Изобретение относится к области машиностроения и в частности к шарнирно- рычажным направляющим механизмам и может найти применение в механизмах автоматических устройств и приборов.
Известен механизм направляющего шарнирного четырехзвенника, у которого точка шатунной плоскости может приближенно описывать заданную траекторию. Недостатком этого механизма является невысокая точность приближения получаемой траектории к заданной, так как число интерполяционных точек, получаемой и заданной траекторий ограничено некоторым числом п, гарантированное число п для четырехзвенника равно 5. Увеличение количества интерполяционных точек ведет к повышению точности отработки заданной траектории.
Известен механизм с переменной длиной звена, принятый авторами за прототип, состоящий из стойки, ведущего кривошипа, шатуна, коромысла, состоящего из двух шарнирно соединенных между собой частей, первая из которых шарнирно соединена со стойкой, вторая часть шарнирно соединена с шатуном, двух подпружиненных один к другому ограничителей, установленных на соответствующих сопряженных частях коромысла и предназначенных для ограничения их взаимного вращения, и упора, размещенного на стойке и предназначенного для фиксации первой части коромысла Механизм представляет из себя замкнутый шарнирный пятизвенник. Данный механизм может быть использован как направляющий. На его шатунной плоскости можно найти точку, имеющую траекторию приближенную к заданной. Точность приближения может характеризоваться количеством интерполяционных точек, которое здесь равно п +2. Механизм может работать в режиме шарнирного четырехзвенника в первом случае с одной длиной стойки и коромысла, во втором случае с другими длинами стойки и коромысла. Производя синтез одного четырехзвенника по п интерполяционным точкам, а другого по 3-м интерполяционным точкам и совмещая крайние интерполяционные точки получаем п + 2 интерполяционных точек в итоге. Недостатком этого механизма является недостаточная невысокая точность отработки траектории шатунной точкой, ввиду небольшого количества интерполяционных точек.
Цель изобретения - повышение точности механизма путем увеличения количества интерполяционных точек получаемой и заданной траекторий движения шатунной точки
Цель достигается тем, что в шарнирно- рычажном направляющем механизме с переменной длиной звена, содержащем стойку, ведущий кривошип, шатун, коромысло, состоящее из двух шарнирно соединенных между собой частей, первая из которых шарнирно соединена со стойкой, два подпружиненных один к другому ограничителя, установленные на соответствую0 щих сопряженных частях коромысла и предназначенные для ограничения их взаимного вращения, и упор, размещенный на стойке и предназначенный для фиксации первой части коромысла, он снабжен допол5 нительным коромыслом, одним концом шарнирно присоединенном к концу шатуна, а другим концом шарнирно прикрепленном к свободному концу второй части коромысла, дополнительной парой ограничителей,
0 установленных на соответствующих сопряженных концах дополнительного звена и второй части коромысла и предназначенных для ограничения их взаимного вращения, второй пружиной, один конец которой за-.
5 креплен на стойке и вторым упором, установленным также на стойке, а свободный конец второй пружины предназначен для поджатия второй части коромысла ко второму упору.
0 Предлагаемый механизм может работать в трех режимах. До контакта звеньев составного коромысла с неподвижными упорами как шарнирный четырехзвенник с длиной коромысла равной расстоянию меж5 ду концом составного коромысла, соединенного со стойкой и концом дополнительного звена, соединенного с шатуном при замкнутых парах ограничителей на соответствующих сопряженных концах составного
0 коромысла и концах дополнительного звена и второй части составного коромысла. При контакте звеньев составного коромысла с неподвижными упорами механизм работает как шарнирный четырехзвенник, но уже с
5 другими длинами коромысла и стойки.
Возможность работы механизма в трех режимах позволяет при синтезе этого механизма определить параметры основного четырехзвенника, шатунная точка которого
0 имеет п интерполяционных точек с заданной траекторией, а для двух других четырех- звенников определить по 3 интерполяционные точки. Выбор 3-х точек обусловлен тем. что через 3 точки всегда
5 можно провести окружность, то есть всегда можно найти точку вращения коромысла четырехзвенника, имеющего эти три интерпо- ляционные точки. Синтез механизма проводится в следующей последовательности:
1.Определяются параметры основного четырехзвенника, имеющего п интерполяционных точек с заданной траекторией.
2.Полученный четырехзвенник ставим в положение, определяемое первым интерполяционным положением и поворачиваем кривошип в сторону обратную его рабочему вращению на два произвольных угла, так чтобы чертящая шатунная точка находилась на заданной траектории. Конец шатуна, соединенный с коромыслом, при этом освобождаем, и он занимает два положения. Через эти два положения и положение конца шатуна, определяемое первым интерполяционным положением основного четырехзвенника, проводим окружность и определяем ее центр. Обозначим положение этого центра точкой F.
