Изобретение относится к авиационным комплексам, обеспечивающим условия снижения аварийности при полетах по сложным маршрутам, в районах взлетно-посадочных полос (ВПП) и при посадке - наиболее ответственного этапа эксплуатации летательного аппарата (ЛА). При всем многообразии серийных аппаратурных комплексов, успешно решающих задачи навигации и посадки на стационарных аэродромах, возможностей их использования лишены небольшие ЛА и ВПП, ввиду: высокой стоимости, больших эксплуатационных работах ограничениях габаритов, веса и т.п. Следовательно, для этого класса ЛА и ВПП остается высокой вероятность аварийных ситуаций и низкой эффективности эксплуатации. Последнее зависит от ограничений летных часов условиями видимости (в рамках светового дня и погодных условий).
В качестве аналогов можно рассматривать радионавигационные устройства, которые подразделяются на системы дальней (Лоран-А, Лоран-C, Омега), средней (Дека, Пирс-1) и ближней навигации [1]. Однако точность конечных измерений во многих случаях оказывается гораздо ниже потенциальной точности используемых РНС в силу целого ряда сложно учитываемых факторов:
условий распространения поверхностных и пространственных радиоволн в различное время суток и сложностями их разделения;
зависимостью удаленности от опорной станции;
отклонения скорости распространения р/волн от номинальной в зависимости от подстилающей поверхности.
Приведенные нестабильности, ограничивающие точность измерения координат, устраняются посредством многочисленных поправок, излагаемых в специализированных таблицах и справочниках. Выбор правильного типа поправок представляет значительные трудности, что и является причиной систематических ошибок в определении места. Известна импульсно-фазовая система наземного комплекса привязки координат, использующая принцип ретрансляции опорного сигнала упорядоченной сетью станций с фиксированными параметрами: координатами (X, Y) привязки к местности и, высотами установки (H) приемо-передающих антенн. Алгоритм системы, структурные реализации станций и приемников-вычислителей, совмещенных с подвижными объектами, позволяют при нестабильностях частот опорных генераторов Δf/fг= 10-8 получать высокие точности измерения координат, исключая статические и случайные погрешности, обусловленные: временной задержкой обнаружения опорного сигнала, временной нестабильностью задержки ретрансляции, пространственными флуктуациями фазы р/волн. Это обеспечивается формированием двух частот: опорной fо (измерительной) и несущей fн (информационной). Станции трассы ретрансляции поочередно (в соответствии с адресным указанием) из пассивного режима "прием" переходят в активный режим "передача", последовательно во времени излучая в эфир опорную частоту fо и информационную р/посылку с несущей частотой fн. При этом составляющие информационной р/посылки имеют жесткую привязку к фазе (0o, 180o) частоты fо. Частота fо активной станции на временном интервале излучения принимается за временный эталон (Fо), относительно которого находящиеся в зоне досягаемости станции и приемники-вычислители корректируют фазы внутренних опорных частот fо. Повышенная точность обеспечивается фиксацией и последующим учетом в вычислениях координат (Xо, Yо) объекта фазовой невязки частот fо опорных станций и фазовой невязки частот fо приемника-вычислителя с опорными станциями.
В качестве аналогов рассматриваются технические решения, предлагаемые для посадки на ВПП с ограниченным наземным обеспечением техническими средствами. Отклонения от курса посадки в этих случаях вычисляются по сигналам бортовых радиолокационных станций (РЛС), взаимодействующих: 1) с двумя пассивными отражателями, расположенными на концах ВПП [3]; 2) с одним пассивным отражателем [3] (выбранного в качестве прототипа), расположенными в точке равноудаленной от торцов ВПП при фиксированном смещении от ее продольной оси [4]. При всей привлекательности этих решений в условиях прямой видимости прохождения р/локационного сигнала. Они не решают задач навигации и недостаточно надежны, вследствие использования механически сканирующих антенн РЛС, т.е. имеется необходимость в многофункциональном навигационном комплексе, используемом в качестве основного или дублирующего, который удовлетворял бы требованиям:
всепогодность и обслуживание неограниченного числа ЛА;
контроль на всех этапах движения ЛА (как минимум, на постоянных маршрутах);
высокая точность и надежность навигационных измерений;
жесткие ограничения по габаритам и весу аппаратуры;
простота обслуживания и съема информации;
возможность документирования точности движения;
минимум сигнального обустройства ВПП, возможность безоператорной эксплуатации.
