Известные приводн( механизмы, применяемые в астрономии для ведения телескопа, не обеспечивают балансировки его подвижных частей, в частности трубы телескопа. Процесс балансировки этих частей обычно требует расцепления точных червячных пар или отсоединения червячных шестерен от ведомых осей и приведения центра тяжести к оси враш,ения либо иеремещением подвижных балансировочных грузов, либо сменными грузами.
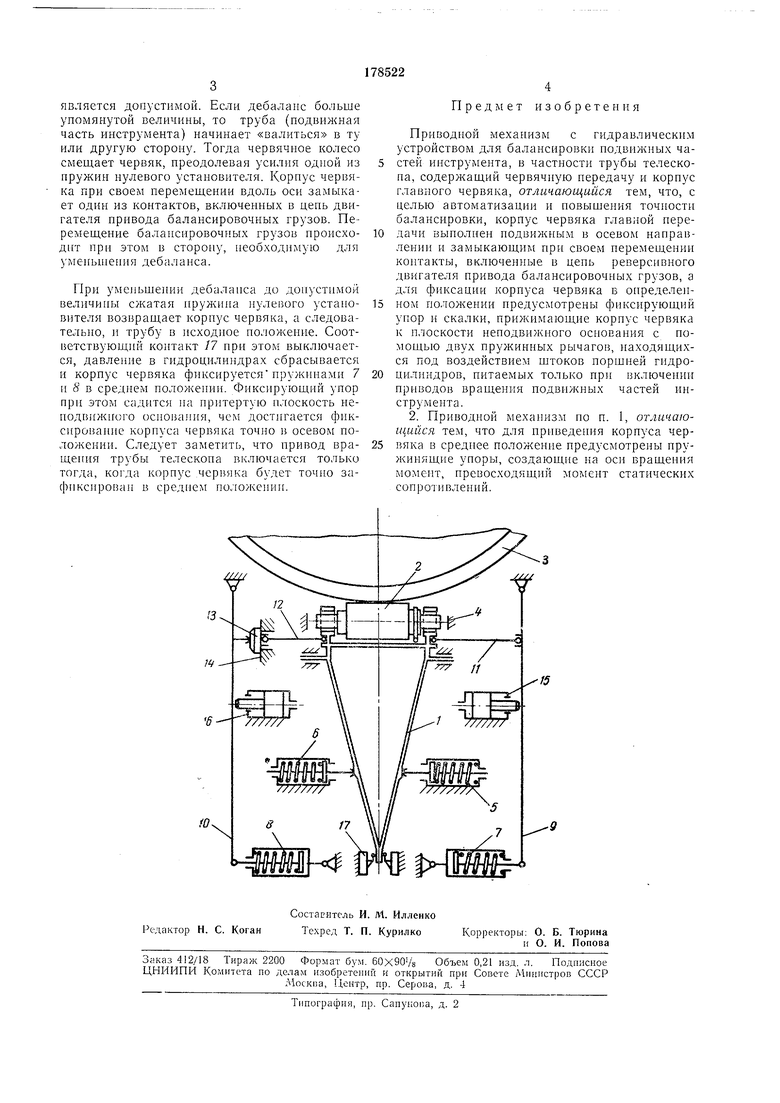
Для автоматизации и повышения точности балансировки в предложенном механизме корпус червяка главной передачи выполнен подвижным в осевом направлении. При своем перемещении он замыкает контакты, включенные в цепь реверсивного двигателя привода балаисировочиых грузов. Для фиксации корпуса червяка в оиределенном положении предусмотрены фиксирующий упор и скалки, прижимающие корпус червяка к плоскости неподвижного основания с помощью двух пружинных рычагов. Кроме того, для приведения корпуса червяка в среднее положение предусмотрены пружинящие упоры, создающие на оси вращения момент, превосходящий момент статических сопротивлений.
(после раскренления), под воздействием иедопустимого дебаланса может перемещаться вдоль оси. Величина этого перемещения ограничивается упорами 4. Пружины 5 и 6, минимальны-е усилия которых подобраны таки.ми, что они создают па оси вращающейся части момент, несколько превосходящий момент статических сопротивлений, играют роль нулевого установителя, приводящего корпус
червяка в среднее положение. 7 и 8 через рычаги 9 и 10 прижимают с помощью скалок // и 12 и фиксирующего упора 13 корпус червяка к плоскосТ); иеподвижного основания 14. На неподвижном основании установлены два гидравлических цилиндра 15 п 16 и закреплеиы контакты 17, включенные в цеиь реверсивного двигателя привода балансировочных грузов по схеме «вперед - назад.
20
При включении прпводов вращения трубы (подвижных частей) в гидравлические цилиндры подается давление. Штоки гидроцилиндров разводят рычап; 9 и 10 и освобождают корпус червяка, который получает возможность свободно перемещаться в осевом направлении. Если дебаланс не превыщает момента всех сопротивлений перемещения трубы, то труба остается неподвижной и, следовательно, величина указанного дебаланса
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Монтировка телескопа | 1981 |
|
SU993192A1 |
| Монтировка телескопа (его варианты) | 1982 |
|
SU1067460A1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| УНИВЕРСАЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС ДЛЯ ТЕЛЕСКОПИЧЕСКОГО ПАТРОНА | 2018 |
|
RU2696949C2 |
| Притирочный станок для обработки винтовой пары | 1985 |
|
SU1252083A1 |
| ГИДРОМЕХАНИЧЕСКИЙ ГРЕЙФЕР | 1999 |
|
RU2165386C2 |
| ЭКВАТОРИАЛЬНАЯ УСТАНОВКА ТЕЛЕСКОПА-РЕФЛЕКТОРА | 1998 |
|
RU2142153C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Привод телескопа | 1962 |
|
SU152323A1 |
