Изобретение относится к подъемно- транспортному машиностроению, а именно к устройствам для ограничения колебаний, груза, перемещаемого подъемно-транспортным средством, а также для точных перемещений груза на малые расстояния, например, при постановке груза на место.
Известна система стабилизации углового движения баллистической ракеты.
Известны системы управления нормальным и боковым движениями баллистической ракеты.
Известна система угловой стабилизации космического аппарата.
Вышеназванные системы используются для управления летательными аппаратами и не предусмотрены для использования в подъемно-транспортном оборудовании.
Наиболее близким к предлагаемому техническому решению (прототипом) является устройство, в котором управляющие воздействия прикладываются к тележке перемещения подъёмно-транспортного средства. Недостатком данного способа и устройства является значительная инерционность тележки и привода, которая снижает эффективность (т.е. устойчивость и точность) стабилизации груза.
Сущность изобретения заключается в том. что груз подвешен не на одном, а на четырех канатах, соединенных вместе в точке крепления груза, причем канаты попарно образуют две взаимно перпендикулярные вертикальные плоскости. При отсутствии разности сил натяжения канатов, лежащих в одной ПЛОСКОСТИ Рна Рнв 0(фИГ.1), СПрЭт
ведливо выражение
Рна + Рнв+Р 0.(1)
где Рна - сила натяжения каната За;
Рнв - сила натяжения каната Зв;
Р-вес груза;
О - точка крепления груза.
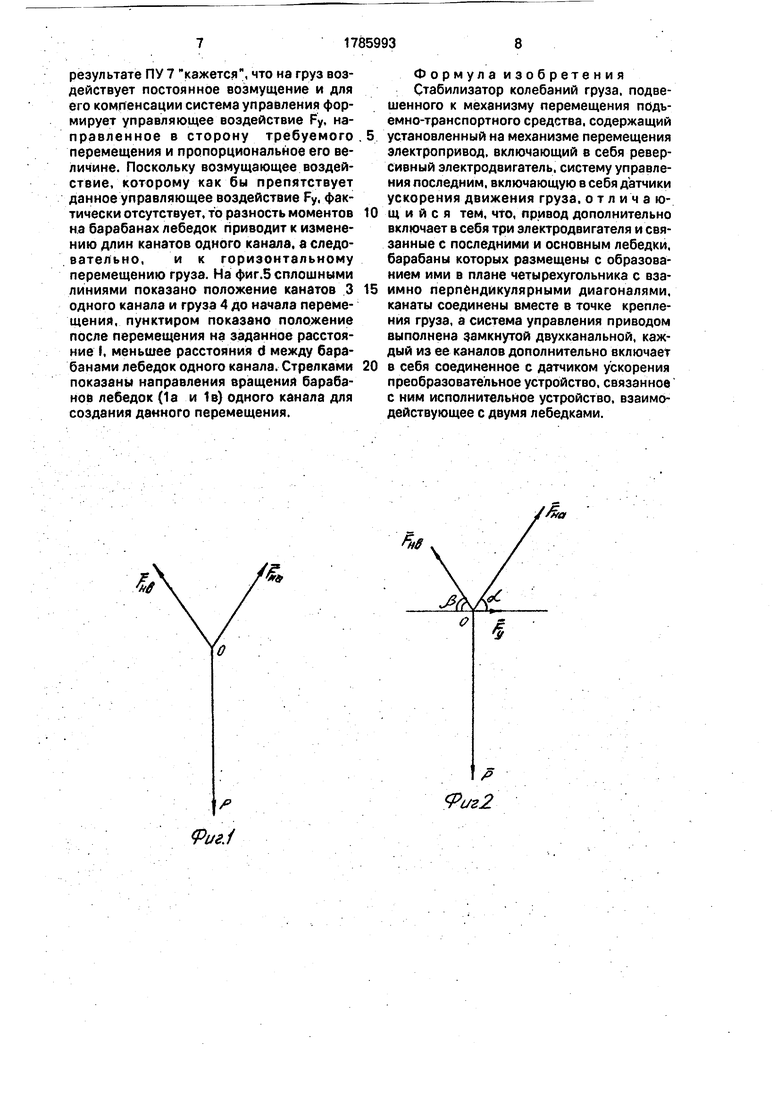
Причем канаты За и Зв лежат в одной вертикальной плоскости. При появлении разности сил натяжения канатов одной вертикальной ПЛОСКОСТИ / Рна / / РКП/ & О (фиг.2), возникает горизонтальная составляющая сил Ру, определяемая из выражения
Риа + Рнв + Р Ру ,. (2)
fe
Ч|
09
О
ЧХ
Ч
СО
где Fy - горизонтальная составляющая сил, которая используется как управляющее воздействие (управляющая сила):
а ,/ -углы отклонения канатов от горизонтальной плоскости.