Определившись с базовой системой [3], мы вынуждены констатировать что ни одно из приведенных устройств не обеспечивает комплексного решения задачи в объеме приведенных выше требований, обеспечивающих снижение аварийности и повышение эффективности системы.
Цель изобретения - снижение аварийности летной работы при полетах по сложным маршрутам и на технически слабо оборудованных ВПП, повышение эффективности эксплуатации небольших ЛА и ВПП.
Цель реализуется РНС "Багис-С" (контроль полета и посадки ЛА), состоящей из наземного комплекса привязки координат ЛА и бортовых устройств, блок хранения координат ВПП, последовательно соединенные вычислитель горизонтального отклонения и блок индикации горизонтального отклонения, последовательно соединенные барометрический высотомер, корректор базы высот, вычислитель вертикального отклонения и блок индикации вертикального отклонения. Последовательно соединенные вычислитель расстояния и программный формирователь сигналов допустимых отклонений, выходы которого подключены к вторым входам блоков индикации горизонтального и вертикального отклонений. Выход вычислителя расстояний одновременно подключен к входу программного датчика оптимальной высоты глиссады и к входу блока индикации расстояния. Введены последовательно соединенные формирователь адресов, блок памяти параметров маршрута, первый коммутатор и вычислитель курса, выход которого соединен с входом вычислителя горизонтального отклонения, вторым входом подключенного к выходу приемника-вычислителя координат ЛА. Одновременно, выход приемника-вычислителя соединен со входом вычислителя расстояния, вторым входом подключенного к выходу первого коммутатора, вторым входом соединенного с выходом блока хранения координат ВПП. При этом упомянутый выход вычислителя расстояния одновременно подключен к входам формирователя адресов и формирователя опорной траектории высот, второй и третий входы которого соединены соответственно с первым и вторым выходами блока памяти параметром маршрута, а выход - через второй коммутатор, вторым входом соединенный с выходом программного датчика оптимальных высот глиссады, подключен к второму входу вычислителя вертикального отклонения. Выход барометрического высотомера одновременно соединен со входом приемника-вычислителя координат ЛА. При этом третьи входы первого коммутатора, вычислителя расстояния и второго коммутатора подключены к выходу триггера режима, одновременно соединенного со вторыми входами корректора базы высот и программного формирователя сигналов допустимых отклонений.
В устройство дополнительно введен блок масштабирования, включенный между выходом вычислителя расстояния и третьими входами блока индикации вертикального отклонения и блока индикации горизонтального отклонения. Второй вход блока масштабирования соединен с выходом триггера режима.
В устройство дополнительно введен фиксатор "нониусных" смещений, соединенный с выходом триггера режима и включенный между вторым выходом приемника-вычислителя координат и дополнительным входом блока индикации горизонтального отклонения.
На фиг. 1 приведена функциональная схема бортового устройства контроля полета, где: 1 - приемник-вычислитель координат; 2 - блок хранения координат ВПП (Q1, Q2); 3 - вычислитель горизонтального отклонения; 4 - блок индикации горизонтального отклонения; 5 - барометрический высотомер; 6 - корректор базы высот; 7 - вычислитель вертикального отклонения; 8 - блок индикации вертикального отклонения; 9 - вычислитель расстояния; 10 - программный формирователь допустимых отклонений; 11 - программный датчик оптимальных высот глиссады; 12 - блок индикации расстояния; 13 - формирователь адресов; 14 - блок памяти параметров маршрутов; 15 - первый коммутатор; 16 - вычислитель курса; 17 - формирователь опорной траектории высот; 18 - второй коммутатор; 19 - триггер режима (полета/посадка); 20 - блок масштабирования; 21 - радиовысотомер; 22 - третий коммутатор; 23 - фиксатор "нониусного" смещения.
