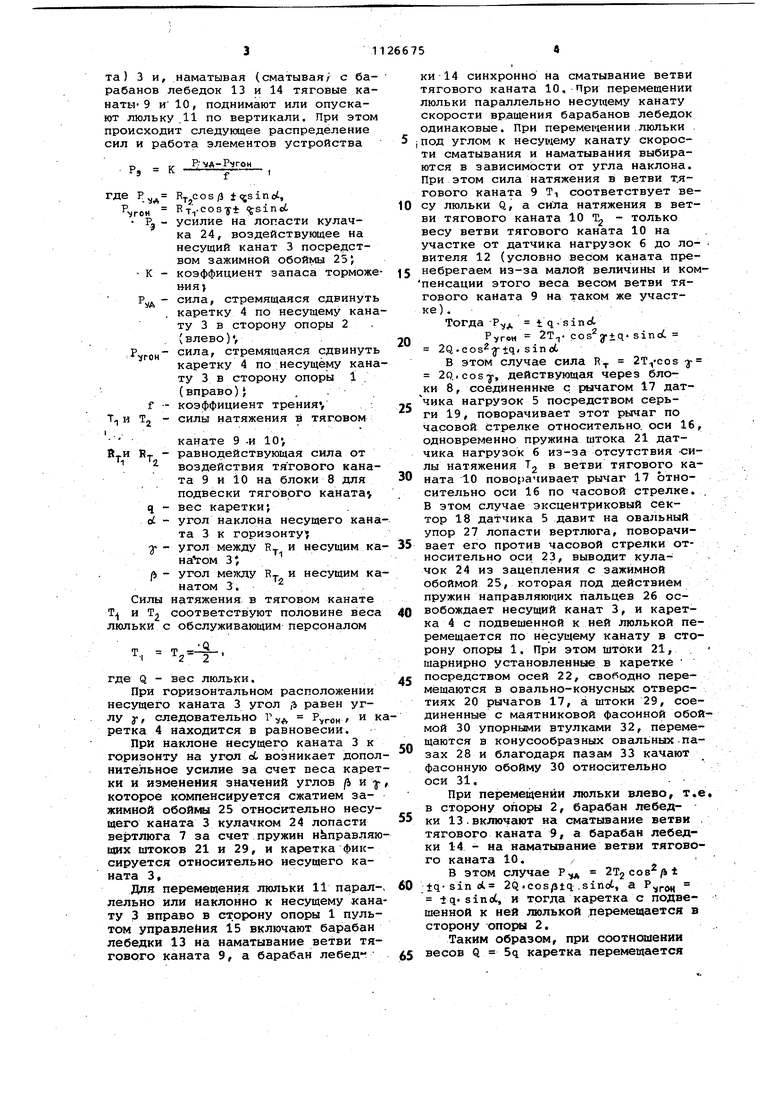
Изобретение относится к строительству и может быть- использовано в канатных дорогах и при ремонтных работах по периметру зданий и соор жений. Известно устройство для подвеск и перемещения люльки, содержащее опорный канат, на котором установлена каретка, оборудованная ролико вьм зажимом Однако известное устройство не обеспечивает перемещения геольки в горизонтальной плоскости и параллельно опорному канату при работе на нижних уровнях от опорного кана та, в результате чего при производ стве работ приходится осуществлять кюроприятия,,связанные с потерей времени на осуществление холостого хода да)льки, Наиболее близким к предложенном по технической сущности и достигае мому положительному эффекту являет ся устройство для подвески и перемещения лим1ьки, включанвдее несущий канат, на котором установлена каретка, снабженная фиксирукицим отно сительно несущего каната механизмом и соединенная с люлькой посред ством тяговых канатов, прикрепленных к опорам и запасованных на барабанах лебедок 2. однако данное устройство не обе печивает перемещения люльки в горизонтальной плоскости и снизу ввер по наклонной плоскости в двух направлениях при удалении люльки от опорного каната, что привода1Т к до полнительной потере времени при ра боте с люлькой на разных уровнях относительно опорного каната. Цель изобретения - сокращение сроков производства работ и повышение производительности труда. Указанная цель достигается тем, что в устройстве для подвески и перемещения люльки, включаютаем несущий канат, на котором установлена каретка, снабженная фиксирующим относительно несущего каната механизмом и соединенная с люлькой посредством тяговых канатов, прикрепленных к опорам и запасованных на барабанах лебедок, фиксирующий механизм выполнен в виде трехлопастного вертлюга и взаимодействующих с ним маятниковой обойг вл и пары датчиков нагрузок, выполненных в виде подпружиненных рычагов, при этсяй вертлюг установлен с возможностью взаимодействия своей центральной лоиастью, выполненной в виде кулачка, во смонтированной на несущем канаfe подпружиненной зажимной обоймой, 9 боковыми лопастями - с рычагами и маятниковой обоймой, при этом боковые лопасти вертлюга выполнены с овальными упррами и конусообразными овальными пазами, в которых установлены подпружиненные направляющие штоки, соединенные с маятниковой обоймой, а к концам рычагов шарнирно подвешены блоки, через которые перекинуты тяговые канаты, одни концы которых жестко закреплены на неподвижной опоре, а другие - на барабанах лебедки, установленных в люльке. На фиг.1 представлено устройство, общий вид на фиг.2 - механизм, фиксируннаий каретку относительно несущего каната} на фиг.З - маятниковая фасонная обойма с направляющими штоками; на фиг.4 - узел 1 на фиг.1; на фиг.5 - перемещение люльки по . наклонной плоскости. Устройство для подвески и перемещения люльки содержит опоры 1 и 2, соединенные несущим канатом 3, на котором установлена каретка 4 с датчиками нагрузок 5 и 6 и трехлопастной вертлюг 7. К датчикс№4 нагрузок 5 и 6 шарнирно подвешены блоки 8 для подвески и перетягивания ветвей тягового каната 9 и 10. Один конец ветви тягового каната 9 и 10 крепят к опоре 1 и 2, другой конец запасоэывается в установленный в люльке 11 ловитель 12 и наматывае.