Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам, разгружающим пролетное строение от поперечного изгиба и снижающим горизонтальные колебания груза.
Известен грузоподъемный кран мостового типа (см. а. с. СССР N 1117276, кл. B 66C 17/00, 1984), содержащий концевые балки, пролетное строение, вдоль которого размещен несущий канат, по которому перемещается грузовая тележка с механизмом подъема и подъемным канатом. Пролетное строение снабжено верхним и нижним шпренгелями. Привод тележки снабжен дополнительными блоками, установленными на концевых балках и верхнем поясе пролетного строения, посредством которых часть веса поднимаемого груза нагружает пролетное строение продольной сжимающей силой.
Известен кран мостового типа (см. а. с. N 1117275, кл. B 66C 17/00, 1984), содержащий пролетное строение с тележкой, снабженной грузовой подвеской и установленными на тележке боковыми отклоняющими и верхними блоками, с помощью которых часть веса груза преобразуется в усилие, сжимающее пролетное строение. В данной конструкции привод подъема вынесен на пролетное строение и расположен у концевых балок, в результате чего тележка разгружена от массы привода подъема.
Недостатками данных конструкций являются их достаточно высокая металлоемкость вследствие того, что пролетное строение является неразгруженным от поперечного изгиба собственным весом, а также наличие двух систем канатов и двух приводов перемещения тележки и подъема груза.
Наиболее близким к предлагаемому является грузоподъемный кран мостового типа (см. а. с. СССР N 612894, кл. B 66C 17/00, 1978), принятый за прототип, содержащий пролетное строение, вдоль которого размещены несущие канаты, концы которых закреплены на концевых балках ниже продольной оси сечения пролетного строения. По несущим канатам перемещаются грузовые тележки. Кран имеет два механизма перемещения грузовой тележки и передвижения грузозахватного органа, жестко закрепленных на концевых балках и работающих независимо друг от друга.
Пролетное строение данной конструкции нагружено двумя разнонаправленными изгибающими моментами: отрицательным изгибающим моментом Mи переменной величины от собственного веса пролетного строения и положительным разгружающим изгибающим моментом Мp постоянной величины.
Недостатки данной конструкции следующие. При постоянной массе груза отсутствует возможность регулирования величины разгружающего момента, так как расстояние по вертикали между креплением несущих канатов и продольной осью сечения пролетного строения остается неизменным. При этом в случае подъема максимального груза приопорные области пролетного строения оказываются перегруженными разгружающим моментом, так как на этих участках он не компенсируется изгибающим моментом от собственного веса из-за малой величины плеча. В результате этого металлоемкость остается достаточно высокой. Кроме того, недостатком является наличие двух независимых приводов подъема груза и перемещения тележки, что усложняет управление перемещением груза.
Общим недостатком всех рассмотренных конструкций является возможность возникновения горизонтальных колебаний груза при движении тележки по несущим канатам, так как отсутствуют средства управления колебанием груза, что отрицательно воздействует на качество и точность работы крана.
Технический результат, ожидаемый от изобретения, улучшение качественных характеристик работы крановой системы (точности, плавности, скорости перемещения груза), ее габаритных и весовых параметров.
Это достигается тем, что кран содержит пролетное строение, две лебедки на тележках, размещенных на консолях, расположенных ниже оси сечения пролетного строения в приопорных его областях, и систему управления, состоящую из управляющего модуля, соединенного с датчиками положения колебания груза и натяжения канатов и лебедками посредством коммутирующего устройства, интерфейсов и кабелей прямой и обратной связи.
Установка лебедок на тележках, размещенных на консолях, и введение системы автоматического управления перемещение тележек и работой лебедок обеспечивают улучшение качественных характеристик работы крановой системы за счет оптимизации траектории и времени перемещения груза и предотвращения его горизонтальных колебаний, снижение металлоемкости и габаритных параметров за счет разгрузки пролетного строения и, как следствие, уменьшение поперечного сечения.