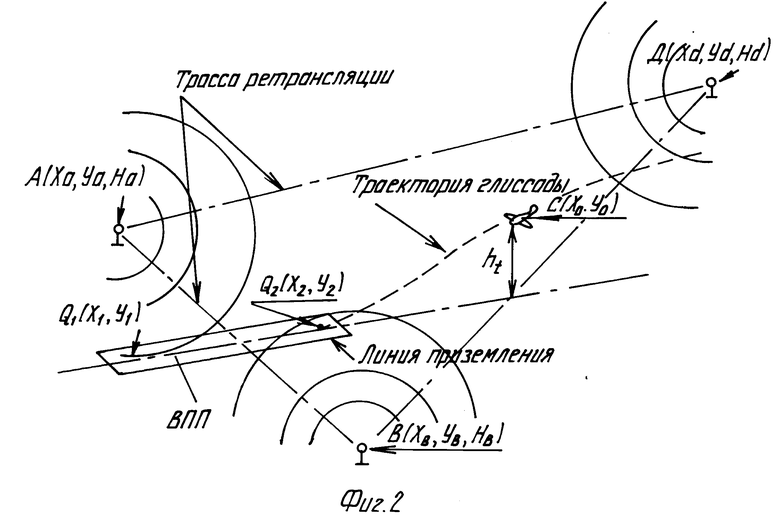
На фиг. 2 представлен вариант размещения станций ретрансляторов (А, В, Д) в зоне ВПП.
На фиг. 3 дан вариант размещения станций ретрансляторов на протяженном маршруте полета. Здесь q1 (X1, Y1), q2 (X2, Y2), q3 (X3, Y3), ... - опорные координаты маршрута полета. Промежуточные значения маршрута лежат на аппроксимирующей прямой, определяющей курсовое направление.
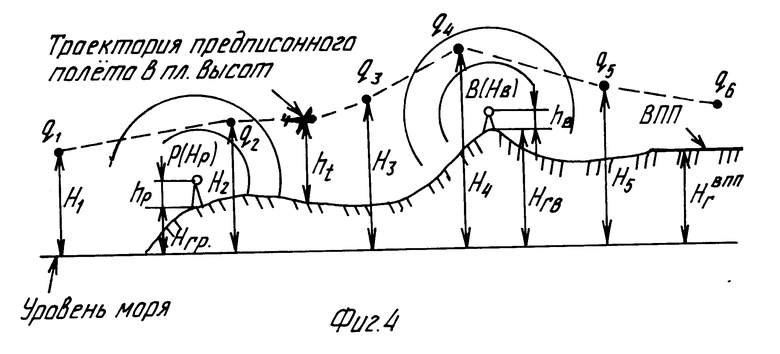
На фиг. 4 представлен вариант предписанной траектории полета в плоскости высот. Здесь через H отмечены высоты от общей базы (уровня моря), а через h - высоты от уровня местности. P(Hp), В(Hв) - станции ретрансляторы.
На фиг. 5 представлен вариант структурной реализации формирователя 17 опорной траектории высот, где: 24, 25 - сдвиговые регистры; 26 - вычислитель опорных расстояний; 27 - формирователь коэффициента приращения; 28 - пороговый ограничитель; 29 - сдвиговый регистр; 30 - вычитатель; 31 - умножитель; 32 - сумматор.
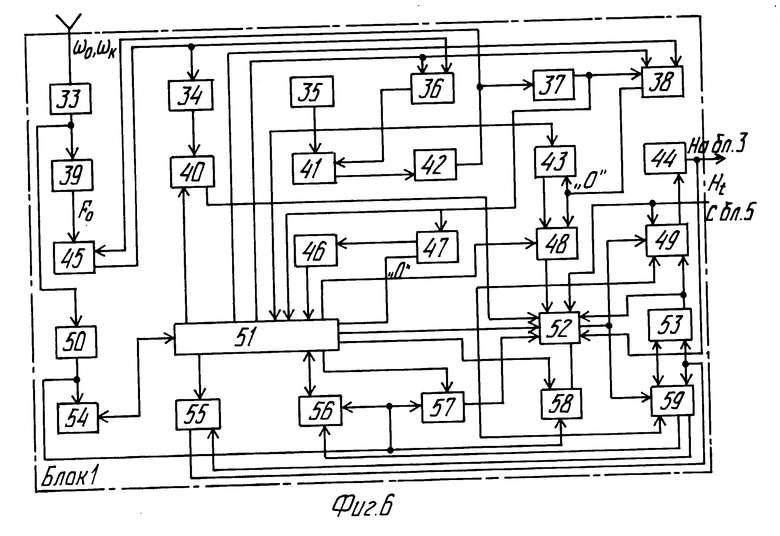
На фиг. 6 представлен один из вариантов функциональной реализации приемника-вычислителя 1, где: 33 - блок антенны; 34 - аналого-цифровой преобразователь (АЦП); 35 - генератор стабильной частоты; 36 - ключ; 37 - формирователь импульсов сброса; 38 - логическая схема И; 39 - активный полосовой фильтр (fо); 40 - четвертый блок регистров; 41 - блок коррекции фазы; 42 - дискретный делитель частоты; 43 - счетчик временных интервалов; 44 - блок фиксации координат; 45 - фазовый дискриминатор; 46 - дешифратор; 47 - второй счетчик; 48 - второй блок регистров; 49 - вычислитель координат; 50 - согласованный р/приемник; 51 - синхронизатор; 52 - вычислитель дальностей; 53 - первый блок регистров; 54 - обнаружитель служебных сигналов; 55 - третий блок регистров; 56 - блок памяти параметров станций; 57 - блок сравнения кодов станций; 58 - блок регистров хранения констант; 59 - оптимизатор выбора опорных станций.
