Изобретение относится к радиолокационным системам посадки летательных аппаратов (ЛА) и может быть использовано в системах управления воздушным движением.
Известны комплексные системы посадки (КСП) ЛА, использующие радиолокационные средства, построенные с применением сложной авиационной техники и направленной на обеспечение высокого уровня безопасности полетов (БП) [1, 2].
Большие возможности для обеспечения БП связаны с повышением физиологических и психологических возможностей пилота и диспетчера посадки.
Одним их таких направлений является использование в КСП посадочного радиолокатора и двусторонней линии передачи данных между диспетчером и пилотом, благодаря которой осуществляется идентичное восприятие полетной информации диспетчером посадки и пилотом при непрерывном наблюдении векторов скоростей ЛА на индикаторах курса и глиссады [3]. При этом наиболее совершенным является КСП, в котором формируются не только векторы текущих скоростей, но и векторы оптимальных скоростей по курсу и глиссаде, а в процессе посадки производится совмещение соответствующих векторов скоростей [4].
Другим перспективным направлением для обеспечения посадки ЛА является использование спутниковых навигационных систем: группировки навигационных спутников (ГНС) на орбитах Земли (системы GPS и Глонасс), например [5].
Это позволяет снизить стоимость КСП и охватить автоматизированными системами посадки необорудованные аэропорты.
Известна КСП [6], которая для повышения надежности использует возможность работы либо с радиолокатором, либо с ГНС.
Однако недостатком такой известной КСП [6] является взаимоисключающее использование радиолокатора и ГНС, что не позволяет производить сравнительную оценку данных о координатах ЛА, полученных от различных навигационных систем.
Прототипом заявляемого изобретения является КСП, в которой наряду с указанными выше свойствами КСП [3, 4] предусмотрено отображение рельефа местности и ситуации на летном поле [7].
Такая комплексная система посадки летательных аппаратов содержит наземную аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» посадочный радиолокатор, блок обработки информации, блок вычисления координат, наземный видеопреобразователь, индикатор диспетчера посадки, входящий в пульт диспетчера посадки, бортовую аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» пилотажно-навигационный блок, бортовой видеопреобразователь, индикатор пилота, входящий в пульт пилота, двустороннюю линию передачи данных с наземными и бортовыми приемниками, передатчиками и антенными системами, бортовые формирователи векторов текущих курсовой и глиссадной скоростей и наземный разделитель векторов курсовой и глиссадной скоростей, входы бортовых формирователей текущих курсовой и глиссадной скоростей подключены к первому дополнительному выходу пилотажно-навигационного блока, выходы бортовых формирователей векторов текущих курсовой и глиссадной скоростей подключены к входам бортового передатчика и одновременно соответственно к первому и второму дополнительным входам бортового видеопреобразователя, выход наземного приемника через разделитель векторов курсовой и глиссадной скоростей подключен к первому и второму дополнительным входам наземного видеопреобразователя, а также содержит преобразователь параметров границ вертикальной и горизонтальной видимости, формирователи векторов скоростей ветра по курсу и глиссаде, бортовые формирователи векторов оптимальных курсовой и глиссадной скоростей, бортовой разделитель наземной информации, при этом выходы формирователей скоростей ветра по курсу и глиссаде соединены с первым дополнительным входом блока вычисления координат, второй дополнительный вход которого соединен с выходом преобразователя параметров границ вертикальной и горизонтальной видимости, выход бортового приемника двусторонней линии передачи данных соединен с входом бортового разделителя наземной информации, первый выход которого соединен с дополнительным входом пилотажно-навигационного блока, а второй выход соединен с первыми входами бортовых формирователей оптимальных курсовой и глиссадных скоростей, вторые входы которых соединены с вторым дополнительным выходом пилотажно-навигационного блока, а выходы которых соединены соответственно с третьим и четвертым дополнительными входами бортового видеопреобразователя и дополнительными входами бортового передатчика, дополнительно в наземную аппаратуру введены узел сопряжения информации, радиолокатор обзора летного поля, формирователь карты летного поля, база данных аэропорта, наземная база данных рельефа, наземный формирователь проекций рельефа по курсу и глиссаде, в бортовую аппаратуру введены бортовая база данных рельефа и бортовой формирователь проекций рельефа по курсу и глиссаде, а пульт пилота и пульт диспетчера выполнены соответственно с наземным и бортовым переключателями масштабов, при этом выход блока вычисления координат соединен с первым входом узла сопряжения информации, соединенного выходом с входом наземного передатчика, выход радиолокатора обзора летного поля соединен с входом формирователя карты летного поля, выход которого соединен с первым базовым входом наземного видеопреобразователя и с вторым входом узла сопряжения информации, выход базы данных аэропорта соединен с вторым базовым входом наземного видеопреобразователя и с третьим входом узла сопряжения информации, выход наземной базы данных рельефа соединен с первым входом наземного формирователя проекций рельефа по курсу и глиссаде, второй вход которого соединен с выходом блока вычисления координат, а выход которого соединен с третьим базовым входом наземного видеопреобразователя, выход бортовой базы данных рельефа соединен с первым входом бортового формирователя проекций рельефа по курсу и глиссаде, второй вход которого соединен с первым выходом бортового разделителя наземной информации, а выход упомянутого бортового формирователя соединен с базовым входом бортового видеопреобразователя, выходы наземного и бортового переключателей соединены соответственно с управляемыми входами индикаторов диспетчера посадки и пилота, а выход бортового переключателя дополнительно подключен к масштабирующему входу бортового передатчика, причем упомянутые переключатели выполнены трехпозиционными, позиции которых последовательно соответствуют масштабам дальностей на трех этапах посадки, определяемым соответственно максимальной дальностью при заходе на посадку, дальностью, соответствующей высоте принятия решения о посадке, и расстоянием, равным длине взлетно-посадочной полосы.