Для того, чтобы канаты образовывали две вертикальные взаимно перпендикулярные плоскости, барабаны лебедок, на которые намотаны канаты, размещены с образованием ими в плане четырехугольника с взаимно перпендикулярными диагоналями. Барабаны каждой из четырех лебедок приводятся в движение отдельными электродвигателями.
Для управления электроприводом используется система управления, включающая в себя датчик ускорения движения груза, имеющая возможность создавать разность сил натяжения канатов в одной вертикальной плоскости, для чего система управления выполнена в виде замкнутой двухканальной системы автоматического управления, каждый из каналов которой управляет электродвигателями двух лебедок, барабаны которых расположены так, что намотанные на них канаты лежат в одной вертикальной плоскости, т.е. в плане они образуют одну из диагоналей четырехугольника с взаимно перпендикулярными диагоналями.
Датчики ускорения движения груза предназначены для измерения линейных возмущений в горизонтальной плоскости, воздействующих на груз, являющийся объектом управления. Датчики могут быть как непосредственного типа (например, акселерометры), так и косвенного типа (например, воздействующие на груз возмущения высчитываются через разность сил натяжения канатов). Можно использовать также .оптические или индукционные датчики, позволяющие производить измерения параметров движения груза дистанционно. Принцип действия и конструкция датчиков ускорения движения груза могут быть любыми и не являются существенными, возможно конструктивное объединение датчиков, действующих по разным осям, в одном устройстве. Для хранения и реализации закона управления используется преобразовательное устройство, которое может представлять собой, например, операционный усилитель, пассивную корректирующую цепочку или цифровое управляющее устройство, например ЭВМ, в которую заложен закон управления. Конструкция и принцип работы преобразовательного устройства не являются существенными.
При необходимости точного перемещения груза на малое расстояние l(l d). гдео
- расстояние между проекциями барабанов лебедок одного канала на горизонтальную плоскость, когда такого перемещения трудно достичь механизмом перемещения подъемно-транспортного средства, то в состав любого из звеньев системы управления может входить устройство управления, способное таким образом воздействовать на электроприводы лебедок, чтобы в результа0 те на один барабан канат наматывался и синхронно с ним с барабана того же канала канат сматывался. В результате происходит горизонтальное положение груза. Устройство управления конструктивно может быть
5 вынесено за пределы устройства, в состав которого входит, или же может быть выполнено в одном блоке с последним, например устройство управления выполнено в виде пульта, находящегося у крановщика или
0 ЭВМ, которая является преобразовательным устройством, работает и как устройство управления. Одним из простейших вариан- . тов реализации устройства управления может быть ручной пульт управления,
5 включающий в свой состав два потенциометра со средней точкой, смещением подвижных контактов которых можно формировать требуемые сигналы рассогласования, которые преобразовательным уст0 ройством воспринимаются как статическая ошибка. К выходу преобразовательного устройства подключено исполнительное устройство, служащее для непосредственного управления работой лебедок. Например,
5 оно может представлять собой некоторую тиристорную или релейную схему, управляющую работой электропривода в соответствии со снимаемыми с преобразовательного устройства сигналами. Принцип работы и
0 конструкция исполнительного устройства могут быть любыми. Конструктивно оно может быть выполнено как в виде отдельного устройства, так и может быть объединено с преобразовательным устройством или с
5 электроприводом лебедок.
Исполнительным органом системы управления являются лебедки, приводимые в движение электроприводом.