Работа устройства. Состояние триггера 19 определяет режим (полет/посадка) функционирования системы. В режиме "полет" на выход первого коммутатора 15 выход формирователя 17 в определенной очередности проходят координаты (X, Y) опорных точек (q1, q2, q3, ...) маршрута (фиг. 3) с соответствующих выходов блока памяти 14. Одновременно, с другого выхода блока памяти 14 на второй вход формирователя 17 синхронно выдаются уровни высот (H1, H2, H3, ....), соответствующие опорным координатам. В блоке 16 вычисляются коэффициенты курса ЛА: Ax, By, Cо, соответствующие уравнению прямой, проведенной через координаты двух не совпадающих точек Xн, Yн и Xк, Yк, которым присваиваются координаты очередных опорных точек, определяющих текущее направление полета. Запись такого уравнения в общем виде:
Величина горизонтального отклонения (d) ЛА относительно курсового направления (уравнение 1) формируется на выходе блока 3, реализующего функцию
Xо, Yо - текущие координаты ЛА с выхода приемника-вычислителя 1.
В режиме "полет" вычислитель 9 определяет текущую удаленность (St) ЛА от координат (Xк, Yк) очередной опорной точки.

Зная величину d и St не сложно вычислить угловую величину отклонения (в случае необходимости),
Изменение адреса на выходе формирователя 13 производится на каждый цикл условия St≤ Δ, где Δ - минимальное расстояние до текущей опорной точки, зависящее от допустимой ширины коридора маршрута. Здесь под циклом понимается временной интервал, на котором St от максимального значения, вызванного сменой адреса на выходе формирователя 13, изменяется до минимального (Δ). На выход коммутатора 15 проходят координаты очередной по ходу движения опорной точки, а величина St на выходе вычислителя 9 скачком принимает новое значение. В режима "полет" величина вертикального отклонения (ΔH) ЛА от заданной траектории ΔH = Hо - Ht формируется на выходе вычислителя 7. Здесь Ht - высотный уровень ЛА, определенный по барометрическому измерителю 5, а Hо - прошедший через второй коммутатор 18 опорный уровень высоты с выхода формирователя 17 (фиг. 5). Структура последнего исключает скачкообразное изменение высоты при смене адреса на выходе формирователя 13. Работа формирователя 17 ясна из названий входящих в него узлов и нуждается лишь в минимальных пояснениях. На выходе вычислителя 26 опорных расстояний имеем:
а коэффициент Rt на выходе блока 27 находится из условия: Rt = (1 - St/Sопор.). Пороговый ограничитель 28 реализует логическую функцию; если Rt < 0, то Rt = 0. На выходе вычитателя 30 выделяется разность высот:
ΔHp= Hn-Hn-1,
а на выходе сумматора 32 имеем:
Ho= Hn-1+ΔHp•kt.
В блоке памяти 14 могут быть заложены параметры нескольких маршрутов (в зоне ВПП либо конечные пункты, имеющие оборудованные трассы). Выбор маршрута обеспечивается заданием соответствующего адреса формирователя 13, одним из узлов которого является реверсивный счетчик с начальной установкой.