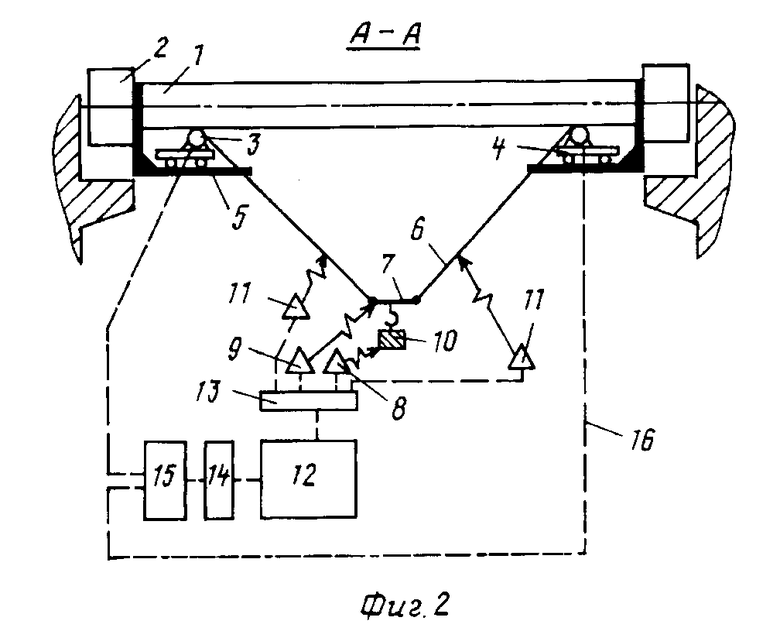
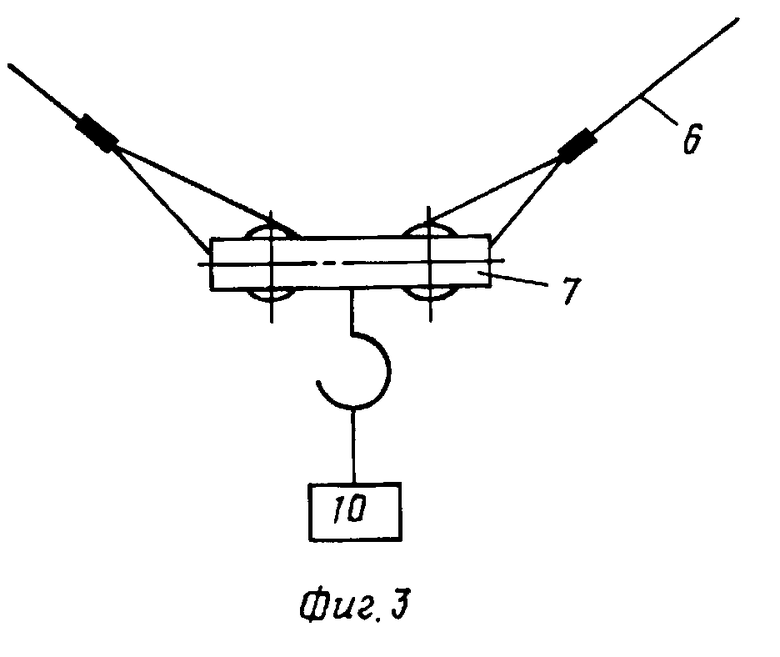
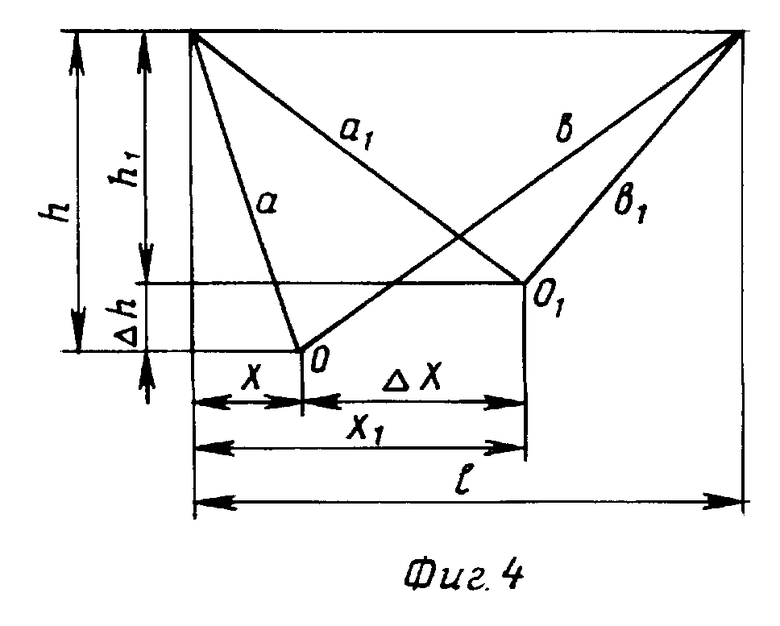
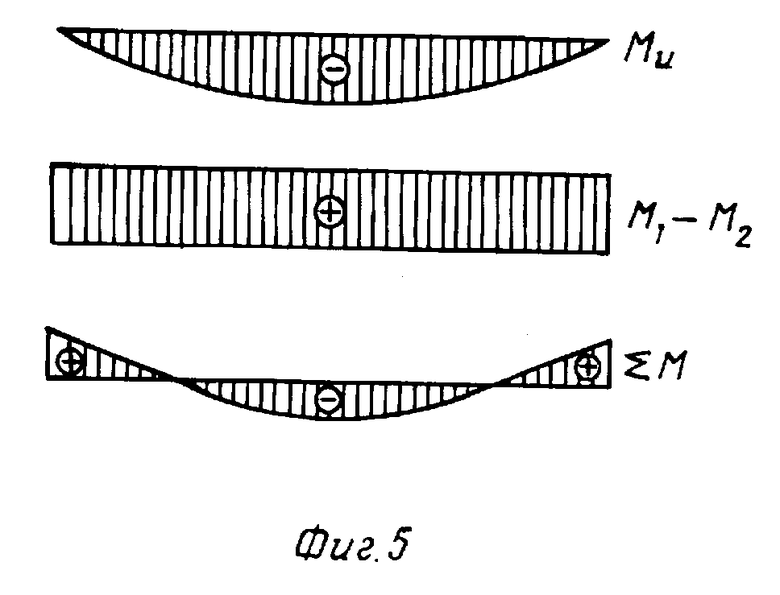
Изобретение поясняется чертежами, где на фиг.1, 2 общий вид крана, на фиг.3 схема крепления канатов на грузовой подвеске, на фиг.4 положение груза и соотношение правого и левого канатов, на фиг.5 эпюры изгибающих моментов пролетного строения, на фиг.6 схема нагрузок на лебедку и приопорную область пролетного строения.
Предлагаемый кран мостового или козлового типа показан на фиг.1,2 и представляет собой систему, содержащую пролетное строение 1, концевые балки 2, две лебедки 3 с короткозамкнутым двигателем и частотным преобразователем на тележках 4, установленных эксцентрично по отношению к продольной оси сечения пролетного строения на консолях 5 в приопорных участках пролетного строения и обладающих подвижностью и возможностью стопорения на этих участках, грузовые канаты 6, каждый из которых одним концом закреплен на грузовой подвеске 7 (фиг. 3), а другим соединен с лебедками 3, систему управления, включающую в себя датчики 8, 9 положения и колебания груза 10 соответственно, датчики 11 натяжения канатов 6, управляющий модуль 12, входной интерфейс 13, преобразующий сигналы с датчиков 8, 9, 11 для управляющей программы, выходной интерфейс 14, передающий команды лебедкам 3, коммутирующее устройство 15 и кабели 16 прямой и обратной связи.
Кран с автоматической системой управления в соответствии с задачей перемещения груза из положения O в положение O1 (см. фиг.4) работает следующим образом. Вначале задается исходная информация для управляющей программы, содержащая координаты начального O и конечного O1 положений груза 10. Траектория перемещения груза может быть задана аналитически или определяться программно в соответствии с одним из выбранных критериев (минимизация времени перемещения, инерционных нагрузок, затраченной энергии и т.п.). После этого производится зацепление груза 10 и включение системы оператором. Управляющий модуль работает по программе управления траекторией груза и гашения его колебаний. На основе заданной информации программа вырабатывает эффективную траекторию движения (в случае, если она не заданна в явном виде) груза 10, режимы работы лебедок 3 и движения (стопорения) тележек 