Задачей заявляемого изобретения является дальнейшее повышение БП благодаря использованию положительных характеристик как КСП, в которых осуществляется использование радиолокатора и двусторонней линии передачи данных, обеспечивающей повышение общих эргономических характеристик КСП, так и КСП, в которых осуществляется использование наряду с радиолокатором упомянутой группировки спутников, повышающее общую надежность.
При этом предлагается одновременное использование радиолокационных и спутниковых систем и совместная обработка данных, формируемых каждой из упомянутых систем.
Заявляемая комплексная система посадки летательных аппаратов содержит наземную аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» посадочный радиолокатор, блок обработки информации, блок вычисления координат, наземный видеопреобразователь, индикатор диспетчера посадки, входящий в пульт диспетчера посадки, бортовую аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» пилотажно-навигационный блок, бортовой видеопреобразователь, индикатор пилота, входящий в пульт пилота, двустороннюю линию передачи данных с наземными и бортовыми приемниками, передатчиками и антенными системами, бортовые формирователи векторов текущих курсовой и глиссадной скоростей и наземный разделитель векторов курсовой и глиссадной скоростей, входы бортовых формирователей текущих курсовой и глиссадной скоростей подключены к первому дополнительному выходу пилотажно-навигационного блока, выходы бортовых формирователей векторов текущих курсовой и глиссадной скоростей подключены ко входам бортового передатчика и одновременно соответственно к первому и второму дополнительным входам бортового видеопреобразователя, выход наземного приемника через разделитель векторов курсовой и глиссадной скоростей подключен к первому и второму дополнительным входам наземного видеопреобразователя, содержащая также преобразователь параметров границ вертикальной и горизонтальной видимости, формирователи векторов скоростей ветра по курсу и глиссаде, бортовые формирователи векторов оптимальных курсовой и глиссадной скоростей, бортовой разделитель наземной информации, при этом выходы формирователей скоростей ветра по курсу и глиссаде соединены с первым дополнительным входом блока вычисления координат, второй дополнительный вход которого соединен с выходом преобразователя параметров границ вертикальной и горизонтальной видимости, выход бортового приемника двусторонней линии передачи соединен со входом бортового разделителя наземной информации, бортовые формирователи оптимальных курсовой и глиссадных скоростей, вторые входы которых соединены со вторым дополнительным выходом пилотажно-навигационного блока, а выходы которых соединены соответственно с третьим и четвертым дополнительными входами бортового видеопреобразователя и дополнительными входами бортового передатчика, а также содержащая узел сопряжения информации, радиолокатор обзора летного поля, формирователь карты летного поля, базу данных аэропорта, наземную базу данных рельефа, наземный формирователь проекции рельефа по курсу и глиссаде, бортовую базу данных рельефа и бортовой формирователь проекций рельефа по курсу и глиссаде, пульт пилота и пульт диспетчера, выполненные соответственно с наземным и бортовым переключателями масштабов, при этом выход блока вычисления координат соединен с первым входом узла сопряжения информации, соединенного выходом с входом наземного