При переходе в режим "посадка" пилот изменяет состояние триггера 10, который переключает коммутаторы 15 и 18, вследствие чего на их выходы проходят сигналы блоков 2 и 11. Оценка курсового направления в режиме "посадка" производится относительно граничных координат Q1 и Q2 ВПП, совпадающих с линией приземления и продольной осью симметрии (фиг. 2). В зависимости от направления ветра, пилот имеет возможность воздействия на блок 2 обеспечить адресацию хранимых координат Q1, Q2 текущему определению начала и конца ВПП. Работа блоков 3 и 16 остается неизменной, т.е. описывается приведенными выражениями 1 и 2. Изменяется алгоритм блока 9; значения St вычисляются относительно линии приземления, на фиксированную величину Δl, отстоящую от начала ВПП. В этом случае имеем:
где
Xн, Yн в зависимости от направления посадки принимают значения опорных координат ВПП Q1 или Q2. Программный датчик 11 начинает функционировать при условии St≤Sg, формируя на выходе оптимальную для ЛА траекторию глиссады, где hopt - программно заданная функция от St. Задача пилота или автопилота, воздействием на рычаги управления, обеспечить максимально возможное совпадение траектории ЛА ht (St) с оптимальной. Визуализацию отклонений от заданной траектории в горизонтальной (±d) и вертикальной (Δh=hopt-ht) плоскостях, а также визуализацию текущего значения St до планируемой линии приземления обеспечивают соответствующие блоки 4, 8 и 12. Одновременно, блоками 4, 8 визуализируются сигналы допустимой величины отклонения Gmax, формируемые блоком 10. Физический смысл величины Gmax - это тангенс максимально допустимого углового отклонения, который определен в Указании МГА 3,1 - 48 от 28.08.79. Согласно этому документу Gmax = 0,032, что позволяет по текущему значению St вычислять допустимые отклонения (∓ Δhm, ∓ dm) траектории снижения и бокового уклонения ( = Gmax•St). Ведомственная инструкция не исключает международных стандартов ограничений, причем последние могут быть различными для вертикального и горизонтального отклонений. Связь блока 10 с триггером 19 позволяет в режиме "полет" реализовать любые требования на ширину и высоту маршрутного коридора. При двух или трехмерной визуализации отклонений ЛА от заданной траектории - масштабирование 20 (непрерывное или дискретное) повышает эффективность восприятия текущей информации. С этой же целью блока 4, 8, 12 могут быть снабжены звуковыми сигнализаторами превышения допустимых ограничений.
= Gmax•St). Ведомственная инструкция не исключает международных стандартов ограничений, причем последние могут быть различными для вертикального и горизонтального отклонений. Связь блока 10 с триггером 19 позволяет в режиме "полет" реализовать любые требования на ширину и высоту маршрутного коридора. При двух или трехмерной визуализации отклонений ЛА от заданной траектории - масштабирование 20 (непрерывное или дискретное) повышает эффективность восприятия текущей информации. С этой же целью блока 4, 8, 12 могут быть снабжены звуковыми сигнализаторами превышения допустимых ограничений.
В режимах полет/посадка определим возможные варианты: аппаратных измерений высоты ЛА, базовой привязки опорных высот, а также базовой привязки высот на воде приемника-вычислителя 1 координат. Все варианты сведены в таблицу, где через H обозначены измерения барометрическим высотомером и задание опорных высот относительно уровня моря, а через h - измерения радиовысотомером и задание опорных высот относительно местности (фиг. 4).
Анализ показывает, что оптимальным является первый вариант, когда на маршруте используется барометрический высотомер, а при посадке более точный радиовысотомер. Это типовая практика, но нельзя исключать и другие варианты. Исходя из первого (оптимального) варианта, представлена реализация структуры корректора базы высот 6 (фиг. 1). В других вариантах потребуется изменить структуру блока 6 и его связь с барометрическим высотомером, а также форму задания опорных высот в блоке 11 или 14. В практической реализации ложные срабатывания блока 11 в режиме полет (не отражающиеся на качественных показателях) блокируются введением информации о состоянии триггера режима 19.