4. Программа предусматривает постоянный контроль и корректировку режимов работы лебедок 3 и тележек 4 в соответствии с показаниями датчиков 8, 9, 11, включая устранение динамических эффектов (горизонтального колебания груза 10) притормаживанием и подтягиванием одного из канатов 6. Поднимаемый груз 10 создает растяжение грузовых канатов 6, которые оказывают сжимающее воздействие на пролетное строение 1 и создают изгибающий момент, направленный противоположно изгибающему моменту от собственного веса пролетного строения 1. Таким образом создается разгружающий эффект предварительного обжатия пролетного строения. При работе обеих лебедок "на подъем" ("на спуск") происходит поднятие (опускание) груза с его транспортировкой или без транспортировки вдоль пролетного строения (в зависимости от соотношения частот вращения лебедок). При работе только одной лебедки груз 10 одновременно перемещается по горизонтали и вертикали. Перемещение груза 10 по горизонтали происходит в том случае, когда одна лебедка работает "на спуск", то есть канат сматывается с ее барабана, а другая "на подъем", то есть выбирает освобождающуюся длину каната 6 (при этом соотношение частот вращения лебедок изменяется в зависимости от положения груза по длине пролетного строения). Лебедка, с которой при перемещении груза 10 сматывается канат 6, работает при этом в режиме притормаживания, что следующим образом устраняет возможность горизонтального колебания груза 10 при его перемещении вдоль пролетного строения 1. При перемещении груза возникают динамические процессы (колебания) в зависимости от массы груза и скорости его движения. Датчики 8, 9 положения и колебания груза 10 учитывают перемещения и возможные колебания, эта информация поступает в программу контроля и корректировки движения. В силу инерционности при резком останове груза 10 возможно возникновение колебаний, при этом один из канатов 6 натягивается сильнее, а другой ослабевает, в канатах возникают пульсирующие напряжения. Затормаживанием и подтягиванием ослабевшего каната с использованием датчиков 11 натяжения каната предотвращаются ослабление одного из канатов 6 и колебания груза 10. Тем самым обеспечивается качественная работа, увеличивается точность установки груза и сокращается время цикла (так как устраняется время успокоения груза).