передатчика, выход радиолокатора обзора летного поля соединен с входом формирователя карты летного поля, выход которого соединен с первым базовым входом наземного видеопреобразователя и с вторым входом узла сопряжения информации, выход базы данных аэропорта соединен с вторым базовым входом наземного видеопреобразователя и с третьим входом узла сопряжения информации, выход наземной базы данных рельефа соединен с первым входом наземного формирователя проекций рельефа по курсу и глиссаде, второй вход которого соединен с выходом блока вычисления координат, а выход которого соединен с третьим базовым входом наземного видеопреобразователя, выход бортовой базы данных рельефа соединен с первым входом бортового формирователя проекций рельефа по курсу и глиссаде, выход которого соединен с базовым входом бортового видеопреобразователя, выходы наземного и бортового переключателей соединены соответственно с управляемыми входами индикаторов диспетчера посадки и пилота, а выход бортового переключателя дополнительно подключен к масштабирующему входу бортового передатчика, при этом использована группировка навигационных спутников, введены бортовая антенна и приемовычислитель спутниковых сигналов, преобразователь формата сигналов, бортовой минимизатор ошибки и наземный минимизатор ошибки, при этом вход бортового приемовычислителя соединен с бортовой антенной, а его выход соединен с входом преобразователя формата сигналов, выход которого соединен с первым входом бортового минимизатора ошибки, второй вход которого соединен с выходом бортового разделителя наземной информации, первый выход бортового минимизатора ошибки соединен с минимизирующим входом пилотажно-навигационного блока, а его второй выход соединен с первыми входами бортовых формирователей оптимальных курсовой и глиссадной скоростей, при этом бортовой передатчик и наземный приемник двусторонней линии передачи данных выполнены соответственно с спутниковым входом и спутниковым выходом, соединенными соответственно с выходом преобразователя формата сигналов и первым входом наземного минимизатора ошибки, второй вход которого соединен с выходом блока вычисления координат, а выход которого соединен с минимизирующим входом наземного видеопреобразователя.
Кроме того, предложен вариант КСП, в котором выход преобразователя формата сигналов дополнительно соединен с спутниковым входом бортового видеопреобразоватиеля, а выход бортового разделителя наземной информации дополнительно соединен с наземным входом бортового видеопреобразователя, при этом выход наземного приемника дополнительно соединен с бортовым входом наземного видеогенератора.
Предлагается также способ захода на посадку ЛА, основанный на использовании КСП заявляемого типа, в котором на курсоглиссадных индикаторах диспетчера посадки и пилота использованы идентичные развертки с отображением отметок текущих координат летательного аппарата по курсу и глиссаде, а также отображений линий курса и линий глиссады, при этом в качестве отметок текущих координат летательного аппарата используют координаты, определяемые с учетом различных способов определения координат, и одновременно отображают отметки координат, определяемые каждым из используемых способов, выделяя их отображения, например, геометрической конфигурацией.
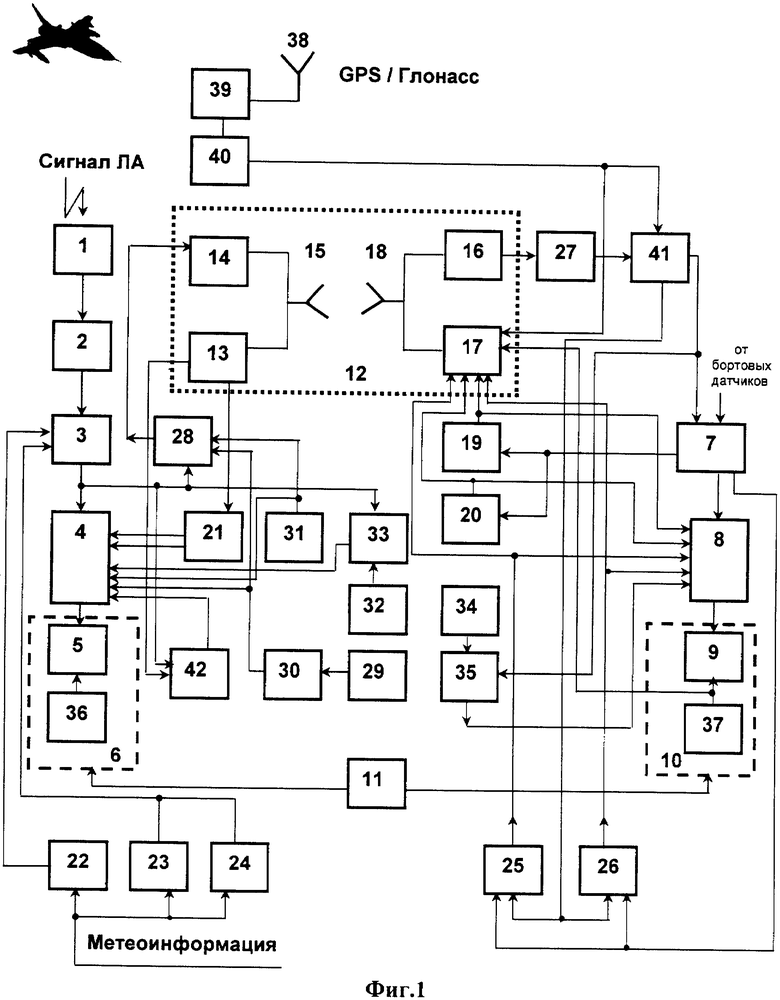
Работа заявляемого КСП поясняется с помощью блок-схем на фиг.1, 2 и курсо-глиссадных отображений на фиг.3-а и 3-б.