Устройство обеспечивает контроль положения ЛА на ВПП и после приземления. Физическая информация о контакте с землей поступает на вычислитель 9, вследствие чего блок индикации 12 отражает текущее расстояние St до конца ВПП. Т.е. для вычисления используется выражение 3, где Xк и Yк присваиваются координаты соответствующей опорной точки ВПП. Блоки 3, 9, 11, 16 и 17 предпочтительны в программной реализации на микропроцессорной основе, что обеспечит портативность устройства. В равной степени это относится и к приемнику-вычислителю координат ЛА, реализация которого должна удовлетворять жестким требованиям по точности и быстродействию измерения. Реально использованное РНС с частотным принципом определения навигационного параметра. Измерители на основе доплеровского сдвига частот (ДСЧ) применяются в спутниковых РНС (Транзит, Навстар). Величина ДСЧ определяется известной формулой
где
f - несущая частота передатчика ИСЗ;
C - скорость распространения р/волн (3•105 км/с);  - скорость изменения расстояния от объекта до ИСЗ. Определение координат по измерениям ДСЧ производится одним из двух методов - дифференциальным или интегральным. В литературе приводятся сравнительные оценки этих методов (5, с. 240 - 257), даются их точностные параметры. В качестве недостатков указываются: значительная продолжительность сеанса измерения, погрешности, обусловленные учетом реального курса, скорости объекта и ИСЗ, влияние рефракции р/волн в ионосфере и тропосфере, значительная и неравномерно изменяющаяся дискретность обсервации, сложность всей системы. Применительно к решаемой задаче, многие из этих недостатков теряют свою актуальность. Оценим ДСЧ исходя из условий: fо = 105 Гц,
- скорость изменения расстояния от объекта до ИСЗ. Определение координат по измерениям ДСЧ производится одним из двух методов - дифференциальным или интегральным. В литературе приводятся сравнительные оценки этих методов (5, с. 240 - 257), даются их точностные параметры. В качестве недостатков указываются: значительная продолжительность сеанса измерения, погрешности, обусловленные учетом реального курса, скорости объекта и ИСЗ, влияние рефракции р/волн в ионосфере и тропосфере, значительная и неравномерно изменяющаяся дискретность обсервации, сложность всей системы. Применительно к решаемой задаче, многие из этих недостатков теряют свою актуальность. Оценим ДСЧ исходя из условий: fо = 105 Гц,  = 350 км/ч, tизм = 102/fо - временной интервал "съема" информации с опорной станции. Тогда будем иметь: Fd(t) = 105•0,1/3•105 = 0,03 Гц. Если рассматривать Fd как нестабильность, внесенной ДСЧ, то Δf/f = 3•10-7. При tизм. = 1 мс временная нестабильность этого интервала Δtизм = 0.3 нс, что составит 3•10-5 долю периода Tо - величина настолько малая, что вносимой ДСЧ погрешностью можно пренебречь. Выходные сигналы станций ретрансляторов наземного комплекса привязки координат ЛА позволяют реализовать в месте приема и частотный метод, используя несущую fн информационной части опорной радиопосылки. Представленная на фиг. 6 функциональная схема приемника-вычислителя РНС построена на измерении в точке приема промежутка времени между моментами прихода опорных сигналов от станций ретрансляторов. Априорные сведения о параметрах опорных станций (координатах, высотах установки антенн, временной задержки ретрансляции) и параметрах информационной радиопосылки позволяют через вычисление расстояния до них выйти на оценку координат места приема радиосигналов.
= 350 км/ч, tизм = 102/fо - временной интервал "съема" информации с опорной станции. Тогда будем иметь: Fd(t) = 105•0,1/3•105 = 0,03 Гц. Если рассматривать Fd как нестабильность, внесенной ДСЧ, то Δf/f = 3•10-7. При tизм. = 1 мс временная нестабильность этого интервала Δtизм = 0.3 нс, что составит 3•10-5 долю периода Tо - величина настолько малая, что вносимой ДСЧ погрешностью можно пренебречь. Выходные сигналы станций ретрансляторов наземного комплекса привязки координат ЛА позволяют реализовать в месте приема и частотный метод, используя несущую fн информационной части опорной радиопосылки. Представленная на фиг. 6 функциональная схема приемника-вычислителя РНС построена на измерении в точке приема промежутка времени между моментами прихода опорных сигналов от станций ретрансляторов. Априорные сведения о параметрах опорных станций (координатах, высотах установки антенн, временной задержки ретрансляции) и параметрах информационной радиопосылки позволяют через вычисление расстояния до них выйти на оценку координат места приема радиосигналов.
