Изобретение относится к шарнирно-рычажным преобразователям непрерывного вращательного движения в колебательное с остановкой и в частности найдет применение в механизмах автоматических устройств и приборов.
Известен шарнирно-рычажный механизм с двумя выстоями, представляющий из себя замкнутый пятизвенный контур с присоединенной к нему двухповодковой кинематической группой, имеется также кулисная группа для фиксации коромысла в крайних положениях и четыре неподвижных упора. Механизм имеет два точных выстоя коромысла в его крайних положениях [1]. Недостатком этого механизма является невозможность получения двух выстоев разных звеньев в противофазе.
Известен шарнирно-рычажный механизм с остановкой, принятый авторами за прототип, содержащий первый четырехзвенник, включающий стойку, установленные на ней ведущий кривошип, промежуточное коромысло и шарнирно связанный с ним основной шатун, второй четырехзвенник, включающий стойку и ведомый кривошип, жестко скрепленный с промежуточным коромыслом и вместе с ним через общий шарнир связанный со стойками первого и второго четырехзвенника, ведомое коромысло и шарнирно связанный с ведомым кривошипом и коромыслом дополнительный шатун и неподвижный упор, второй четырехзвенник представляет из себя ромбоид. В механизме имеется неподвижный кулачок. Механизм позволяет получить один точный выстой ведомого коромысла [2]. Недостатком этого механизма является невозможность получения двух выстоев разных звеньев в противофазе.
Цель изобретения - расширение кинематических возможностей путем получения двух выстоев в противофазе.
Указанная цель достигается тем, что в предлагаемом шарнирно-рычажном механизме с выстоями, содержащем первый четырехзенник, включающий стойку, установленные на ней ведущий кривошип, промежуточное коромысло и шарнирно связанный с ним основной шатун, второй четырехзвенник, включающий стойку и ведомый кривошип, жестко скрепленный с промежуточным коромыслом и вместе с ним через общий шарнир связанный со стойками первого и второго четырехзвенника, ведомое коромысло и шарнирно связанный с ведомым кривошипом и коромыслом дополнительный шатун и неподвижный упор, стойка второго четырехзвенника установлена с возможностью поворота вокруг общего шарнира ведомого кривошипа и промежуточного коромысла, механизм снабжен двухповодковой структурной группой, одни концы первого и второго звеньев которой связаны друг с другом при помощи шарнира, второй конец первого звена шарнирно закреплен в точке крепления дополнительного шатуна и ведомого коромысла, неподвижной стойкой, на которой шарнирно закреплен конец второго звена в точке, расположенной от общего шарнира на расстоянии, равном длине второго звена, пружиной, один конец которой закреплен на неподвижной стойке, а другой - предназначен для поджатия второго звена к неподвижному упору, вторым упором установленным с возможностью перемещения и последующей фиксации и предназначенным для взаимодействия со стойкой второго четырехзвенника, а неподвижный упор предназначен для взаимодействия со вторым звеном двухповодковой группы при нахождении осей шарнира крепления первого, второго звена и общего шарнира на одной прямой.
Сопоставительный анализ с прототипом показывает, что заявляемый шарнирно-рычажный механизм с выстоями отличается наличием двухповодковой структурной группы, подвижного упора, пружины.
Сравнение заявляемого технического решения с прототипом позволяет установить соответствие его критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение от прототипа, не были выявлены и потому они обеспечивают заявляемому техническому решению соответствие критерию "существенные отличия".
На фиг.1 и 2 показана кинематическая схема механизма (основными линиями показано положение механизма при начале выстоя одного звена и конце выстоя другого звена, промежуточные положения показаны штрих-пунктирными линиями).