3.Аналогично, ставим основной четырехзвенник в n-е интерполяционное положение и поворачиваем кривошип в сторону его рабочего вращения на два произвольных угла, так чтобы чертящая шатунная точка находилась на заданной траектории, определяем центр окружности, проходящей через три положения конца шатуна. Обозначим этот центр точкой Е
Положение точек F и Е будет определять положение шарниров соединяющих звенья составного коромысла и дополнительного звена.
Сопоставительный анализ с прототипом показывает, что заявляемый шарнирно- рычажный направляющий механизм с переменной длиной звена отличается наличием дополнительного звена, шарнирно установленного между шатуном и второй частью составного коромысла, дополнительной пары ограничителей на сопряженных концах дополнительного звена и второй части составного коромысла, второго неподвижного упора и пружины
На чертеже показана кинематическая схема механизма. Основными линиями показано положение механизма перед началом отработки заданной траектории, штрих-пунктирами промежуточные положения.
Механизм состоит из следующих частей: ведущего кривошипа 1, (см. черт.) шатуна 2, дополнительного коромысла 3, звена 4 и звена 5, стойки 6, которые составляют замкнутый шарнирный шестизвенник. Звенья 4 и 5 представляют из себя составное коромысло. К шатуну 2 жестко присоединен стержень 7 с чертящей точкой М. На сопряженных концах звеньев 3 и 4, звеньев 4 и 5 имеется по паре ограничителей Р и N, G и S, ограничивающих вращение звеньев относительно друг друга На стойке 6 установлены упор 8, ограничивающий движение звена 5 и упор 9, ограничивающий движение звена 4. Со звеном 4 взаимодействует пружина 10, которая стремится прижать звено 4 к упору 9 и сомкнуть пару ограничителей Р и N. Со звеном 5 взаимодействует пружина 11, которая стремится прижать звено 5 к упору 8 и сомкнуть пару ограничителей G и S. Концы пружин 10 и 11 закреп0 лены на стойке 6.
Механизм работает следующим образом. Примем за начальное положение механизма положение при котором чертящая точка М начинает описывать заданную тра5 екторию. В качестве заданной траектории на чертеже для примера взята дуга окружности радиуса R. При вращении ведущего кривошипа 1 его конец описывает окружность радиусом г и перемещается из поло0 жения Bi в положение В2. В этот момент звено 5 прижато пружиной 11 к упору 8 и неподвижно. Пружина 10 смыкает ограничители Р и N, вследствие чего система звеньев 3 и 4 представляет из себя жесткую
5 конструкцию. Шарнир С, скрепляющий шатун 2 со звеном 3, движется из положения Ci в положение С2 по дуге окружности с центром в шарнире F, скрепляющем звено 5 со звеном 4, который в это время неподви0 жен. Механизм работает в режиме шарнирного четырехзвенника с кривошипом 1, шатуном 2. длина его стойки равна отрезку AFi, длина коромысла равна отрезку FiCi. При прохождении концом В кривошипа 1
5 положений Bi, 82 и какого- либо промежуточного положения точка М находится на окружности R, то есть имеем 3 интерполяционные точки. При достижении концом В кривошипа 1 положения В2 происходит
0 смыкание ограничителей G - S, система звеньев 4-5 становится жесткой конструкцией, звенья 3-4 также представляют в это время из себя жесткую конструкцию, следовательно вся система звеньев 3-4-5 пред5 ставляет из себя жесткую конструкцию. При движении конца В кривошипа 1 из положения В2 в положение Вз жесткость системы звеньев 3-4-5- остается неизменной, чему способствует действие пружин 10 и 11 и
0 сомкнутые пары ограничителей P-N и G-S Механизм работает в режиме шарнирного четырехзвенника с кривошипом 1, шатуном 2, длина его стойки равна отрезку AD, длина коромысла равна отрезку DC2. Шарнир С
5 движется по дуге окружности с радиусом равным отрезку DC2 с центром в точке D Этот режим механизма является основным и для него производится синтез направляющего четырехзвенника по п интерполяционным точкам. При прохождении концом В
кривошипа 1 положений В2. Вз и трех промежуточных положений, точка М находится на дуге окружности R, имеем п интерполяционных точек. При достижении конца В кривошипа 1 положения Ва происходит контакт дополнительного звена 3 с упором 9. При движении конца В кривошипа 1 из положения Вз в положение B/j, механизм работает в режиме шарнирного четырехзвенника с кривошипом 1. шатуном 2, длиной стойки равной отрезку АЕз. длиной коромысла равной отрезку ЕзСз. Шарнир С движется по дуге окружности с радиусом равным отрезку ЕаСз с центром в точке Ез. При прохождении конца В кривошипа 1 положений Вз, В4 и какого либо промежуточного положения точка М находится на окружности R. Имеем три интерпо- ляционные точки. После достижения положения В4 концом В кривошипа 1, точка М перестает отрабатывать заданную траекторию. Кривошип 1 достигает крайнего положения механизма, после которого механизм получает обратный ход и снова поочередно работает в режимах шарнирного четырехзвенника с различными длинами стойки и коромысла. Точка М движется по какой либо траектории, форма которой не задается. Кривошип 1 достигает второго крайнего положения механизма, после которого механизм снова получает прямой ход. Кривошип 1 приходит в положение АВ1, точка М выходит на заданную траекторию, и цикл повторяется.