Требование по точности измерения особенно важно на заключительном этапе пилотирования - посадки ЛА [5]. Наиболее ответственная часть задачи - это обеспечение жесткого контроля за поперечными смещениями ЛА относительно продольной оси симметрии ВПП. Проблема решается введением дополнительного блока - фиксатора "нониусных" смещений 23 (фиг. 7). В режиме "посадка" блок 23 реализует метод разностной оценки опорных сигналов от станций ретрансляторов A (Xa, Ya) и В (Xв, Yв), симметрично расположенных относительно продольной оси ВПП (фиг. 2). При сравнительно небольшом расстоянии между этими станциями не сложно обеспечить когерентность их радиоизлучений, например, запитав от общего опорного генератора. Блоком 23 одновременно реализуются два независимых метода оценки: по разности ДСЧ и сравнением фаз опорных сигналов. Принимая во внимание, что эффект Доплера наиболее ощутимо проявляется при высоких частотах, здесь используется несущая частота fн информационной радиопосылки, связанная с частотой fо опорного сигнала соотношением fн = (10 - 104)•fо. При fо = 105 Гц, а fн = 108 Гц и  = 350 км/ч, будем иметь предельные величины ДСЧ = ±30 Гц. В этих же условиях фазовый метод обеспечивает возможность оценки поперечного смещения ЛА в пределах ±1.5 м. Эти оценки производятся с частотой цикла ретрансляции, в то время как вычисление координат Xо, Yо на выходе блока 1 может не вписаться в этот временной интервал. При трех опорных станциях и времени одного цикла в пределах 5 мс - частота повторной оценки = 200 Гц. Очевидна многократная избыточность информации, т.е. за время между циклами ЛА сместится вдоль ВПП всего на 0.5 м, а поперечные смещения будут на несколько порядков ниже.
= 350 км/ч, будем иметь предельные величины ДСЧ = ±30 Гц. В этих же условиях фазовый метод обеспечивает возможность оценки поперечного смещения ЛА в пределах ±1.5 м. Эти оценки производятся с частотой цикла ретрансляции, в то время как вычисление координат Xо, Yо на выходе блока 1 может не вписаться в этот временной интервал. При трех опорных станциях и времени одного цикла в пределах 5 мс - частота повторной оценки = 200 Гц. Очевидна многократная избыточность информации, т.е. за время между циклами ЛА сместится вдоль ВПП всего на 0.5 м, а поперечные смещения будут на несколько порядков ниже.
Источники информации:
1. Лесков М.М. и др. Навигация. М.: Транспорт, 1986.
2. Патент ФРГ N 1406587, кл. G 05 D 1/10, 1971.
3. Устройство для управления заходом самолета на посадку. Авт. св. N 783482, кл. G 05 D 1/10, 1990.
4. Система контроля посадки летательных аппаратов. Заявка на патент N 94018425.
5. Михалев И. А. Системы автоматической посадки. М.: Машиностроение, 1975.
6. Колчинский В.Е. и др. Доплеровские устройства и системы навигации. М. : Сов. радио, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |



Радионавигационная система содержит наземную сеть станций с фиксированными параметрами и бортовые устройства летательных аппаратов. Последние содержат приемник-вычислитель координат, блок хранения координат взлетно-посадочных полос, вычислитель горизонтального и вертикального отклонений и блоки их регистрации, вычислитель расстояния, а также датчик оптимальной высоты глиссады, вычислитель курса, формирователь опорной траектории высот, блок памяти параметров маршрутов, высотомер, корректор базы и триггер режима. Система наземного базирования взаимодействует со специализированной бортовой аппаратурой и решает задачи выведения на заданный курс, контроль снижения по оптимальной траектории и контроля положения летательного аппарата на взлетно-посадочной полосе. 1 с. и 2 з.п. ф-лы, 6 ил., 1 табл.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, кл.G 05 D 1/10, 1992 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лесков М.М | |||
| и др | |||
| Навигация | |||
| - М.: Транспорт, 1986, с | |||
| Ускоритель для воздушных тормозов при экстренном торможении | 1921 |
|
SU190A1 |