Блок-схема на фиг.1 содержит наземную аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» посадочный радиолокатор (ПРЛ)1, блок обработки информации 2, блок вычисления координат (БВК)3, наземный видеопреобразователь (НВП)4, индикатор диспетчера посадки 5, входящий в пульт диспетчера посадки 6, бортовую аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» пилотажно-навигационный блок (ПНБ)7, бортовой видеопреобразователь (БВП)8, индикатор пилота 9, входящий в пульт пилота 10, двустороннюю линию передачи данных (ДЛПД) 12 с наземными и бортовыми приемниками 13, 16, передатчиками 14, 17 и антенными системами 15, 18, бортовые формирователи векторов текущих курсовой 19 и глиссадной 20 скоростей и наземный разделитель векторов курсовой и глиссадной скоростей 21, входы бортовых формирователей текущих курсовой и глиссадной скоростей подключены к первому дополнительному выходу пилотажно-навигационного блока 7, выходы бортовых формирователей векторов текущих курсовой и глиссадной скоростей 19, 20 подключены к входам бортового передатчика 17 и одновременно соответственно к первому и второму дополнительным входам бортового видеопреобразователя 8, выход наземного приемника через разделитель векторов курсовой и глиссадной скоростей 21 подключен к первому и второму дополнительным входам наземного видеопреобразователя 4.
КСП также содержит преобразователь параметров границ вертикальной и горизонтальной видимости 22, формирователи векторов скоростей ветра по курсу 23 и глиссаде 24, бортовые формирователи векторов оптимальных курсовой 25 и глиссадной 26 скоростей, бортовой разделитель наземной информации 27.
Выходы формирователей 23 и 24 соединены с первым дополнительным входом БВК 3, второй дополнительный вход которого соединен с выходом преобразователя 22, выход бортового приемника ДЛПД 12 соединен с входом бортового разделителя наземной информации 27, бортовые формирователи 25 и 26 соединены вторыми входами с вторым дополнительным выходом ПНБ 7, а выходы их соединены соответственно с третьим и четвертым дополнительными входами БВП 8 и дополнительными входами бортового передатчика 17.
В наземной аппаратуре также содержатся узел сопряжения информации (УСИ) 28, радиолокатор обзора летного поля (РОЛП) 29, формирователь карты летного поля (ФКЛП) 30, база данных аэропорта (БДА) 31, наземная база данных рельефа (НБДР) 32, наземный формирователь проекции рельефа по курсу и глиссаде (НФПР) 33, в бортовой аппаратуре дополнительно содержатся бортовая база данных рельефа (ББДР) 34 и бортовой формирователь проекций рельефа (БФПР) 35 по курсу и глиссаде, а пульт пилота 9 и пульт диспетчера 5 выполнены соответственно с наземным 36 и бортовым 37 переключателями масштабов, при этом выход БВК 3 соединен с первым входом УСИ 28, соединенного выходом с входом наземного передатчика 14, выход РОЛП 29 соединен с входом ФКЛП 30, выход которого соединен с первым базовым входом НВП 4 и с вторым входом УСИ 28, выход БДА 31 соединен с вторым базовым входом НВП 4 и с третьим входом УСИ 28, выход НБДР 32 соединен с первым входом НФПР 33, второй вход которого соединен с выходом БВК 3, а выход которого соединен с третьим базовым входом НВП 4, выход ББДР 34 соединен с первым входом БФПР 35, а выход упомянутого бортового формирователя 34 соединен с базовым входом БВП 8, выходы наземного 36 и бортового 37 переключателей соединены соответственно с управляемыми входами индикаторов диспетчера посадки 5 и пилота 9, а выход бортового переключателя 37 дополнительно подключен к масштабирующему входу бортового передатчика 17.
Использована группировка навигационных спутников (GPS, Глонасс), введены бортовая антенна 38 и бортовой приемовычислитель спутниковых сигналов (ПВ) 39, преобразователь формата сигналов 40, бортовой минимизатор ошибки (БМО 41) и наземный минимизатор ошибки (НМО) 42. Вход приемовычислителя 39 соединен с антенной 38, а его выход соединен с входом преобразователя формата сигналов 40, выход которого соединен с первым входом БМО 41, второй вход которого соединен с выходом бортового разделителя наземной информации 27, первый выход БМО 41 соединен с минимизирующим входом ПНБ 7 и с вторым входом БФПР 35, а второй выход БМО 41 соединен с первыми входами бортовых формирователей оптимальных курсовой и глиссадной скоростей.