Положение груза 10 по вертикали и горизонтали определяется длиной a и b грузовых канатов 6 (фиг.4). Расчет траектории производится на основе следующих соображений. Перемещение груза 10 из положения O в положение O1 равнозначно изменению положения груза по горизонтали на Δx и по вертикале на Δh. Перемещение груза по горизонтали на Δx требует изменения длины левого каната на
и длины правого каната на .
.
Перемещение груза 10 по вертикали на Δh требует изменения длины левого каната на
и длины правого каната на .
.
Перемещение груза из положения O в положение O1 требует изменения длины левого каната на Δa = Δa′+Δa″ и длины правого каната 6 на Δb = Δb′+Δb″. В соответствии с вычисленными Δa и Δb система управления обеспечивает необходимое число оборотов двигателя лебедок 3.
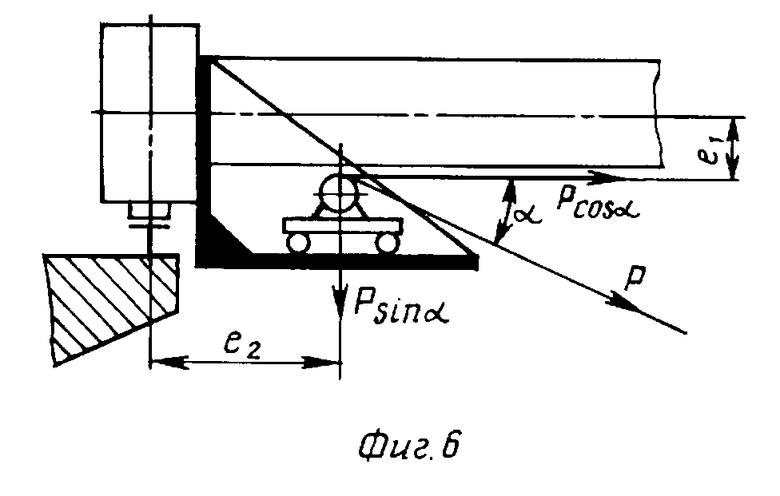
Эксцентричная установка консолей 5 необходима из следующих соображений. Под воздействием собственного веса пролетное строение прогибается и в середине его возникает максимальный прогиб Wmax, соответствующий максимальному изгибающему моменту (первая эпюра на фиг.5). Центральное приложение к пролетному строению 1 сил обжатия P•cosα приводит к возникновению дополнительного изгибающего момента M1= P•cosα•Wmax (см. фиг.6), следствием чего является повышенная деформативность и возможность потери устойчивости пролетного строения 1. Здесь P = mг•g(2sinα), mг масса груза, g ускорение свободного падения. Это предотвращается установкой консолей 5 таким образом, чтобы выполнялось условие e1≥Wmax.
При подъеме груза 10 возникает дополнительный изгибающий момент, являющийся разностью моментов M1= P•cosα•e1 и M2= P•sinα•e2 (фиг.6), зависящих от массы и положения груза, а также величины эксцентриситета e1 консоли 5 по отношению к продольной оси сечения пролетного строения и положения лебедки 3 e2 на консоли 5 (вторая эпюра на фиг.5). Тогда суммарный изгибающий момент, воздействующий на пролетное строение 1, определяется суммой моментов M1, M2 и Mи (изгибающий момент от собственного веса пролетного строения). Количественно указанные изгибающие моменты определяются следующим образом. Максимальный изгибающий момент от веса пролетного строения и груза Mи=mпс•g•l/8, разгружающий момент M1= mг•g•l•e1/(4•y), догружающий момент M2=mг•g•e2/2, где mпс масса пролетного строения, l длина пролетного строения, y расстояние по высоте между грузовой подвеской и пролетным строением.