На фиг. 1 представлена векторная диаг0 рамма сил при отсутствии возмущений и управления; на фип2 - векторная диаграмма, на которой поясняется, каким образом возникает управляющая сила Fy; на фиг.З - пример конструкции механической части
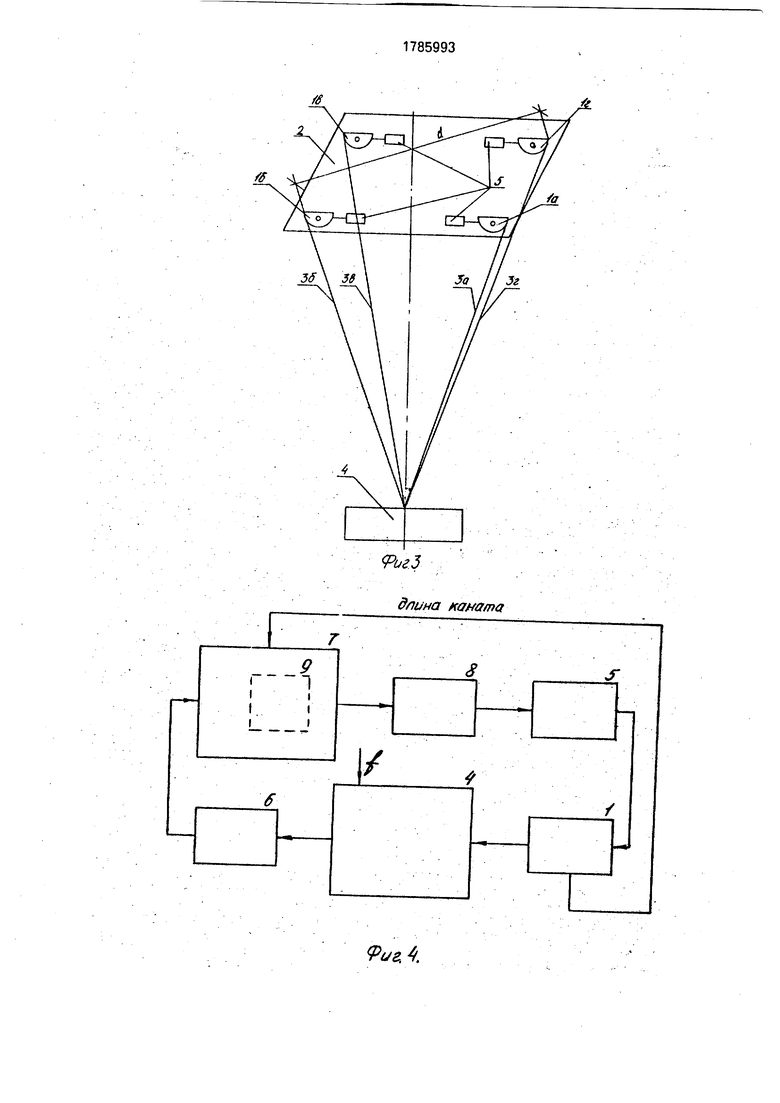
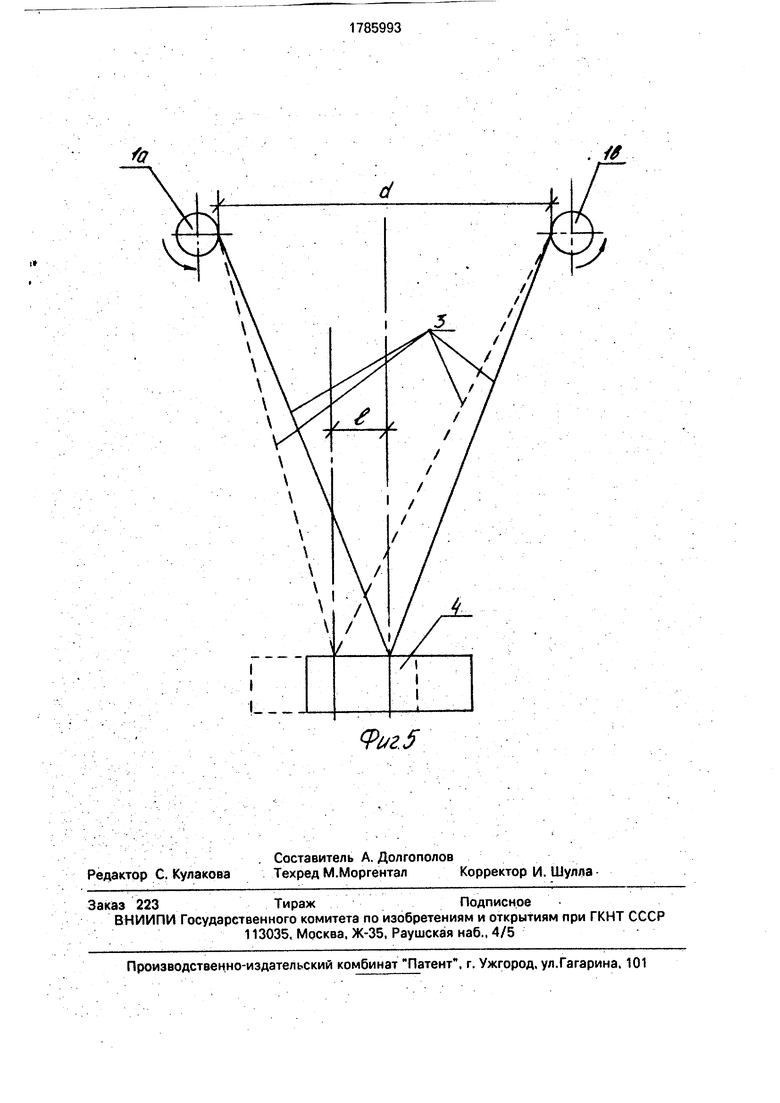
5 стабилизатора колебаний груза Долгополо- ва; на фиг4 - пример системы управления; на фиг.5 - работа устройства в режиме точных перемещений груза.
На фиг.З представлен пример конструк- ции механической части стабилизатора колебаний груза Долгополова. который состоит из четырех лебедок 1а, 16,1в, 1г, закрепленных на механизме 2 перемещения груза (например, на тележке) так, что барабаны лебедок в плане образуют четырехугольник с взаимно перпендикулярными диагоналями (например, квадрат, ромб и т.п.). С барабанов лебедок опускаются четыре каната 3, соединенные вместе в точке крепления груза 4. Для приведения в действие лебедок 1 используются четыре реверсивных электродвигателя (ЭД) 5, которые попарно управляются замкнутой двухканальной системой управления, пример одного канала которой представлен на-фиг.4, который состоит из датчика ускорения движения груза (ДУ) 6, преобразовательного устройства (ПУ) 7, исполнительного устройства (ИУ) 8, на выход которого подключены ЭД 5, приводящие в движение исполнительный орган (НО), которым являются лебедки 1, объектом управления (О У) для данной системы управления является груз 4, на который воздействуют возмущения f. Для корректировки закона управления в зависимости от изменения длины канатов 3 служит обратная связь между ИО 1 и ПУ 7. Для точного перемещения груза на малое расстояние I (К d), где d - расстояние между проекциями барабанов лебедок одного канала на горизонтальную плоскость фиг.