинами 11 и, например, вилами погрузчика появится зазор). Исполнительным механизмом (на чертежах условно не показан) за тяги 15 дебалансные стопорные пластины 14 из положения, показанного на
5 фиг.З, переводят в положение, показанное на фиг.4. При этом рама 6 разблокируется. За проушины 11 поднимают раму 6 вверх, которая, скользя при этом своими пластинами с отверстиями 8 по стойкам 7 вверх,
0 упрется в дебалансные стопорные пластины 14, при этом рычаги 5 освободятся и крюки 4 повернутся под действием пружин и освободят грузы. При дальнейшем подъеме захват будет с грузов снят.
5
Формула изобретения Захват для грузов с отбортовкой, содержащий навешиваемую на грузоподъемный механизм раму, закрепленные на раме стойки,шарнирно закрепленные на раме захватные крюки, выполненные с рычагами, и подвижную в вертикальном направлении раму, расположенную на стойках с возможностью взаимодействия с рычагами крюков, отличающийся тем, что, с целью повышения надежнорти, он снабжен закрепленными на верхних концах стоек го7 12 15 13 8
т / / / ггт-п
323/ 5 32 3 2
74 12 75 13 8 14-6 // 11 11 z 6 13 tftf 12 4
V
-j- - /Иг 7/
ill // /|/// тГ / IIII/
2 3 11 113
// J // 3 2
253 5 фиг 2
6-6 4- 1 7 1312 , - #L /- 15 8 П 13
s/Jsf
J // // 3 9
ризонтальными втулками, расположенными вдоль рам и размещенными концами во втулках валиками, выполненными на свободных концах с дебалансными дистанци- онно управляемыми пластинами для стопорения подвижной рамы, а крюки подпружинены пружинами сжатия.
8 13 Я 12
// J // 3 2
6 1193 1/113 4
фие.3
6 tt 12 Я 7
f -P---р ррг1 1 т t
V77T
4242 4 fit/г. 4 42334 34 31/ 0-0 42342 4 j
tI IIt .l ....у1
х/л//.//
.15 J V.
/4
IX у