Бортовой передатчик 17 и наземный приемник 13 двусторонней линии передачи данных 12 выполнены соответственно с спутниковым входом и спутниковым выходом, соединенными соответственно с выходом преобразователя формата сигналов 40 и первым входом наземного минимизатора ошибки 42, второй вход которого соединен с выходом блока вычисления координат 3, а выход которого соединен с минимизирующим входом наземного видеопреобразователя 4.
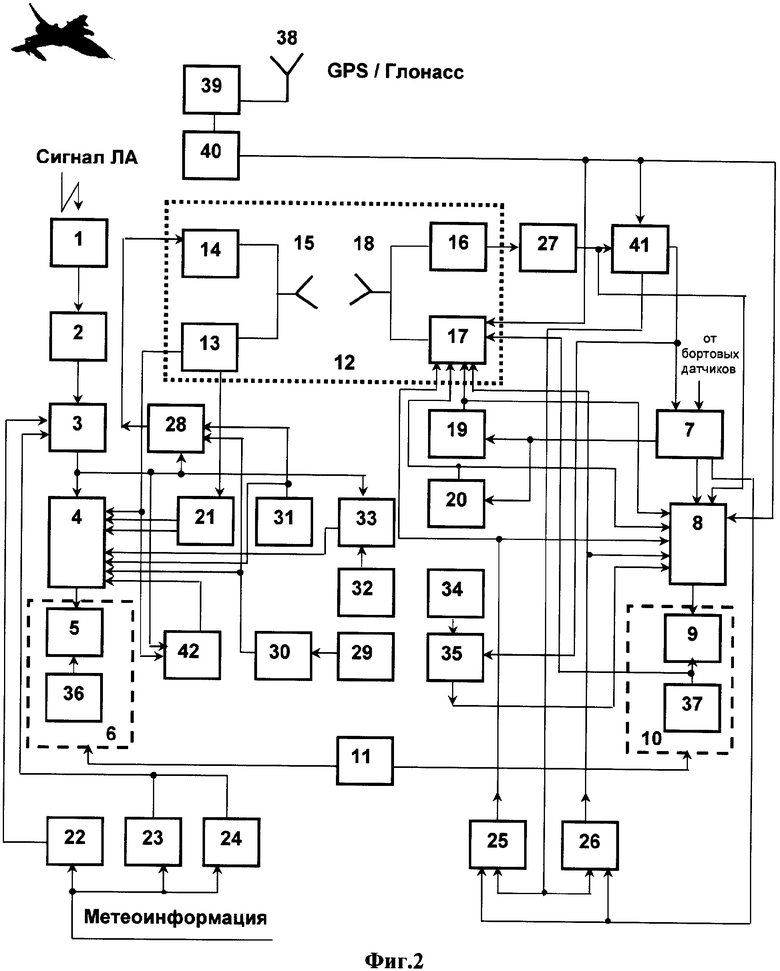
На фиг.2 показаны также дополнительные структурные связи, которые могут использоваться в одном из вариантов КСП: выход преобразователя формата сигналов 40 дополнительно соединен с спутниковым входом бортового видеопреобразоватиеля 8, а выход бортового разделителя наземной информации 27 дополнительно соединен с наземным входом бортового видеопреобразователя 8, при этом выход наземного приемника 13 дополнительно соединен с бортовым входом наземного видеогенератора 4.
Описанный выше КСП работает следующим образом.
Блоки 1-37 выполняют функции, совпадающие с функциями одноименных блоков в КСП-прототипе [7], позволяя принимать, обрабатывать и отображать сигналы посадочного радиолокатора с помощью наземной и бортовой аппаратуры. Вновь введенные узлы и блоки 38-42 позволяют принимать и в дальнейшем использовать в наземной и бортовой аппаратуре группировку искусственных спутников, причем возможно одновременное использование радиолокационных и спутниковых систем.
Аналогично прототипу принятый ПРЛ 1 сигнал ЛА поступает в блок обработки 2, а затем в БВК 3, где определяются координаты ЛА, далее в НВП 4 формируются сигналы, создающие картину отображения, воспроизводимую в индикаторе диспетчера посадки 5 в пульте диспетчера 6.
Одновременно, сформированная в БВК 3 информация передается через ДЛПД 12 на борт. Сформированные бортовыми формирователями 19 и 20 сигналы передаются через ДЛПД 12 в наземную аппаратуру и через наземный разделитель 21 и НВП 4 поступают в виде изображения на индикатор 5.
