Известны приводы телескопа с разветвляющими связанными . собой кинематическими ветвями для установочного и следящего движений, выполненными соответственно Б виде обратимой зубчатой передачи и червячной пары. Подобные приводы не обеспечивают требуемой топкости отсчета для крупных телескопов, у которых зелнк-л диналшческме 1 агрузки- при установочном движении.
Отличительная особенность описываемого привода телескопа состоит в том, что червяк ветви следящего дв ижения выполнен подзижным в осевом направлении, а в ветвь установочного движения включено устройство, содержащее рычаг и гидравлические упоры. Такая конструкция привода позволяет уменьшить кинематические ощибки при сохранении высокой иагрузочной способности. Кроме того, у предлагаемого привода, с целью надежного предохранения червячной пары от перегрузок, перемещение червяка в осевом направлении больще, чем перемещение рычага в ветви установочного движения.
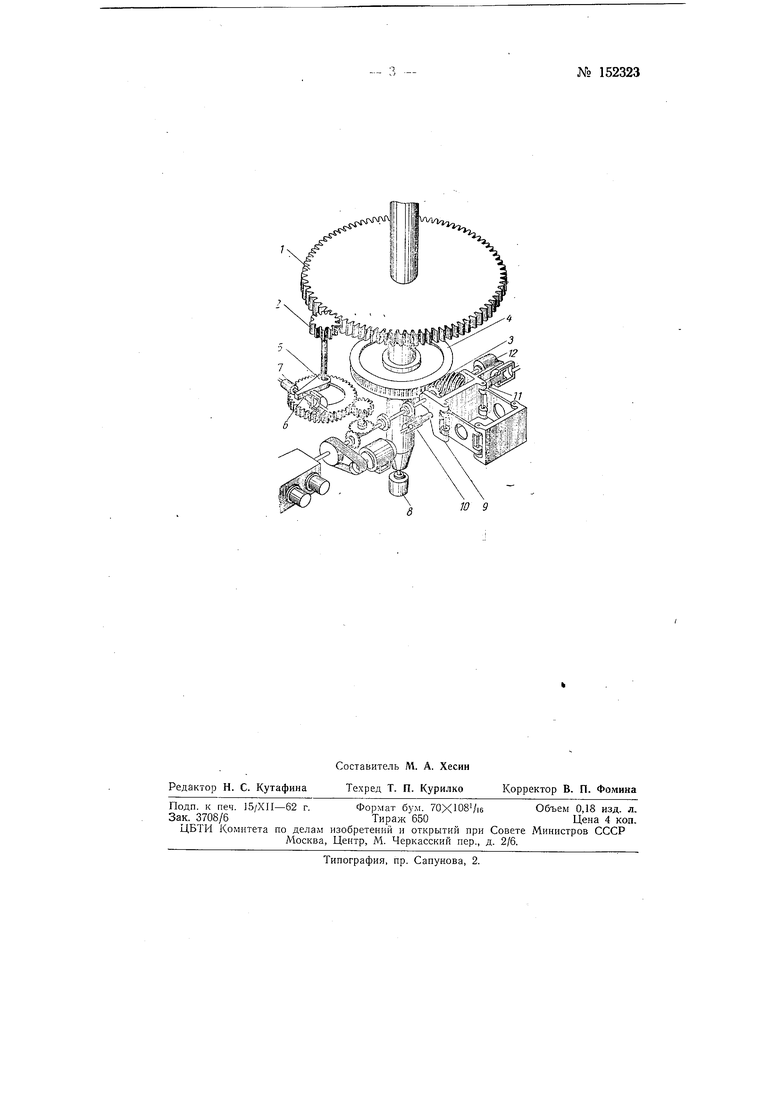
На чертеже схематически изображен описываемый привод телескопа.
Кинематическая ветвь установочного движения телескопа выполнена обратимой и состоит из ряда зубчатых колес (на чертеже не показаны) заканчивающегося щестернями / и 2. Ветвь следящего движения состоит из червячной пары 5 и 4. Передаточные отнощения обеих ветвей выполнены одинаково.
В ветвь становочного движения включено устройство, состоящее из рычага 5 и гидравлических упоров 5 и 7, которые при установочном движении фиксируют рычаг, обеспечивая включение ветви. Отсчет угла поворота при этом осуществляется датчиком S,установленным наиспел№ 152323 - 2 -
нительной оси. Во время следящего движения давление гидросмеси в упорах 6 н 7 снимается, что обеспечивает частичное расцепление ветви установочного движения. Корпус 9 червяка выполнен подвижным в осевом направлении. При работе ветви установочного движения червяк, перемещаясь, компенсирует кинематические погрешности привода.
Предохранение червячной пары от перегрузок обеспечивается тем,. что приведенный к оси телескопа свободный ход компенсирующего устройства ветви следящего движения выполнен ббльшим, чем перемещение рычага в ветви установочного движения. При следящем движении гидравлические порщневые упоры 10 и // фиксируют червяк в осевом направлении. Отсчет угла поворота в этом случае осуществляется посредством датчика 8 или датчиком 12, соединенным с червяком. Гидравлические упоры 6, 7, 10 и // одновременно выполняют роль предохранителей, воспринимающих удары и перегрузки в приводе.
Предлагаемый привод может найти применение в телескопостроении.
предмет изобретения
1.Привод телескопа с разветвляющими связанными между собой кинематическими ветвями для установочного и следящего движений, выполненными, соответственно в виде обратимой зубчатой передачи и червячной пары, отличающийся тем, что, с целью уменьшения кинематических ошибок привода при сохранении высокой нагрз зочной способности, червяк ветви следящего выполнен подвижным в осевом направлении, а в ветвь установочного движения включено устройство, содержащее рычаг и гидравлические упоры.
2.Привод телескопа по п. 1, отличающийся тем, что, с целью надежного предохранения червячной пары от перегрузок, приведенный к оси телескопа свободный ход компенсирующего устройства ветви следящего движения (перемещении червяка в осевом направлении) больше, чем перемещение рычага в ветви установочного движения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Привод телескопа | 1960 |
|
SU137283A1 |
| Привод телескопа | 1961 |
|
SU151842A1 |
| УСТРОЙСТВО для КОРРЕКТИРОВАНИЯ ПОГРЕШНОСТЕЙ ЧЕРВЯЧНОЙ ПАРЫ | 1966 |
|
SU179009A1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| УСТРОЙСТВО для САМОУСТАНОВКИ КОРПУСА ЧЕРВЯЧНОГО | 1972 |
|
SU358563A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| МЕХАНИЗМ РАДИАЛЬНОЙ ПОДАЧИ | 1973 |
|
SU375157A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА С УСТРОЙСТВОМ ДЛЯ УСТРАНЕНИЯ | 1967 |
|
SU191975A1 |
| Автомат для изготовления плетеной металлической сетки | 1971 |
|
SU444593A1 |