Блок 64 может содержать логические элементы НЕ 72, 73 и И 74. Выходы логических элементов НЕ 72, 73 связаны со входами логического элемента И 74. Входы элементов НЕ 72, 73 блока 64 соответственно связаны с первым и вторым входами этого блока. Третий вход блока 64 связан с третьим входом логического элемента И 74 этого блока, а его выход связан с выходом этого логического элемента. Блок 63 задержки может содержать логические элементы НЕ 75, 76, И 77, а также элемент 78 выдержки времени, установленные последовательно, причем выход элемента НЕ 75 связан со вторым входом элемента И 77. Вход блока 63 задержки связан с входом элемента НЕ 75, а выход - с выходом элемента НЕ 76.
На выходе пульта 4 управления в лини- ях41,42,43,44датчика 22 давления изображены вырабатываемые сигналы Xi,,..,Xs, на выходе логических элементов ИЛИ 50, И 58, 48, 47, НЕ 61, И 49, НЕ 73, 65, И 66, 69 - сигналы Yi,...,Yio; на выходе логического элемента И 59, элементов 55, 56 выдержки времени, логических элементов ИЛИ 51, ЗАПРЕТ 52, НЕ 72, ИЛИ 68, НЕ 75, ИЛИ 67 - сигналы Z4,...,Zg; на выходах логических элементов НЕ 60, 62, И 74, элемента выдержки времени 78, логических элементов И 77, НЕ 71, И 70 - сигналы Vi,..., на выходе логического элемента НЕ 76 - сигнал. Сигналы Xi,...,X5. Yi,...,Yio; Zi,..,Zg; Vi,.,,V7. принимают два дискретных значения 0 и 1.
Возможные виды состояний логических элементов приведены в таблицах 1-5. Гидромотор 7 может быть выполнен нерегулируемым и регулируемым, например, регулируемым по давлению. На выходе датчика 22 давления существует сигнал Хз 1 при наличии груза 12, вес которого больше или равен заданному настройкой датчика 22 давления, иХб 0, если вес груза 18 меньше заданного. На выходе элементов 55, 56 выдержки времени возникают сигналы 2.г - ZG 1 лишь через время ti и t2 выдержки времени после подачи на их вход соответственно сигналов YI YS 1, причем время г больше времени ti. На выходе элемента 78 выдержки времени появляется сигнал V4 1 лишь через время t3 выдержки времени после подачи на его вход сигнала Zs 1. Входы 24, 25, 30, 31 управления трехпози- ционными гидрораспределителями 23, 29, а также автомата 21 разгрузки могут представлять собой электромагниты. Автомат 21 разгрузки может быть выполнен в виде предохранительного клапана непрямого действия с разгрузочным гидрораспределителем (не обозначены).
Элементы 55, 56, 78 выдержки времени могут представлять собой реле времени, элементы задержки сигнала и пр.
Гидросистема грузоподъемного крана
работает следующим образом.
Для установки под требуемым углом стрелы 3 включают насосы 14 и 15 и нажимают кнопку 38 Подъем стрелы кнопочной станции 37 пульта 4 управления. Сигнал
Хз 1 по линии 43 управления поступает ко входам логических элементов И 48 и И 58 логического блока 46 управления. Так как нагрузка отсутствует, контакты датчика 22 давления разомкнуты и сигнал Xs 0. Благодаря этому сигналы на выходах логических элементов И 48 YS 0 (см. таблицу 2), НЕ 61 Ys 1 (см. таблицу 5), И 58 Y2 1 (см. таблицу 2), ИЛИ 51 ZA 1 (см. таблицу 1). С выхода элемента ИЛИ 51 сигнал ZA - 1 поступает на
вход логического элемента И 70. Так как сигнал на входе 30 управления отсутствует, Zg 0, то сигнал на выходе логического элемента НЕ 71 Уб 1 (см. таблицу 5), сигнал от логического элемента И 70 У 1 (см. таблицу 2) поступает на вход 24 управления, который переключает гидрораспределитель 23 в правую позицию. Гидроцилиндр 6 раздвигается, осуществляя подъем стрелы 3.