Блоки 7, 8, 9, 10 выполняют функции, позволяющие сформировать картину отображения информации для пилота, также описаны в прототипе [7].
Спутниковые сигналы систем GPS/Глонасс принимаются бортовой антенной 38 и обрабатываются бортовым приемовычислителем 39.
Далее выходные сигналы блока 39 поступают в преобразователь формата сигналов 40, где формат обработанных спутниковых сигналов преобразуется к формату обработанных сигналов ПРЛ 1, транслируемых на борт с помощью ДЛПД 12, т.е. к формату выходных сигналов ДЛПД 12.
На борту выходной сигнал ДЛПД 12 через разделитель наземной информации 27 поступает на второй вход БМО 41, на первый вход которого поступает выходной сигнал преобразователя формата сигналов 40.
В БМО 41 содержится информация о координатах ЛА, полученная как с помощью ПРЛ, так и путем приема спутниковых сигналов.
Методами традиционной статистической теории решений [8] в БМО 41 определяются значения координат ЛА с минимизированным значением ошибки, которые далее поступают с первого выхода БМО 41 на минимизированный вход ПНБ 7 и второй вход БФПР 35, а со второго выхода - на первые входы бортовых формирователей векторов оптимальных курсовой и глиссадной скоростей 25 и 26.
Сигнал с выхода преобразователя формата сигналов 40 поступает также на спутниковый вход передатчика 17, а со спутникового выхода приемника 13 на первый вход НМО 42, на второй вход которого поступает сигнал с выхода БВК 3.
В НМО 42 производится, аналогично БМО 41, статистическая обработка значений координат ЛА, полученных радиолокационным способом и с помощью спутниковой технологии.
С выхода НМО 42 сигнал поступает на минимизирующий вход НВП 4.
Видеопреобразование и отображение значений координат ЛА производятся аналогично устройствам - аналогам [3, 4] и прототипу [7].
Таким образом, совместное использование и обработка радиолокационного и спутникового способа определения координат ЛА позволяет построить комплексную систему посадки ЛА, определяющую как наиболее надежно, так и наиболее точно значения координат ЛА и, следовательно, позволяющую повысить безопасность полетов.
На фиг.2 представлен вариант КСП с повышенной надежностью, в котором на индикаторах диспетчера посадки и пилота отображаются три отметки ЛА:
- с координатами, полученными только радиолокационным путем,
- с координатами, полученными только с помощью спутников,
- с координатами, полученными способом, объединяющим оба варианта.
Это достигается путем дополнительных схемных связей (см. фиг.2), обеспечивающих выведение сигнала с выхода преобразователя формата сигналов 40 на спутниковый вход БВП 8, сигнала с выхода разделителя наземной информации - на наземный вход БВП 8, а в наземной части КСП - выведение сигнала с выхода приемника 13 дополнительно на бортовой вход наземного видеогенератора 4.
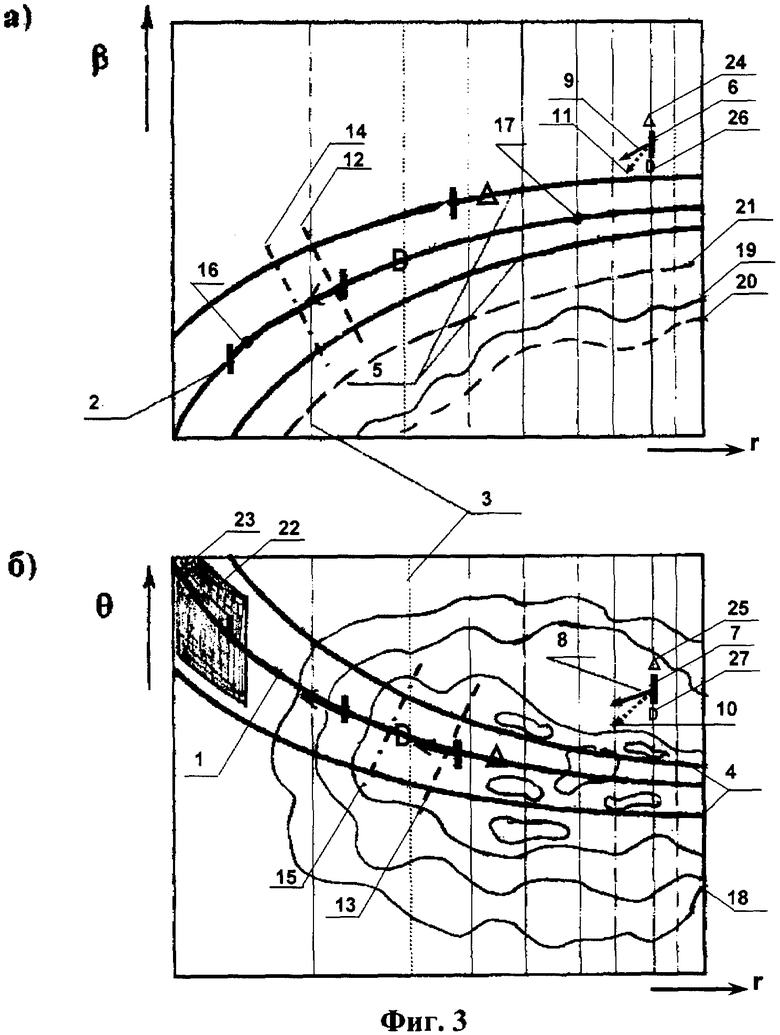
На фиг.3 показаны картины отображения линии глиссады (фиг.3-а) и линии курса (фиг.3-б) ЛА, аналогичные прототипу [7].