Управляющий модуль 12 в соответствии с заложенной в нем программой и показаниями датчиков 8, 9 положения и колебания груза 10 осуществляет управление вращением лебедок 3 и перемещением (стопорением) тележек 4 таким образом, что суммарный изгибающий момент пролетного строения M=M1-M2+Mи в середине пролетного строения равен по величине и противоположен по знаку изгибающему моменту в приопорных областях пролетного строения (третья эпюра на фиг.5), в результате чего достигается снижение металлоемкости и размеров поперечного сечения.
После перемещения груза 10 из положения O в положение O1 по сигналу датчиков положения груза происходит отключение системы.
Установка подвижных лебедок на консолях, прикрепленных к торцевым сечениям пролетного строения с эксцентриситетом относительно его продольной оси и работающих согласованно под управлением автоматической системы, обеспечивает повышение точности, плавности, скорости перемещения груза, предотвращение его горизонтальных колебаний притормаживанием (ускорением) одной из лебедок, снижение металлоемкости и габаритных характеристик пролетного строения за счет уменьшения его поперечного сечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЯПЛЙОТЕКЯ I | 1970 |
|
SU271756A1 |
| Грузоподъемное устройство крана | 1972 |
|
SU475342A1 |
| Кран мостового типа | 1985 |
|
SU1257051A1 |
| Стреловой кран | 1976 |
|
SU703486A1 |
| Транспортерная галерея | 1987 |
|
SU1413224A1 |
| СБОРНО-РАЗБОРНЫЙ КОНСОЛЬНЫЙ КРАН | 2021 |
|
RU2774693C1 |
| СПОСОБ УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМИ КОНСТРУКЦИЯМИ | 1993 |
|
RU2068918C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Кран | 1983 |
|
SU1092132A1 |
| Козловый кран | 1970 |
|
SU436787A1 |
Использование: применяется в подъемно-транспортном машиностроении. Сущность изобретения: кран содержит пролетное строение, две лебедки на тележках, обладающих подвижностью и возможностью стопорения в приопорных зонах на консолях, расположенных эксцентрично относительно продольной оси сечения пролетного строения, грузовые канаты, каждый из которых одним концом закреплен на барабане лебедки, а другим запасован в грузовой подвеске, и систему автоматического управления, состоящую из управляющего модуля, соединенного с датчиками посредством коммутирующего устройства и кабелей прямой и обратной связи. 6 ил.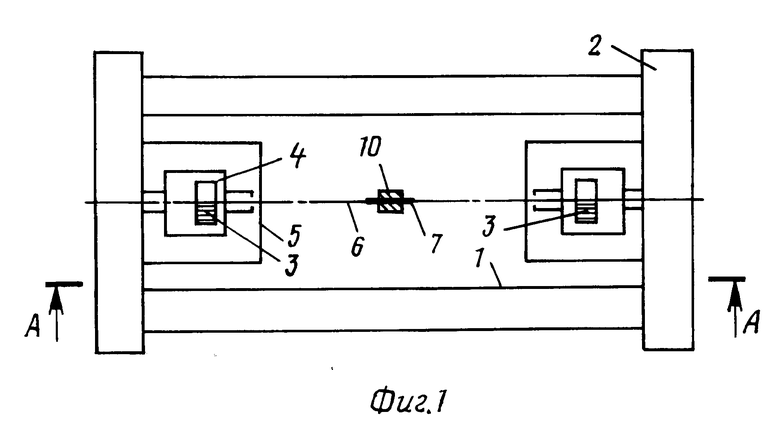
Кран с системой автоматического управления, содержащий пролетное строение, лебедки, расположенные ниже продольной оси пролетного строения, грузовые канаты с грузовой подвеской и систему управления перемещением груза, отличающийся тем, что лебедки установлены на подвижных тележках, выполненных с возможностью стопорения, которые расположены на консолях пролетного строения, консоли закреплены жестко к торцевым сечениям пролетного строения эксцентрично относительно его продольной оси и ориентированы внутрь пролетного строения, грузовые канаты каждой лебедки одним концом запасованы в грузовой подвеске, а другим на барабане лебедки, система управления перемещением груза выполнена автоматической, содержащей управляющий модуль, выполненный в виде ЭВМ с программой управления совместной работой лебедок по перемещению груза и стабилизации его положения на основе показаний датчиков положения, колебания груза и натяжения канатов, интерфейсами, коммутирующим устройством и кабелями связи между элементами системы управления.
| Грузоподъемный кран мостового типа | 1976 |
|
SU612894A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
