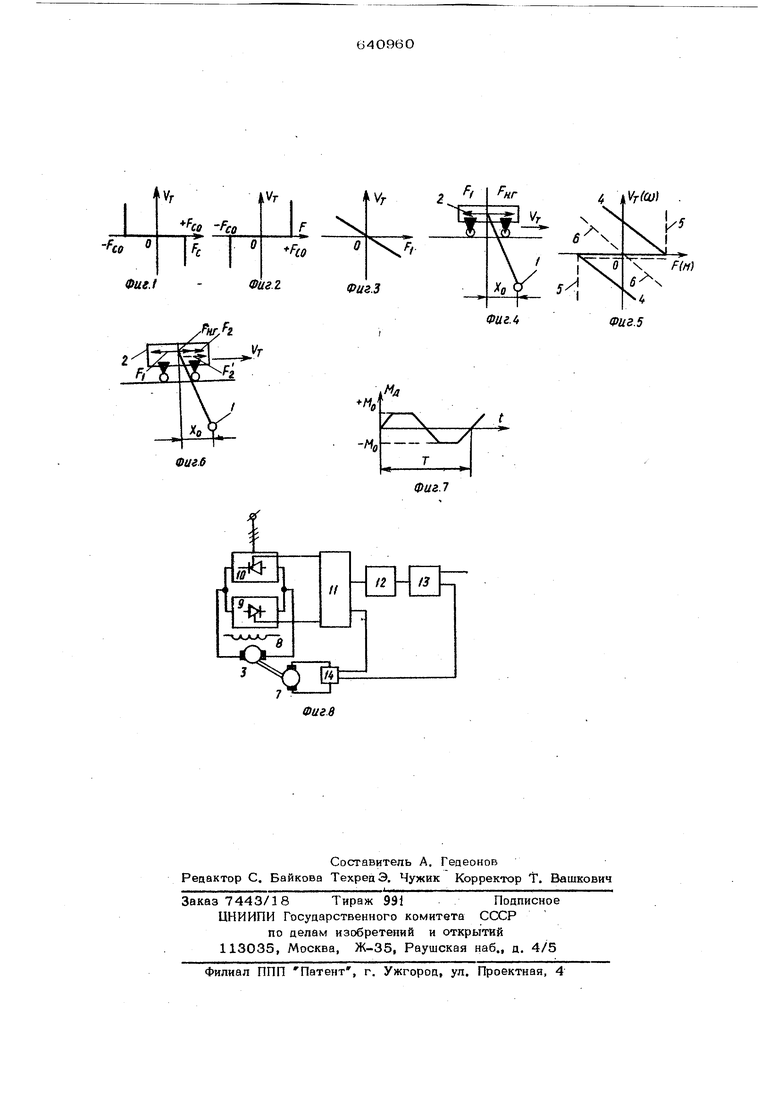
На фиг. 1 изображена известная зависимость силы, сопротивления движению механизма перемещения груза (например, тележки или механизма поворота) от его линейной скорости; на фиг. 2 - зависимость силы, равной по величине и противоположной по знаку силе сопротивления движению механизма перемещения, от его. линейной скорости; на фиг. 3 - зависимость силы, пропорциональной скорости механизма и направленной противоположно этой скорости, от самой скорости; на фиг, 4 - усилия, действующие на тележку при отклонении груза от своего положения равновесия; на фиг. 5 - зависимость момента, создаваемого электродвигателем механизма перемещения груза для реализации способа, от его угловой скорости} на фиг. 6 - действующие на тележ ку усилия с учетом силы, пропорциональ ной ускорению; на фиг. 7 - зависимость момента от времени, создаваемого приводным электродвигателем для осуществл ния компенсации сил.ы сопротивления движению механизма; на фиг. 8 - пример устройства, реализующего предлагаемьш способ демпфирован1{я колебаний груза с датчиком скорости. Принцип действия предлагаемого способа демпфирования колебаний груза 1 можно рассмотреть для одного из видов механизмов перемещения.- механизма грузовой тележки 2 электрического крана Преположкм, что сила сопротивления движению тележки 2 определяется только трением и ее зависимость от скорости имеет вид, показанный на фиг. 1. Если с помощью приводного электродвигателя 3 создать силу, равную по величине и пропшоположно направленную силе сопротивления движению тележки (фиг. 2) и приложить ее к тележке, то эта сила компенсирует силу сопротивления при любой скорости движения тележки/ Движение тележки следовательно будет определяться только горизонтальной составляющей , силы натяжения .каната/ которая при небольших углах отютонения каната с грузом от своего положения равновесия пропорциональна величине от клоненин X о Однако, указанная компенсация силы сопротивления недостаточна для демпфирования колебаний груза, поскольку при его отклонении горизонтал ная составляющая силы натяжения каната вызовет движение тележки, которое не ограничивается никакими тормозящими силами. 6 О4 С помощью электродвигателя 3 тележки 2 дополнительно создают силу f j , пропорциональную скоростиЛ7 движения тележки и направленную противоположно этой скорости. Зависимость указанной силы Г от скорости VT приведена на фиг. 3. Движение тележки в данном случае при раскачивании груза определяется следующими действующими на нее силами: горизонтальной составляющей t- силы натяжения каната и указанной сплои F . Эти силы показаны на фнг. 4. В процессе раскачивания груза под действием горизонтальной составляющей силы натяжения каната тележка движется в сторону отклоненного груза. При этом возникает сила i , направленная противоположно скорости движения. Раскачивающийся груз вызовет движение тележки и передает ей часть своей кинеТйческой энергии, а последняя переходит в электрическую энергию в электродвигателе, который является источником си- лыР , Когда вся кинетическаяэнергия груза израсходуется, он перестанет раскачиваться, а тележка будет неподвижкой. Предлагаемый способ демпфирования .колебаний раскачивающегося груза обеспечивает передачу кинетической энергии от груза тележке и далее источнику силы. К 1 даже при весьма небольших углах от1спонения груза, когда горизонтальная составляющая силы натяжения каната меньше силы сопротивления движению тележки. Указанная сила Р j может быть создана различными способами, из спо- собов состоит в создании составляющей момента приводного электродвигателя тележки, пропорциональной его скорости и противоположно ей направленной. При этом электродвигатель должен быть включен в схему, которая обеспечивает его работу на характеристике 4 (фиг, 5), Действительно, момент двигателя