Известны полуавтоматы для динамической настройки центробежных регуляторов, содержащие приводной синхр01П1ый двигатель, связанный через редуктор с вращающимся механизмом разворота регулировочных винтов и центробежным регулятором.
Предлагаемый полуавтомат для настройки центробежных регуляторов отличается тем, что в нем применен серводвигатель, цепь питания которого коммутируется контактами поляризованного реле, включенного на выходе релейного усилителя, а на вход последнего поступает сигнал с диагонали питаемого постоянным током моста сопротивлений, в одно из нлеч которого через контактные кольца включены контакты настраиваемого центробежного регулятора, что нозволяет упростить динамическую балансировку двигателей за счет предварительной настройки регуляторов. Кроме того, в нолуавтомате, с целью автоматической настройки центробежного регулятора независимо от двигателя, ротор серводвигателя сочлеиен с вращающимся валом приводного синхронного двигателя и настраиваемым центробежным регулятором, а статор серводвигателя через редуктор с конической шестерней связан с регулировочными винтами иастраиваемого регулятора.
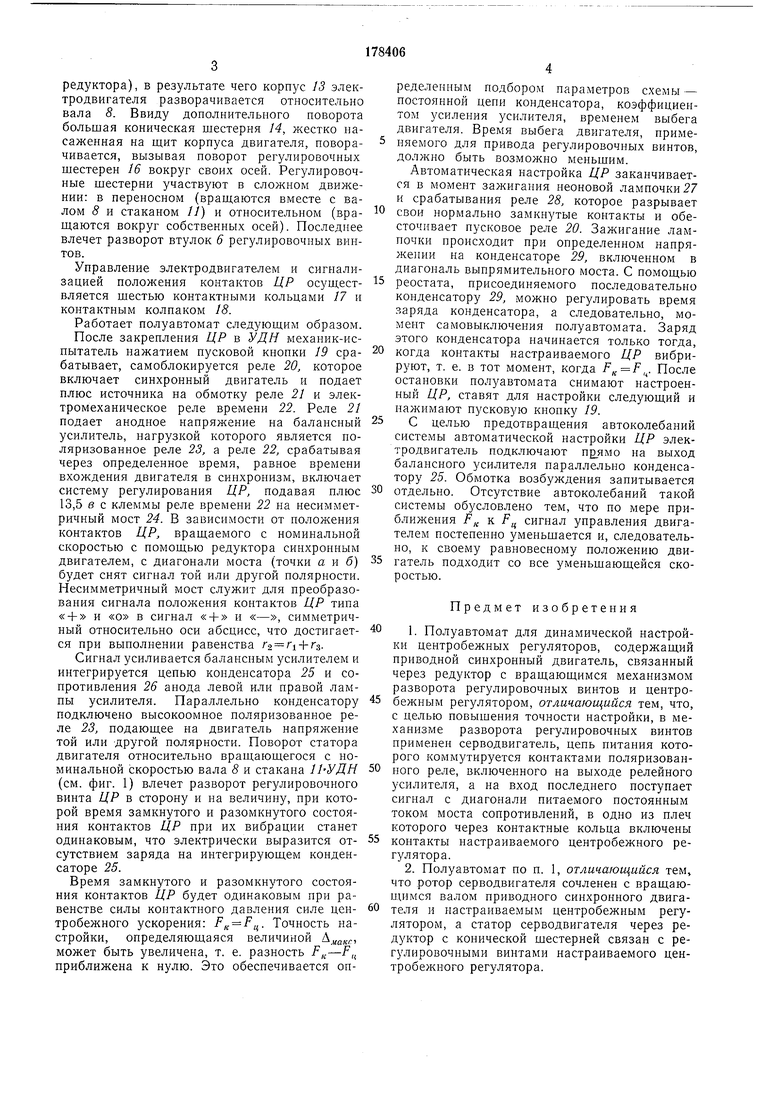
ного регулятора; на фиг. 2 - его электрическая схема.