При нажатии на кнопку 39 Стоп сигналы в линиях 43, 44 управления Хз ХА О, сигнал Y2 О, 2.U, 0 (см. таблицу 1, 2). благодаря чему гидрораспределитель 23 устанавливается в среднюю позицию и подъем стрелы 3 прекращается.
Для опускания стрелы нажимают кнопку 40 Опускание стрелы пульта 4 управления. Сигнал Xi 1 по линии 44 управления поступает к входу 25 управления. Гидрораспределитель 23 переключается в левую позицию. Так как сигналы YI Хз 0. сигналы на выходе логических элементов НЕ 72 и 73 дополнительного логического блока 65 управления Yy Ze 1 (см. таблицу 5). Однако, так как груз отсутствует, контакты датчика
22 давления разомкнуты, сигналы Xs 0. Уз 0 (см. таблицу 3), Z5 Z 0(cM. таблицу 1). Автомат 21 разгрузки заперт. Рабочая жидкость от насосов 14 и 15 поступает к гидроцилиндру 6, который осуществляет
опускание стрелы 3.
После этого опускают крюк. Оператор нажимает кнопку 36 Опускание груза на пульте управления 4, сигнал Х2 1 по линии управления 42 поступает к входу 31 управления. Гидрораспределитель 29 переключается в левую позицию, благодаря чему гидромотор 7 через редуктор 8 вращает барабан 9 и осуществляется опускание крюка (фиг. 1).
Далее закрепляют на крюке груз 12 и нажимают кнопку 34 Подъем груза на пульте 4 управления.
Сигнал Xi 1 по линии 41 управления поступает к логическому элементу ИЛИ 50 логического блока 46. С выхода этого элемента сигнал YI 1 (см. таблицу 1) поступает к блоку 63 задержки, который пропускает этот сигнал без задержки при переключении входного сигнала YI с 0 на 1 и задержи- вает сигнал на время тз при переключении входного сигнала YI с 1 на 0, к логическому элементу И 66. При изменении сигнала YI с YI 0 на YI 1 сигнал на выходе логического элемента НЕ 75 Zs 0 (см. таблицу 5), сигнал на выходе логического элемента И 77 Vs О (см. таблицу 2), сигнал на выходе логического элемента НЕ 76 U 1 (см. таблицу 5). Блок 63 не осуществляет задержку входного сигнала при переключении его с 0 на 1.
Так как контакты датчика 22 разомкнуты, сигнал Xs 0, а сигнал на выходе логического элемента НЕ 65 YI 1 (см. таблицу 5). Так как при этом сигнал YI 1, то сигналы на выходах логических элементов И 66, 69 Yg 1, Yio 0 (см. таблицу 2), сигнал Zg 1 (см. таблицу 1) поступает к входу 30 управления, который переключает гидрораспределитель 29 в правую позицию.
Рабочая жидкость от насосов 14 и 15 поступает к гидромотору 7, который начинает наматывать трос 10 на барабан 9 лебедки 2 пока не повысится давление в поршневой полости гидроцилиндра 6 стрелы 3. Одновременно сигнал YI 1 поступает на входы логического элемента И 47 и элемента 55 выдержки времени логического блока 45.
Если вес груза 12, закрепленного на крюке, незначителен, то на выходе датчика 22 давления сигнал Xs 0, на выходах логических элементов И 47 и 57 сигналы Y Zs 0 (см. табл. 2). Автомат 21 разгрузки не разгружает насос 15 от давления и подъем груза 12 осуществляется при подводе к гид- ромотору 7 суммарной подачи насосов 14 и 15.
Если же вес груза 12 таков, что замыкаются контакты датчика 22 давления, то сиг- нал Xi 1 поступает на второй вход логического элемента И 47, сигнал Y4 1 подводится к входу логического элемента И 57. Так как на выходе элемента 55 выдержки времени сигнал 7.2 - 1 появляется лишь через время после подачи сигнала YI 1, сиг- налы Z2 0, Vi 1 (см. таблицу 5), Zs 1 (см. таблицу 2) и автомат 21 разгрузки соединяет напорную гидролинию 17 насоса 15с гидробаком 13 в момент начала подъема груза 12 грузовой лебедкой 2. Осуществляется плавное трогание с места и подъем груза 12 с малой скоростью.