можно представить как сумму двух составляющих, соответствующих характеристикам 5 и 6 (фиг. 5), Первая составляющая момента (характеристика 5) обеспечивает создание силы, компенсирующей силу сопротивления (см. фиг. 1 и характеристику 5 на фиг. 5), а вторая составляющая момента ( характеристика 6) обеспечивает создание указанной силы Pi (см. фиг. 3 и характеристику 6 на фиг. 5). Механическая характеристика 4 (фиг. может бьть реализована на основе извес ных, реостатных способов регулирования скорости электропвигателей. Другой способ создания указанной си лы Р 1 состоит в использовании обра-г ной связи по скорости тележки в системе ее электропривода. Элемент обратной связи воспринимает скорость тележки (или пропорциональную этой скорости другую величину) и подает сигнал в сист му управления электроприводом для организации силы PI . Эффективность демпфирования колебаний груза существенно повьтшается, если создать силу, компенсирующую силу сопротивления, ввести указа1шую силур и дополнительно создать силу, пропорциональную отклонению груза от своего положения равновесия и направленную в сторону этого отклонения. В случае отклонения груза от положе ния равновесия горизонтальная составля юща:я силы натяжения каната вызывает движение тележки в сторону отклоненног груза, при этом кинетическая энергия тележки воспринимается .источником силы Г л .В случае приложения к тележк дополнительной силы, направленной в сто рону отклоненного груза, тележка получает от этой силы дополнительное ускорение в сторону положения равновесия груза и последний быстрее достигнет своего положения равновесия, чем при отсутствии этой дополнительной силы. Дополнительная сила так же, как и пропорциональная массе груза горизонтальная составляющая силы натяжения каната, пропорциональна отклонению груза от положения равновесия и направлена в сторону этого отклонения. Поэтому эта дополнительная сила Pj оказывает на успоко ение колебаний груза такое же действие, как и увеличение массы груза, а колебания болеетяжелого груза, как известно, быстрее затухают, чем более легкого. Для реализации силы F требуется датчик отклонения груза, что в некоторь случаях приводит к определенным техниче ким и эксплуатационным осложнениям. Эффективность демпфирования колебаний груза также существенно повышается, если создать силу, компенсирующую силу сопротивления, вести указанную силу Р ив дополнение к этому создать силу рл , пропорциональную ускорению тележки и по направлению совпадающую с этим ускорением. Для доказательства ЭТОГО положения следует рассмотреть уравнения движения тележки. На фиг. 6 показаны усилия, приложенные к тележке 2 крана, которые с учетом сказанного выше преаставляются в виде: H.r..r. 2. (1-4) - ковффиииевты К, , К, н.г. 2 пропорциональности. В случаях, когда дополнительная сила пропорциональна отклонению Хд груза или пропорциональна ускорению тележки, уравнения движения имеют вид соответственно:dVm.го-«1 т Хо dl , ciYr r Кцр Хд где m - масса тележки. Эти уравнения представляются следующим образом: (К 2 + Н.Г.) - « Л TTJ , Ут.т Уравнения (7) и (8) аналогичны друг другу. Следовательно, приложение к тележке силы Fg , пропорциональной ускорению тележки, приводит примерно к такому же эффекту, как и приложение силы Г , пропорциональной отклонению груза, и способствует эффективному демпфированию колебаний груза. создания силы Кл требуется дат чик ускорения тележки, что не встречает больших технических осложнений. На фиг. 8 приведена схема устройства для реализации предлагаемого способа с электродвигателем 3 постоянного тока и атчиком 7 скорости, используемым для управления компенсацией силы сопротивления. В этом устройстве обеспечивается ериодическое изменение момента приводого электродвигателя 3 тележки 2 в оответствии с графиком на фиг. 7. Моент двигателя Мд изменяется в преелах + Мл , где MO - знпчение момента, несколько меньше, чем момент от сип сопротивления движению тележки 2, Если груз 1 не колеблется и канат расположен вертикально, то составляющая силы натяжений каната, вызывающая дви жение тележки 2, равна нулю. При этом тележка 2 будет неподвижна, так как момент электродвигателя 3 меньше моме та сопротивления. Если канат с грузом 1 отклоняется на некоторый угол, то появ- ляется составляющая силы натяжения каната, которая стремится вьзвать движен тележки 2 в сторону отклонения груза. Следует отметить, что период колебаний рйскачиваюшегося груза 1 обычно большой - 4-5 секунд и более. При этом период Т (фиг. 7) колебаний момента электродвигателя 3 следует задавать равным не б.олее 0,4-0,5 секунды, т.е. на порядок меньше периода колебаний груза 1. , Движение тележки определяется следу ющими действующими на нее силами: горизонтальной составляющей силы натя жения каната, силой сопротивления движе нию и пульсирующей во времени силой, пропорциональной моменту двигателя. Движение тележки возможно только в ст рону отклонения груза, так как амплитуда пульсирующей силы меньше силы трения. При этом движение тележки возника ет даже при очень небольшом отклонений груза. Допустим, что груз отклонен на небольшой угол, при котором горизонтальная составляющая силы натяжения каната невелика и меньше силы трения. Движение тележки возникнет тогда, когд знак пульсирующей силы, пропорциональной пульсирующему моменту двигателя, совпадает с указанной составляющей силы натяжения каната, а это совпадени произойдет небольшой промежуток времени после начала отклонения груза, поскольку период изменения момента , двигателя значительно меньше периода собственных колебаний груза, а амплиту да пульсирующего момента двигателя лишь ненамного меньше момента от силы сопротивления движению тележки. Из приведенных рассуждений следует, что даже при очень небольших углах отклонения груза 1 от своего положения равновесия начнется движение тележки 2, Если к валу приводного электродвигателя . 3 тележки 2 присоединен датчик 7 скорости тахогенератор (ИЛИ хотя бы датчик знака скорости, кот рый срабатывает в начале движения тележки), то на его зажимах появится напряжение при достаточно углах отклонения груза 1, а это напряжение можно использовать для управления работой электродвигателя 3 ;Н9 участке механической характеристики, расположенном в верхней, либо нижней полуплоскости (фиг. 5), или для управления созданием электродвигателем 3 момента, равного по величине и противоположного по направлению моменту от сил сопротивления (т.е. для управления процессом компенсации сил сопротивления). Описанный принцип использован в устройстве, структурная Схема которого приведена на фиг. 8. Якорь электродвигателя 3 постоянного тока, имеющего обмотку 8 независимого возбуждения, подключен к реверсивному вентильному преобразователю, состоящему из двух вентильных трупп - 9 и 10. Вентильные группы 9 и 10 управляются от системы управления 11, один из входов которой подключен к генератору 12 трапецеидальных разнополярньк имйульсов, а последний - к выходу логического элемента 13 типа И-НЕ. Вал электродвигателя 3 сочленен с валом датчика 7 скорости, вьтолненного, например в виде тахогенератора, а зажимы последнего подключены к поляризованному реле 14 с нейтральным положением и двумя выходами, один из которых подсоединен к входу логического элемента 13, а другой - к входу системы управления 11. Устройство по схеме на фиг, 8 работает следующим, образом. При приближении груза 1, перемещаемого краном, к месту его остановки электродвигатель 3 тележки 2 останавливается, а затем включается в схему эле1сгропривода, показанную на фиг. 8. При этом на один из входов логического элемента 13 подается задающий сигнал, запускающий генератор 12 импульсов. Поступление импульсов определяет возникновение момента приводного электродвигателя 3 тележки 2, изменяющегося по трапецеидальному закону в соответствии с графиком на фиг. 7. В случае отклонения груза 1 под действием горизонтальной составляющей силы натяжения каната и указан.