Механизм позволяет получить движение шатунной точки механизма с высокой точностью по любой, заранее заданной траектории, например, окружности, прямой линии, кривой любого вида и т.д. Если принять
п 5, то прототип будет иметь п + 2 7 интерполяционных точек, а предлагаемый механизм n f 4 9 интерполяционных точек. Точность отработки приближенно повысит- ся в 9 : 7 1,3 раза.
Формула изобретения
Шарнирно-рычажный направляющий
механизм с переменной длиной звена, содержащий стойку, ведущий кривошип, шатун, коромысло, состоящее из двух шарнирно соединенных между собой частей, первая из которых шарнирно соединена со стойкой, два подпружиненных один к другому ограничителя, установленные на соответствующих сопряженных частях коромысла и предназначенные для ограничения их взаимного вращения, и упор,
размещенный на стойке и предназначенный для фиксации первой части коромысла, отличающееся тем, что, с целью повышения точности механизма, он снабжен дополнительным коромыслом, одним
концом шарнирно прикрепленным к концу шатуна, а другим концом шарнирно прикрепленном к свободному концу второй части коромысла, дополнительной парой ограничителей, установленных на соответствующих сопряженных концах дополнительного звена и второй части коромысла и предназначенных для ограничения их взаимного вращения, второй пружиной, один конец которой закреплен на стойке, и вторым упором, установленным также на стойке, а свободный конец второй пружины предназначен для поджатия второй части коромысла к второму упору.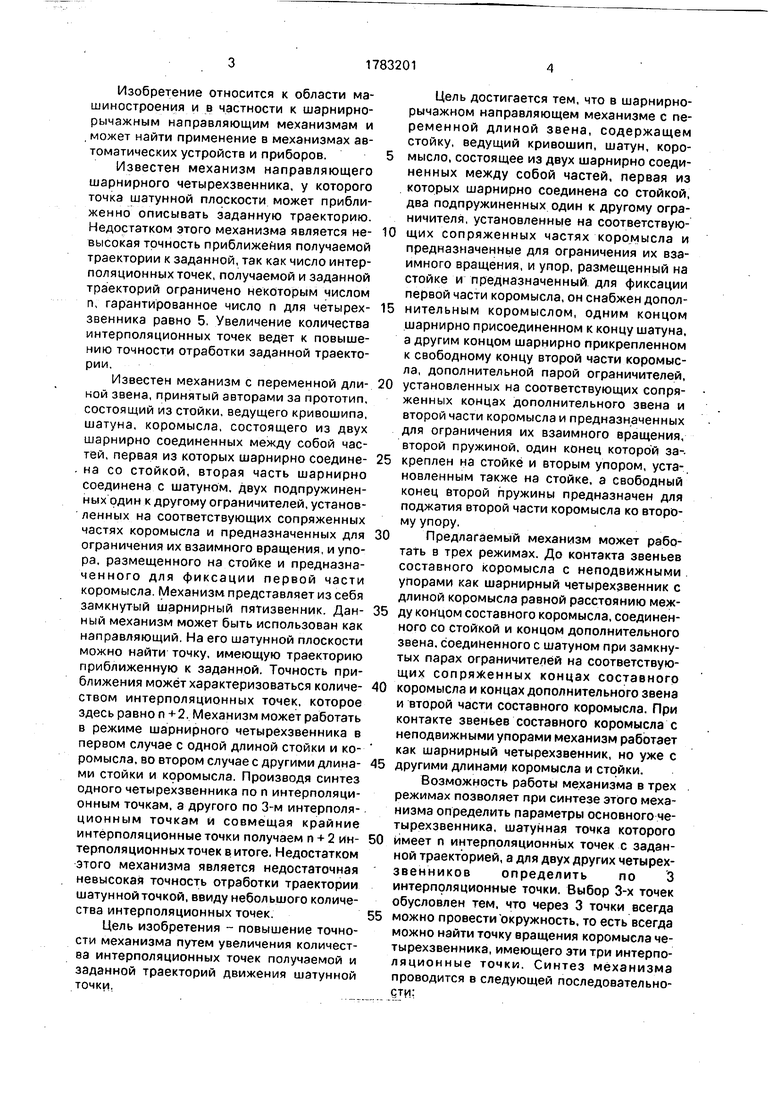
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1993 |
|
RU2075672C1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 1999 |
|
RU2163977C2 |
| Шарнирно-рычажный механизм переменной структуры | 2017 |