Центробежный регулятор (ЦР}, подлел ащий настройке, насаживается на вал 2 устройства дннамической настройки (УДН) и закрепляется на нем гайкой 3. В регулировочный винт 4 вставляется штифт 5, с помощью которого вращение от втулки 6 передается регулировочно у винту центробежного регулятора. Отвернув винт 7 и совместив нрорез втулки 6 со штифтом 5, закрепляют. Второй регулнровочный винт ЦР со втулкой не соединен, а соответствующие ему контакты ЦР изолнрованы между собой прокладкой. Синхронный привод раскручивает выходной вал 8 редуктора 9 электродвигателя 10 и стакан 1 с иомощью звездочки 12. Так как в УДН применеи электродвигатель с редуктором, имеюшим большое передаточное отиошение (1000-1500), скорость корпуса 13 электродвигате.тя такая же, как и звездочки 12. Таким образом, звездочка, вал редуктора, корпус 13 электродвигателя, стакан, большая коническая шестерпя 14, вал УДИ и
5 настраиваемый ЦР будут иметь одинаковую скорость, равную номинальной.
При автоматическом включении электродвигателя якорь заставляет шестерни редуктора 9 обкатываться вокруг относительно ненодвижной тестер 15 (выходная шестерня
редуктора), в результате чего корпус 13 электродвигателя разворачивается относительно вала 8. Ввиду дополнительного поворота большая коническая и1естерня 14, жестко насаженная на нднт корпуса двигателя, поворачивается, вызывая поворот регулировочных шестерен 16 вокруг своих осей. Регулировочные шестерни участвуют в сложном движении: в переносном (вращаются вместе с валом 8 и стаканом 11) и относительном (враш,аются вокруг собственных осей). Последнее влечет разворот втулок 6 регулировочных винтов.
Управление электродвигателем и сигнализацией положения контактов ЦР осуществляется шестью контактными кольцами 17 и контактным колпаком 18.
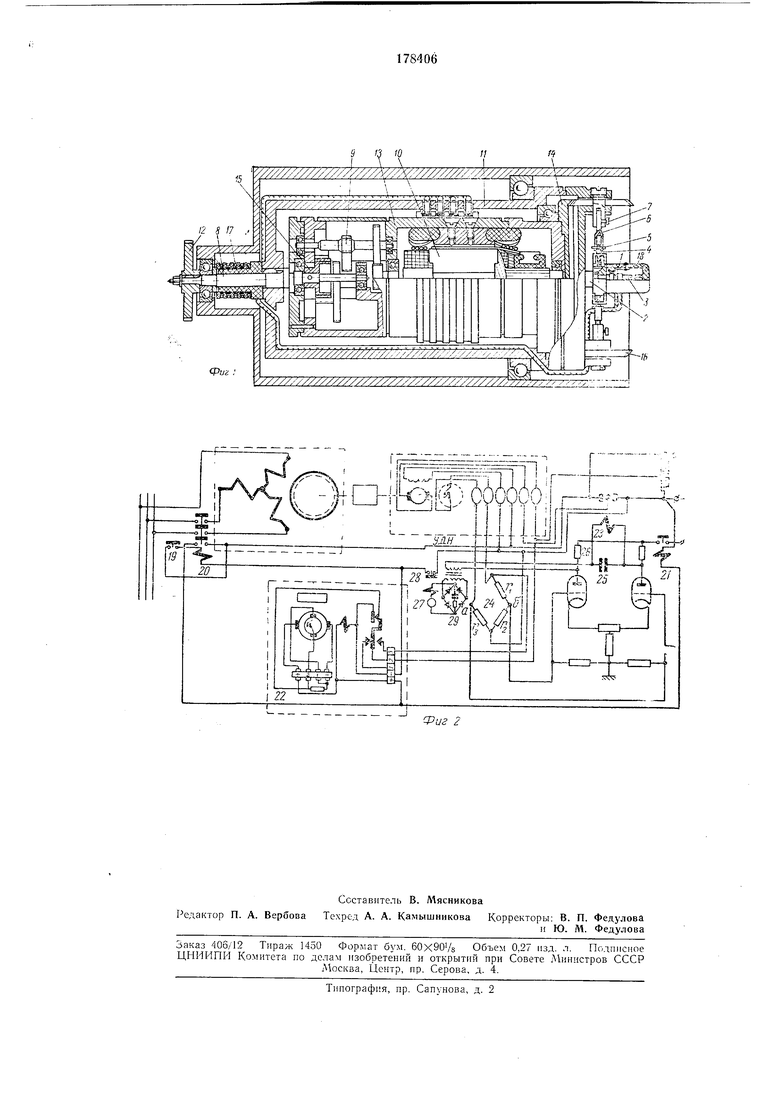
Работает полуавтомат следующим образом.