Механизм состоит из следующих частей: ведущего кривошипа 1 основного шатуна 2, промежуточного коромысла 3, первой стойки 4, которые составляют первый замкнутый четырехзвенный контур, ведомого кривошипа 5, жестко связанного с промежуточным коромыслом 3, дополнительного шатуна 6, ведомого коромысла 7, второй стойки 8, которые составляют второй замкнутый четырехзвенный контур. Первая стойка 4, промежуточное коромысло 3, ведомый кривошип 5, вторая стойка 8 соединены одним общим шарниром D. Вторая стойка 8 является подвижным звеном. К шарниру Е крепления дополнительного шатуна 6 и ведомого коромысла 7 присоединено первое звено 9. К звену 9 шарнирно присоединено второе звено 10, другой конец которого присоединен шарнирно к неподвижной стойке 4 в точке М. Расстояние от точки М до шарнира D равно длине звена 10. При совпадении шарнира N крепления звеньев 9 и 10 с шарниром D, звено 10 находится в контакте с упором 11. С другой стороны на звено 10 воздействует пружина 12, стремящаяся прижать его к упору 11. Конец пружины 12 закреплен на стойке 4. На пути движения звена-стойки 8 установлен упор 13, имеющий возможность изменять свое положение с последующей фиксацией, например, с помощью винта 14 на неподвижной направляющей 15.
Механизм работает следующим образом.
Ведущий кривошип 1 вращается вокруг точки А по часовой стрелке, промежуточное коромысло 3 совместно с ведомым кривошипом 5 совершает колебание на угол ϑ. При движении коромысла 3 и ведомого кривошипа 5 из крайнего внутреннего положения в крайнее внешнее положение, вторая стойка 8 вначале двигается с ними заодно. Контур звеньев 5-6-7-8-9 представляет из себя жесткую фигуру, его жесткость поддерживается усилием пружины 12, которая удерживает шарнир N в точке D. Весь механизм работает в режиме шарнирного четырехзвенника. После того как вторая стойка 8, повернувшись на угол ϑI , упирается в упор 13, дальнейшее ее движение в первоначальном направлении становится невозможным. Ведомый кривошип 5 продолжает свое движение. Контур звеньев 5-6-7-8-9 теряет свою жесткость, ведомое коромысло 7 поворачивается вокруг шарнира F по часовой стрелке, дополнительный шатун 6 вокруг шарнира С против часовой стрелки и тянут звено 9, которое в свою очередь, преодолевая сопротивление пружины 12, поворачивает звено 10 по часовой стрелке на угол ϑo . Механизм работает в режиме 8-ми звенного механизма, полученного последовательным соединением 3-х шарнирных четырехзвенников. Промежуточное коромысло 3 и ведомый кривошип 5 достигают своего крайнего внешнего положения и начинают двигаться в обратную сторону. Все происходит в обратном порядке. Звено 10 возвращается в исходную позицию. Контур звеньев 5-6-7-8-9 снова становится жестким. Вторая стойка 8 снова двигается совместно с промежуточным коромыслом 3 только против часовой стрелки. После достижения промежуточным коромыслом 3 крайнего внутреннего положения, цикл повторяется. Положение ведущего кривошипа 1 при касании упора 13 и отхода от него второй стойки 8 определяется значениями углов ϕ1 и ϕ2 . Угол вращения кривошипа 1 ϕ1 - соответствует углу выстоя звена 10, угол ϕ2 соответствует углу выстоя второй стойки 8, причем ϕ1 + ϕ2= 360о. Изменяя положение упора 13 возможно варьировать значения углов ϕ1 и ϕ2 .