При этом сохранены обозначения рассматриваемых подробно в [3, 4, 7] картин отображения.
1. Линия курса.
2. Линия глиссады.
3. Метки дальности.
4. Линии равных отклонений от курса.
5. Линии равных отклонений от глиссады.
6, 7. Отметки ЛА.
8. Вектор текущей курсовой скорости.
9. Вектор текущей глиссадной скорости.
10. Вектор оптимальной курсовой скорости.
11. Вектор оптимальной глиссадной скорости.
12. Граница реальной вертикальной видимости.
13. Граница реальной горизонтальной видимости.
14. Граница допустимой вертикальной видимости.
15. Граница допустимой горизонтальной видимости.
16. Точка прицеливания.
17. Координата высоты принятия решения о посадке.
18. Линии проекций рельефа по курсу.
19, 20. Линии проекций рельефа по глиссаде.
21. Линия допустимого отклонения от глиссады.
22. Взлетно-посадочная полоса (ВПП).
23. Точка приземления.
В соответствии с предлагаемым способом для отображения текущих координат ЛА использованы координаты, определяемые с учетом различных способов определения координат (отметки 6 и 7), одновременно отображают отметки координат, вычисляемые каждым из используемых способов (отметки 24, 25 соответствуют определению координат радиолокационным способом, а отметки 26, 27 получены с помощью спутников).
Отметки выделяются геометрической конфигурацией или цветом.
В случае неработоспособности радиолокационного или спутникового канала на экранах индикаторов остается только одна отметка определенной конфигурации или цвета.
Таким образом, в заявляемом КСП осуществляются новые схемные связи, реализующие сочетание новых признаков с известными. Сформированная новая совокупность признаков осуществляется новыми структурными связями, что определяет новизну заявляемого КСП.
Одновременное отображение и использование координат ЛА, определяемых различными способами, составляет суть предложенного способа захода на посадку.
Промышленная полезность определяется в данном случае повышением безопасности полетов ЛА.
Промышленная реализация КСП осуществлена аналогично прототипу на основе серийно-выпускаемых изделий.
Испытания, подтверждающие эффективность предложенного КСП и способа для повышения вероятности безаварийной работы, проводились с использованием самолета СУ-27.
Заявляемый КСП будет использован при осуществлении посадки ЛА по высшей категории безопасности.
Источники информации, принятые во внимание
1. Авиационная радионавигация. Справочник под ред. А.А.Сосновского. М., «Транспорт», 1990, стр.151.
2. Заявка Франции 2752051, МПК 7 G01С 23/00, заявл. 2.8.96; опубл. 6.2.98.
3. Патент РФ 2200961, МПК 7 G01S 1/00, заявл. 14.04.2000; опубл. 20.03.03, Бюл. №8. МПК 7 G01С 23/00, заявл. 14.07.2000; опубл. 20.03,03 Бюл. №8.
4. Патент РФ 2239203; МПК 7 G01С 23/00; заявл. 02.04.2003, опубл. 27.10.04, Бюл. №10.
5. Патент США 6239745, МПК 7 G01S 1/16; заявл. 30.07.1999, опубл. 29.05.2001.
6. Патент РФ 223984, МПК 7 G01S 13/91, заявл. 15.07.2002, опубл. 10.11.2004.
7. Патент РФ 2273590, МПК 7 G01С 23/00, заявл. 16.11.2004, опубл. 10.04.2006. Бюл. №10
8. О.А.Бабич. Обработка информации в навигационных комплексах. Москва, «Машиностроение», 1991 г.
Расшифровка обозначений к фиг.1 и 2.
1. Посадочный радиолокатор (ПРЛ).
2. Блок обработки информации.
3. Блок вычисления координат (БВК).
4. Наземный видеопреобразователь (НВП).
5. Индикатор диспетчера посадки.