З, в состав ПУ 7 может входить устройство управления (УУ) 9, способное формировать сигнал рассогласования, по величине пропорциональный требуемому смещению и обратный ему по знаку . В простейшем случае УУ 9 может представлять собой два потенциометра со средней точкой.
Теперь рассмотрим работу стабилизатора колебаний груза. Состояние стабилизатора при отсутствии внешних возмущений f и управляющих воздействий Fy иллюстрируется векторной диаграммой на фиг.1 и формулой (1).
При появлении возмущения f его измеряют ДУ б (фиг,4) и подает сигнал, пропорциональный возмущению f, на вход ПУ 7, которое этот сигнал преобразует в соответ- ствии с заложенным в него законом управления и подает этот преобразованный сигнал на вход ИУ 8, которое создает разность напряжений на обмотках ЭД 5, соответствующую поступающему на входу ИУ 8 сигналу. Эта разность напряжений на обмотках ЭД 5 приводит к разности крутящих моментов на валах последних, которая передается на барабаны соответствующих лебедок НО 1. Разность моментов на валах лебедок приводит к разности сил натяжения канатов (фиг.2), которую можно определить по формуле
/FH3/-/FHB/- ,(3)
где Ма, Мв - крутящие моменты на барабанах лебедок 1а и 1 в;
Ra, Re - радиусы барабанов лебедок 1а и 1в.
Так как в данном случае Ra Re R, то формулу (3) можно записать в виде / с / /с / Ма -Мв Ма-Ма f.)