тся на барабаны лебедок .13 и 14, соединенные с единьм пультом управления 15. Датчик нагрузок 5 и 6 установлен в каретке 4 посредством оси 16 и выполнен в виде подпружиненного рычага 17, один конец которого представляет собой зксцентриковый сектор 18, а другой - серьгу 19 для подвески блоков 8. В средней части рычага выполнено овально-конусное отверстие 20, в которое помещен подпружиненный шток 21, шарнирно установленный в корпусе каретки 4 посредством оси 22. Трехлопастной вертлюг 7 установлен в каретке 4 на оси 23 и имеет одну лопасть в виде кулачка 24, взаимодействующего с подпружиненной зажимной обоймой 25, снабженной подпружиненными направляющими пальцами 26, а две другие лопасти выполнены с овальньми упорами 27 и конусообразными овальными пазами 28, в которых находятся подпружиненные направляющие штоки 29, соединенные с маятниковой фасонной обоймой 30. Последняя установлена в каретке 4 на оси 31 и выполнена в виде двух колец, каждое из которых снабжено упорной втулкой 32 и пазом 33. Устройство- работает следующим образом. Опускание (подъем люльки по вертикали. При опускании (подъеме| люльк,и 11 по вертикали каретку 4 фиксируют относительно балки (несущего Ханата) 3 и, наматывая (сматывая/ с барабанов лебедок 13 и 14 тяговые канаты- 9 И 10, поднимают или опускают люльку .11 по вертикали. При этом происходит следующее распределение сил и работа элементов устройства
TJ г,- Р А-РЧГОН fy - к.f.1
где Р,,д Вт,созу1 i 5sinot, PVPOH RTvCosTft sinot Pj - усилие на лопасти кулачка 24, воздействующее на несущий канат 3 посредством зажимной обоймы 25} - К - коэффициент запаса торможения
- сила, стремящаяся сдвинуть . каретку 4 по несущему канату 3 в сторону опоры 2 (влево)V
сила, стремящаяся сдвинуть каретку 4 по несущему канату 3 в сторону опоры 1 (вправо)} , . f - коэффициент трения, Т и Tj - силы натяжения тяговом 1 .
канате 9 -и 10, R - равнодействующая сила от . воздействия тягового каната 9 и 10 на блоки 8 для подвески тягового каната, q - вес каретки; d - угол наклона несущего каната 3 к горизонту -у - угол между R и несущим кана сом 3
/J - угол между R и несущим канатом 3.
Силы натяжения в тяговом канате Т и Tj соответствуют половине веса люльки с обслуживаклдим персоналом
Q
ф „т - .
i., - 2
где Q - вес люльки.
При горизонтальном расположении несущего каната 3 угол ,г равен углу у, следовательно Г ,д Руго„ , и ка ретка 4 находится в равновесии.
При наклоне несущего каната 3 к горизонту на угол i возникает дополнительное усилие за счет веса каретки и изменения значений углов /i и-jкоторое компенсируется сжатием зажимной обойлеа 25 относительно несущего каната 3 кулачком 24 лопасти вертлюга 7 за счет пружин н правляющих штоков 21 и 29, и каретка фиксируется относительно несущего каната 3,
Для перемеиения люльки 11 парал-, лельно или наклонно к несущему канату 3 вправо в сторону опоры 1 пультом управлейия 15 включают барабан лебедки 13 на наматывание ветви тягового каната 9, а барабан лебедки 14 синхронно на сматывание ветви тягового каната 10. При перемещении люльки параллельно несущему канату скорости вращения барабанов лебедок одинаковые. При перемещении.лкшьки . 5 (ПОД углом к несущему канату скорости сматывания и наматывания выбираются в зависимости от угла наклона. При этом сила натяжения в ветви т.ягового каната 9 Т, соответствует ве0 су люльки Q, а сила натяжения в ветви тягового каната 10 Tg - только весу ветви тягового каната 10 на участке от датчика нагрузок 6 до ло- вителя 12 (условно весом каната пре5 небрегаем из-за малой величины и компенсации этого веса весом ветви тягового каната 9 на таком же участке).