6. Пульт диспетчера посадки.
7. Пилотажно-навигационный блок (ПНБ).
8. Бортовой видеопреобразователь (БВП).
9. Индикатор пилота.
10. Пульт пилота.
11. Линия радиосвязи.
12. Двусторонняя линия передачи данных (ДЛПД).
13. Наземный приемник.
14. Наземный передатчик.
15. Наземная антенная система.
16. Бортовой приемник.
17. Бортовой передатчик.
18. Бортовая антенная система.
19. Бортовой формирователь вектора текущей курсовой скорости.
20. Бортовой формирователь вектора текущей глиссадной скорости.
21. Наземный разделитель векторов курсовой и глиссадной скоростей.
22. Преобразователь параметров границ вертикальной и горизонтальной видимостей.
23. Формирователь вектора скорости ветра по курсу.
24. Формирователь вектора скорости ветра по глиссаде.
25. Бортовой формирователь вектора оптимальной курсовой скорости.
26. Бортовой формирователь вектора оптимальной глиссадной скорости.
27. Бортовой разделитель наземной информации.
28. Узел сопряжения информации.
29. Радиолокатор обзора летного поля.
30. Формирователь карты летного поля.
31. База данных аэропорта.
32. Наземная база данных рельефа.
33. Наземный формирователь проекций рельефа по курсу и глиссаде (НФПР).
34. Бортовая база данных рельефа.
35. Бортовой формирователь проекций рельефа по курсу и глиссаде (БФПР).
36. Наземный переключатель масштабов.
37. Бортовой переключатель масштабов.
38. Бортовая антенна спутниковых сигналов.
39. Бортовой приемовычислитель спутниковых сигналов.
40. Преобразователь формата сигналов.
41. Бортовой минимизатор ошибки (БМО).
42. Наземный минимизатор ошибки (НМО).
Расшифровка обозначений к фиг.3-а и 3-б.
1. Линия курса.
2. Линия глиссады.
3. Метки дальности.
4. Линии равных отклонений от курса.
5. Линии равных отклонений от глиссады.
6, 7. Отметки ЛА.
8. Вектор текущей курсовой скорости.
9. Вектор текущей глиссадной скорости.
10. Вектор оптимальной курсовой скорости.
11. Вектор оптимальной глиссадной скорости.
12. Граница реальной вертикальной видимости.
13. Граница реальной горизонтальной видимости.
14. Граница допустимой вертикальной видимости.
15. Граница допустимой горизонтальной видимости.
16. Точка прицеливания.
17. Координата высоты принятия решения о посадке.
18. Линии проекций рельефа по курсу.
19, 20. Линии проекций рельефа по глиссаде.
21. Линия допустимого отклонения от глиссады.
22. Взлетно-посадочная полоса (ВПП).
23. Точка приземления.
24, 25. Отметки ЛА по радиолокационному способу.
26, 27. Отметки ЛА с помощью спутников.
Изобретение относится к радиолокационным системам посадки летательных аппаратов (ЛА) и может быть использовано в системах управления воздушным движением. Система посадки летательных аппаратов (ЛА) состоит из посадочного радиолокатора для определения координат ЛА и формирования идентичных отображений на индикаторах диспетчера посадки и пилота с отображением отметок текущих координат ЛА, а также линий курса и линий глиссады, рельефа местности и карты летного поля. Дополнительно вводится канал, использующий группировку навигационных спутников, состоящий из последовательно соединенных бортовой антенны, приемовычислителя спутниковых сигналов и бортового минимизатора ошибки, второй вход которого соединен с выходом бортового разделителя наземной информации, а выход соединен с минимизирующим входом пилотажно-навигационного блока. Предусмотрена возможность независимо отображать на индикаторах диспетчера и пилота данные, сформированные с помощью радиолокатора и группировки спутников. Предлагается также способ захода на посадку ЛА, основанный на использовании системы заявляемого типа, в котором в качестве отметок текущих координат летательного аппарата используют координаты, определяемые с учетом различных способов определения координат, и одновременно отображают отметки координат, определяемые каждым из используемых способов, выделяя их отображения, например, геометрической конфигурацией. Технический результат - повышение безопасности полетов при заходе на посадку и ее осуществлении благодаря одновременному использованию радиолокационного и спутникового способов определения координат ЛА. 2 н. и 1 з.п. ф-лы, 3 ил.
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2003 |
|
RU2239203C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2002 |
|
RU2239845C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ИНГАЛЯЦИОННЫХ ПРОЦЕДУР У СЕЛЬСКОХОЗЯЙСТВЕННЫХ ЖИВОТНЫХ | 2020 |
|
RU2752051C1 |
| US 6239745 B1, 29.05.2001. | |||