ого момента электродвигателя 3 тележка 2 крана стронется с -места в сторону отклонения, груза 1. При этом на зажимах датчика 7 скорости появится напряжение, которое приводит к вадтючению реле 14. Выходной сигнал этого реле пос- тунает на один из входов логического элемента 13 и вызьгеает его отключение, что, в свою очерепь, вызывает прекращение генерации импульсов генератором 12. Выходной сигнал реле 14, подключенного также к системе управления 11, определяет возникновение момента электродвига теля 3, равного по величине и противоположно направленного моменту от силы сопротивления движению 2, При этом электродвигатель 3 будет работать на тре буемом участке характеристики 4 на фиг. и колебания груза будут демпфироваться. Когда в процессе колебания груза 1 его отклонение станет достаточно малым, равно как и горизонтальная составляющая силы натяжения каната, то скорость электродвигателя 3 снизится до достаточно малой величины, и ЭДС датчика 7 скорости уменьшится также до малой величины, вызывая отключение реле 14. Отсутствие сигнала на входе логического элемента 13 вызывает наличие сигнала на его вътходе. При этом генератор 12 вновь начнет генерировать импульсы. В случае отклонения груза 1 в противоположном на правлении устройство работает аналогичным образом. Формула изобретения 1. Способ демпфирования колебаний груза, подвешенного к механизму перемещения подъемно-транспортного средства, заключающийся в силовом воздействии на механизм перемещения, отличающийся тем, что, с целью повы шения эффективности, силовое воздействие осуществляют силой, равной по величине силе сопротивления движению и направленной в противоположную сторону, а также силой, пропорциональной скорости движения механизма перемещения и направленг ной противоположно этой скорости. 2.Способ по п. 1, отличающийся тем, что силовое воздействие осуществляют силой, пропорциональной ускорению механизма перемещения и направленной в сторону этого ускорения. 3.Устройство для осуществления способа по п. 1, содержащее реверсивный электропривод с системой управления и датчиком скорости, отличающееся тем, что оно снабжено генератором импульсов, логическим элементрм типа И-НЕ и поляризованным реле с нейтральным положением, причем вход поляризованного реле подключен к датчику скорости, Bbixoa поляризованного реле соединен с входами системы управления и логического элемента, а выход логического элмента подключен к входу генератора импульсов, выход которого подсоединен ко входу дистемы управления. Источники информации, принятые во внимание при экспертизе: 1.Статья Теличко Л. Я, Ограничение раскачивания грузгж при работе механизмов передвижения и поворота кранов , труды Фрунзенского политехнического института, вып. 58, 1972. 2.Патент ФРГ №1278079, кл. 35 В 5/О1, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления механизмом передвижения подвешенного на канате груза | 1989 |
|
SU1794865A1 |
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1979 |
|
SU1018899A1 |
| Стабилизатор колебаний груза Долгополова | 1990 |
|
SU1785993A1 |
| Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1981 |
|
SU965959A1 |
| Способ управления мостовым краном на основе скоростного ПД-регулятора | 2024 |
|
RU2829659C1 |
| Способ гашения колебаний груза и устройство для его осуществления | 1989 |
|
SU1801923A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| Устройство для демпфирования колебаний грузозахватного органа крана | 1977 |
|
SU1053443A1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| КРАН С СИСТЕМОЙ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2090486C1 |