Тогда -Ру, t q-sin A
0Ругом 2Тт . sinct
2Q.cos2 tqsinoC
В этом случае сила R 2Tycos -3- 2о..со5у, действующая через блоки 8, соединенные с рычагом 17 датчика нагрузок 5 посредством серь5
ги 19, поворачивает этот рычаг по часовой стрелке относительно, оси 16, одновременно пружина штока 21 датчика нагрузок 6 из-за отсутствия -силы натяжения Tj в ветви тягового ка0 ната 10 поворачивает рычаг 17 относительно оси 16 по часовой стрелке. . В этом случае эксцентриковый сектор 18 датчика 5 давит на овальный упор 27 лопасти вертлюга, поворачи5 вает его против часовой стрелки относительно оси 23, выводит кулачок 24 из зацепления с зажимной обоймой 25, которая под действием пружин направляющих пальцев 26 ос0 вобождает несущий канат 3, и каретка 4 с подвешенной к ней люлькой перемещается по несущему канату в сторону опоры 1. При этом штоки 21, шарнирно установленные в каретке
5 посредством осей 22, свободно перемещаются в овально-конусных отверстиях 20 рычагов 17, а штоки 29, соединенные с маятниковой фасонной обоймой 30 упорными втулками 32, переме щаются в конусообразных овальных.па зах 28 и благодаря пазам 33 качают фасонную обойму 30 относительно оси 31..
При перемещении люльки влево, т.е. в сторону опоры 2, барабан лебед5 ки 13.включают на сматывание ветви тягового каната 9, а барабан лебедки 14 - на наматывание ветви тягового каната 10.
В этом случае Р, 2T2C08 t
0 ±q-sinot 2Q .cosptq .sinot, a iq. sinot, и тогда каретка С подвешенной к ней люлькой .перемещается в сторону опоры 2..
Таким образом, при соотношении
5 весов Q 5q каретка перемещается
по несущему канату при угле наклона оС от , а при соотношении весов Q lOq устройство работает при углах наклона до 160 , что
обеспечивает многоцелевое назначение устройства, сокращает сроки работ и значительно повышает производи т ель но сть труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обслуживания труднодоступных участков объектов,установленных в одной плоскости на различных отметках | 1980 |
|
SU937674A1 |
| Устройство для обслуживания рабочих оттяжек мачт | 1976 |
|
SU919919A1 |
| ФАСАДНЫЙ ПОДЪЁМНИК С ВЕРТИКАЛЬНЫМ И ГОРИЗОНТАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ЛЮЛЬКИ | 2019 |
|
RU2724452C1 |
| Устройство для обслуживания рабочихОТТяжЕК МАчТ | 1979 |
|
SU804811A1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| Устройство для обслуживания рабочих оттяжек мачт | 1978 |
|
SU931903A1 |
| Маятниковая подвесная канатная дорога | 1961 |
|
SU142339A1 |
| ФАСАДНЫЙ ПОДЪЕМНИК С ВЕРТИКАЛЬНЫМ И ГОРИЗОНТАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ЛЮЛЬКИ | 2018 |
|
RU2704655C1 |
| МАЯТНИКОВАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 1969 |
|
SU253097A1 |
| Подвесная канатная дорога маятникового типа | 1958 |
|
SU123302A1 |


УСТРОЙСТВО ДЛЯ ПОДВЕСКИ И ПЕРЕМЕЩЕНИЯ ЛЮЛЬКИ, включающее несущий канат, на котором установлена каретка, снабженная фиксирующим относительно несущего каната механиз мом и соединенная с люлькой посредством тяговых канатов, прикреплен: ных к опорам и запасованных на бара банах лебедок, отличающее с я тем, ЧТО; с целью сокращения сроков производства работ и повышения производительности труда, фикси г рующий механизм выполнен в виде трехлопастного вертлюга и взаимодействующих с ним маятниковой обоймы и ла1%1 датчиков нагрузок, выполненных в виде подпружиненных рычагов, при этом вертлюг установлен с возможностью взаимодействия своей центральной лопастью, выполненной в виде кулачка, со смонтированной на несущем канате подпружиненной зажимной обоймой, а боковыми лопастями - с рычагами и маятниковой обоймой, при зтом бокбвые лопасти вертлюга выполнены с овальными упорами и конусообразными овальными пазами, в которых установлены подпружиненные направляю{1ие штоки, соединенные С маятниковой обоймой, а к концам рычагов шарнирно подвешены блоки, через которые перекинуты тяговые канаты одни концы которых жестко закреплены на неподвижной опоре, а другие - на барабанах лебедок, установленных в люльке. 
Фаз.2
/
JJ
3D
Фиг.З23
31
k
32
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для обслуживания труднодоступных участков объектов,установленных в одной плоскости на различных отметках | 1980 |
|
SU937674A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