/Гна/ -/ гнв/ ---Б-- (4J
Теперь при помощи векторной диаграммы (фиг.2) и формулы (2) найдем величину управляющего воздействия Fy:
Fy - FH8 + FHB + P,(2) где Fy-управляющее воздействие, возникающее в результате разности сил натяжения канатов; р - вес (сила тяжести) груза.
Спроецируем все силы на ось действия силы Fy.
/Fy/ /РнаЛ COS а - /Рнв/ COS в , (5)
где а ,/3- углы между канатами лебедок 1а, 1в и горизонтальной плоскостью.
Так как величины углов а и ft практически равны , то выражегие(5)можно записать в виде /Fy/ /FHa/- cos a - /FHB/ cos a «
(/Рна/-/Рнв/) COSa ,(6)
Подставив формулу (4) в выражение (6), получим
35
1г. , Ма Мв /F/ CQS a
Таким образом мы получим зависимость величины управляющего воздействия /Fy/ от разности моментов на барабанах
лебедок 1. Очевидно, что для создания такой разности моментов достаточно изменить лишь величины токов, протекающих в обмотках ЭД приводов лебедок, что не
требует приведения в движение механических узлов, что повышает быстродействие, а следовательно, и эффективность стабилизации.
При необходимости точного перемещения груза на малое расстояние I, где I d (d. - расстояние между лебедками одного канала фиг.З), когда нужную точность трудно достичь перемещением тележку УУ (9) (фиг.4) формирует сигнал рассогласования,
подаваемый на вход ЛУ 7. Формироваться этот сигнал может различными способами: вручную или автоматически, может передаваться по каналам связи и т.д. В простейшем случае сигнал может формироваться смещением базы потенциометра в УУ 9. В
результате ПУ 7 кажется, что на груз воздействует постоянное возмущение и для его компенсации система управления формирует управляющее воздействие Fy, направленное в сторону требуемого перемещения и пропорциональное его величине. Поскольку возмущающее воздействие, которому как бы препятствует данное управляющее воздействие Fy, фактически отсутствует, то разность моментов на барабанах лебедок приводит к изменению длин канатов одного канала, а следо- вательно, и к горизонтальному перемещению груза. На фиг.5 сплошными линиями показано положение канатов 3 одного канала и груза 4 до начала перемещений, пунктиром показано положение после перемещения на заданное расстояние I, меньшее расстояния d между барабанами лебедок одного канала. Стрелками показаны направления вращения барабанов лебедок (1а и 1в) одного канала для создания данного перемещения.
Формул а изо бретен и я Стабилизатор колебаний груза, подвешенного к механизму перемещения подъемно-транспортного средства, содержащий
установленный на механизме перемещения электропривод, включающий в себя реверсивный электродвигатель, систему управления последним, включающую в себя датчики ускорения движения груза, отличающ и и с я тем, что, привод дополнительно включает в себя три электродвигателя и связанные с последними и основным лебедки, барабаны которых размещены с образованием ими в плане четырехугольника с взаимно перпендикулярными диагоналями, канаты соединены вместе в точке крепления груза, а система управления приводом выполнена замкнутой двухканальной, каждый из ее каналов дополнительно включает
в себя соединенное с датчиком ускорения преобразовательное устройство, связанное с ним исполнительное устройство, взаимодействующее с двумя лебедками.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН С СИСТЕМОЙ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2090486C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556041C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| Устройство для подвески и перемещения люльки | 1983 |
|
SU1126675A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ | 1996 |
|
RU2117126C1 |
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК (ВАРИАНТЫ) | 1994 |
|
RU2083451C1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК | 2001 |
|
RU2209176C2 |
| Безопасное грузоподъемное полиспастное устройство | 1985 |
|
SU1318514A1 |
Изобретение относится к подъемно- транспортному машиностроению. Сущность изобретения: груз подвешивается механизмом перемещения подъёмно-транспортного средства за одну точку четырьмя канатами, образующими в плане квадрат или ромб, канаты намотаны на четыре барабана. По сигналам датчиков ускорения груза включается тот или иной барабан, чем осуществляется стабилизация колебаний груза. 5 ил.:
Фиг.1
Фиг2Фи г.3длина каната
Фиг. 4.
Фж5.
| Способ демпфирования колебаний груза и устройство для его осуществления | 1974 |
|
SU640960A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