Применение заявляемого механизма позволяет получить в течение цикла два точных выстоя двух разных звеньев в противофазе, продолжительность выстоев можно менять.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный направляющий механизм с переменной длиной звена | 1990 |
|
SU1783201A1 |
| Кулачково-зубчато-рычажный механизм | 1982 |
|
SU1046556A1 |
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1990 |
|
SU1793136A1 |
| Кулачково-зубчато-рычажный механизм | 1983 |
|
SU1114833A1 |
| Кривошипно-кулисный механизм с выстоем ведомого звена | 1988 |
|
SU1504433A1 |
| Пространственный рычажныйМЕХАНизМ C пЕРиОдичЕСКОйОСТАНОВКОй | 1978 |
|
SU796574A1 |
| Автооператор | 1989 |
|
SU1685675A1 |

Изобретение относится к машиностроению, а именно к шарнирно-рычажным механизмам для преобразования непрерывного вращательного движения с остановкой. Целью изобретения является расширение кинематических возможностей путем получения двух выстоев. Указанная цель достигается тем, что стойка 8 второго четырехзвенника установлена с возможностью поворота общего шарнира ведомого кривошипа 5 и промежуточного коромысла 3, а механизм снабжен двухповодковой структурной группой, звенья 9 и 10 которой связаны при помощи шарнира, неподвижной стойкой 25, предназначенной для крепления второго конца звена 10, пружиной 12 - для поджатия второго звена к неподвижному упору 11, подвижным упором 13, предназначенным для взаимодействия со стойкой 8 второго четырехзвенника. При вращении ведущего кривошипа 1 коромысло 3 совместно со звеном 5 совершает колебания. 2 ил.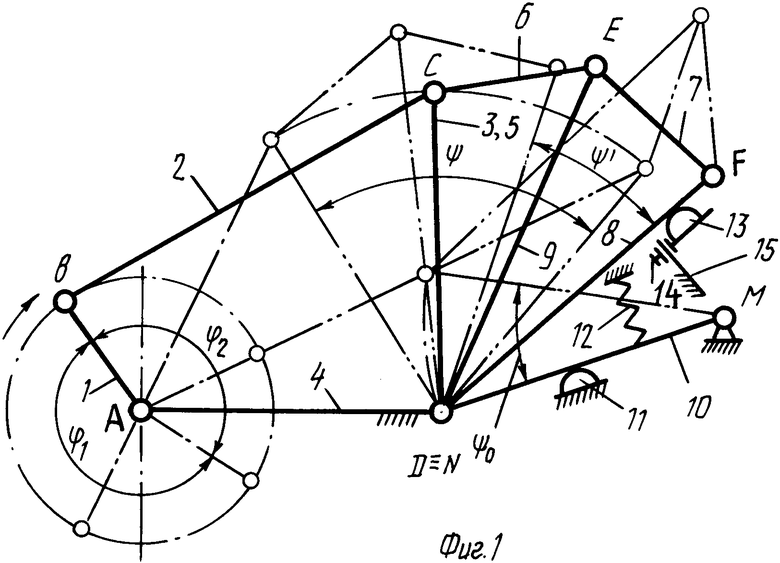
ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ, содержащий первый четырехзвенник, включающий стойку, установленный на ней ведущий кривошип, промежуточные коромысло и шарнирно связанный с ним основной шатун, второй четырехзвенник, включающий стойку и ведомый кривошип, жестко скрепленный с промежуточным коромыслом и вместе с ним через общий шарнир связанный со стойками первого и второго четырехзвенника, ведомое коромысло и шарнирно связанный с ведомым кривошипом и коромыслом дополнительный шатун и неподвижный упор, отличающийся тем, что, с целью расширения кинематических возможностей путем получения двух выстоев, стойка второго четырехзвенника установлена с возможностью поворота вокруг общего шарнира ведомого кривошипа и промежуточного коромысла, механизм снабжен двухповодковой структурной группой, одни концы первого и второго звеньев которой связаны между собой при помощи шарнира, а второй конец первого звена шарнирно закреплен в точке крепления дополнительного шатуна и ведомого коромысла, неподвижной стойкой, на которой шарнирно закреплен другой конец второго звена в точке, расположенной от общего шарнира на расстоянии, равном длине второго звена, пружиной, один конец которой закреплен на неподвижной стойке, а другой предназначен для поджатия второго звена к неподвижному упору, вторым упором, установленным с возможностью перемещения и последующей фиксации и предназначенным для взаимодействия со стойкой второго четырехзвенника, а неподвижный упор предназначен для взаимодействия с вторым звеном двухповодковой группы при нахождении осей шарнира крепления первого звена, второго звена и общего шарнира на одной прямой.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1546749, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