После закрепления ЦР в УДН механик-испытатель нажатием пусковой кнопки 19 срабатывает, самоблокируется реле 20, которое включает синхронный двигатель и подает плюс источника па обмотку реле 21 и электромеханическое реле времени 22. Реле 21 подает анодное напряжение на балансный усилитель, нагрузкой которого является ноляризованное реле 23, а реле 22, срабатывая через определенное время, равное времени вхождения двигателя в синхронизм, включает систему регулирования ЦР, подавая плюс 13,5 в с клеммы реле времени 22 на несимметричный мост 24. В зависимости от положения контактов ЦР, вращаемого с номинальной скоростью с помощью редуктора синхронным двигателем, с диагонали моста (точки а и б) будет снят сигнал той или другой полярности. Несимметричный мост служит для преобразования сигнала положения контактов ЦР типа «-f и «о в сигнал «-f и «-, симметричный относительно оси абсцисс, что достигается при выполнении равенства /9 Г1 + Гз.
Сигнал усиливается балансным усилителем и интегрируется цепью конденсатора 25 и сопротивления 26 анода левой или правой лампы усилителя. Параллельно конденсатору подключено высокоомное поляризованное реле 23, подающее на двигатель напряжение той или другой полярности. Поворот статора двигателя относительно вращающегося с номинальной скоростью вала 8 и стакана П-УДН (см. фиг. 1) влечет разворот регулировочного винта ЦР в сторону и на величину, при которой время замкнутого и разомкнутого состояния контактов й,Р при их вибрации станет одинаковым, что электрически выразится отсутствием заряда на интегрирующем конденсаторе 25.
Время замкнутого и разомкнутого состояния контактов ЦР будет одинаковым при равенстве силы контактного давления силе центробежного ускорения: F F. Точность настройки, определяющаяся величиной А,„акг1 может быть увеличена, т. е. разность , приближена к нулю. Это обеспечивается определенным подбором параметров схемы - постоянной цепи конденсатора, коэффициентом усиления усилителя, временем выбега двигателя. Время выбега двигателя, нримепяемого для привода регулировочных винтов, должно быть возможно меньщим.
Автоматическая настройка ЦР заканчивается в момент зажигания неоновой лампочки 27 и срабатывания реле 28, которое разрывает
свои нормально замкнутые контакты и обесточивает нусковое реле 20. Зажигание лампочки происходит при определенном напряже 1ии на конденсаторе 29, включенном в диагональ выпрямительного моста. С помощью
реостата, присоединяемого последовательно конденсатору 29, можно регулировать время заряда конденсатора, а следовательно, момент самовыключения полуавтомата. Заряд этого конденсатора начинается только тогда,
когда контакты настраиваемого ЦР вибрируют, т. е. в тот момент, когда ,. После остановки полуавтомата снимают настроенный ЦР, ставят для настройки следующий и нажимают пусковую кнопку 19.
С целью предотвращения автоколебаний системы автоматической настройки ЦР электродвигатель подключают на выход балансного усилителя параллельно конденсатору 25. Обмотка возбуждения запитывается
отдельно. Отсутствие автоколебаний такой системы обусловлено тем, что по мере приближения F If к F сигнал управления двигателем постепенно уменьшается и, следовательно, к своему равновесному положению двигатель подходит со все уменьшающейся скоростью.
Предмет изобретения
1. Полуавтомат для динамической настройки центробежных регуляторов, содержащий приводной синхронный двигатель, связанный через редуктор с вращающимся механизмом разворота регулировочных винтов и центробежным регулятором, отличающийся тем, что, с целью повышения точности иастройки, в механизме разворота регулировочных винтов применен серводвигатель, цепь питания которого коммутируется контактами поляризованного реле, включенного на выходе релейного усилителя, а на вход последнего поступает сигнал с диагонали питаемого постоянным током моста сопротивлений, в одно из плеч которого через контактные кольца включены
контакты настраиваемого центробежного регулятора.
2. Полуавтомат по п. 1, отличающийся тем, что ротор серводвигателя сочленен с вращающимся валом приводного синхронного двигателя и настраиваемым центробежным регулятором, а статор серводвигателя через редуктор с конической шестерней связан с регулировочными винтами настраиваемого центробежного регулятора. 9 .. tt Ю .
Фиг г