|
RU2655129C1 |
| Шарнирно-рычажный механизм переменной структуры | 2017 |
|
RU2655567C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| УСТРОЙСТВО ДЛЯ КИНЕМАТИЧЕСКОГО ИССЛЕДОВАНИЯ ШАРНИРНОГО ЧЕТЫРЕХЗВЕННИКА | 1973 |
|
SU385197A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
| Шарнирно-рычажный механизм с регулируемой длиной звеньев | 2017 |
|
RU2655120C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЯРИМОВА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 2001 |
|
RU2202702C2 |
Изобретение относится к области машиностроения, в частности к шарнирно-рычаж- ным направляющим механизмам, и может найти применение в механизмах автоматических устройств и приборов Целью изо бретения является повышение точности механизма. Указанная цель достигается тем. что механизм снабжен дополнительным коромыслом 3, одним концом шарнирно присоединенном к концу шатуна 2, а другим концом шарнирно присоединенном к свободному концу второй части коромысла 5 дополнительной парой ограничителей, установленных на соответствующих сопряженных концах дополнительного коромысла 3 и второй части коромысла 5 и предназначенных для ограничения их взаимного вращения, второй пружиной 11, один конец которой закреплен на стойке 1 и вторым упором, установленным также на стойке 1 а свободный конец второй пружины 11 предназначен для поджатия второй части коромысла 5 ко второму упору. 1 ил. (Л С ч| со 00 ihO Jo i i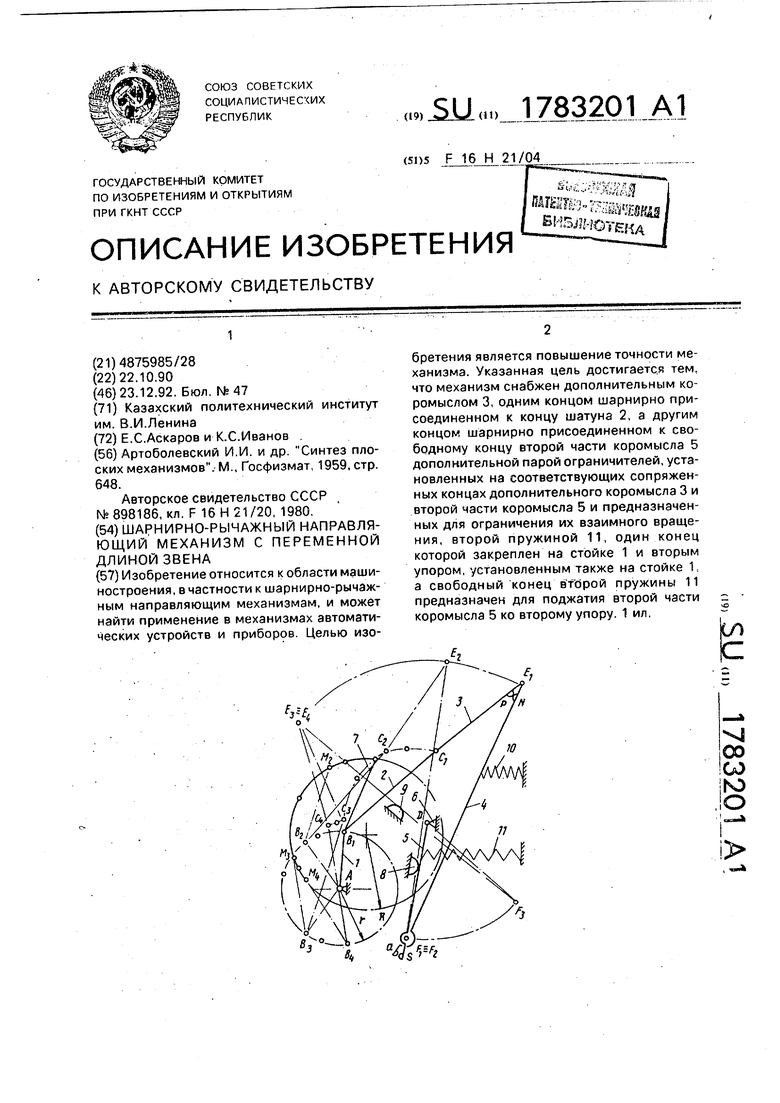
| Артоболевский И.И | |||
| и др Синтез плоских механизмов | |||
| М., Госфизмат 1959, стр | |||
| ПРИБОР ДЛЯ НЕФТЯНОГО ОТОПЛЕНИЯ ПЕЧЕЙ | 1923 |
|
SU648A1 |
| Механизм с переменной длиной звена | 1980 |
|
SU898186A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