При замкнутых контактах датчика 22 давления сигнал на вход 30 управления гидрораспределителя 29 с логического блока 46 (Yi 1) передается через блок 63 задержки (при переключении сигнала YI с YI 0 на YI 1 этот элемент не осуществляет задержки сигнала.
Через время t.i сигнал на выходе элемента 55 выдержки времени 7л 1, сигналы Vi 0 (см. таблицу 5), Zs 0 (см. таблицу 2).
Для отключения разгрузки насоса 15 необходимо, чтобы на втором входе логического элемента ИЛИ 68 был нулевой сигнал. Так как сигнал YI 1, то на выходе логического элемента Н Е 72 сигнал Ze О (см. таблицу 5). тогда сигнал /з 0 (см. таблицу 3). Таким образом, на все входы логического элемента ИЛИ 68 сигналы не поступают (Zs 0, Va 0) и автомат 21 разгрузки насоса 15 отключается.
Суммарная подача насосов 14 и 15 подводится к гидромотору 7, осуществляя дальнейшее плавное увеличение скорости подъема груза 12. Если гидромотор 7 выполнен регулируемым, например по давлению, то он обеспечивает дополнительное регулирование скорости движения в зависимости от веса груза 12, а, следовательно, еще большую плавность движения.
Остановка и опускание груза 12 обеспечивается при нажатии кнопок и 36 Опускание груза на пульте 4 управления. При этом в линиях 41, 42 управления поступают соответственно сигналы Xi Х2 0 и Xi 0, .
При разомкнутых контактах датчика 22 давления (вес груза 12 незначителен) и подаче сигнала Xi Х2 0, сигнал на выходе логического блока 46 управления YI О, сигнал Yg 0 (см, таблицу 2), благодаря чему сигнал YIO 0 (см. таблицу 1) поступает на вход 30 управления гидрораспределителя 29 без задержки.
При замкнутых контактах датчика 22 давления (вес груза 12 значителен)сигнал Xs 1 и подаче сигнала Xi Х2 0 сигнал YI 0 поступает на вход блока 63 задержки. Сигнал на выходе элемента НЕ 75 Zs 1 поступает на вход элементов И 77 и выдержки времени 78. Элемент 78 выдержки времени задерживает входной сигнал на время t3. Поэтому в течение времени тз сигналы 0, Vg 0 (см. таблицу 2), U 1 (см. таблицу 5), Yio 1, Zg 1 (см. таблицу 2 и 1) и гидрораспределитель 29 устанавливается в нейтральное положение с задержкой на время ts после нажатия кнопки 35 пульта 4 управления. Одновременно с нажатием
кнопки 35, так как Xi YI 0, сигналы на выходах логических элементов НЕ 72 и 73 Y Ze 1 (см. таблицу 5), сигнал Vs 1 (см, таблицу 2) и остановка подъема грузовой лебедки 2 осуществляется при разгружен- ном насосе 15.
При опускании груза 12 значительного веса (Хб 1) грузовой лебедкой 2 сигналы YI , Y7 Ze 1 (см; таблицу 5) сигнал на выходе логического элемента И 74 Va 1 (см. таблицу 3), сигнал Z 1 (см. таблицу 1) и опускание осуществляется при разгруженном насосе 15.
Если требуется осуществить подъем груза 12 стрелой 3, то нажимают кнопку 38 Подъем стрелы пульта 4 управления. Если вес груза 12 невелик, то на выходе датчика 22 давления вырабатывается сигнал Xs 0 и работа механизма подъема стрелы 3 (подъем, остановка и спуск) осуществляется так же, как это было описано выше.
Если же вес груза 12 значителен, на выходе датчика 22 давления вырабатывается сигнал Xs 1, который поступает на входы логических элементов И 48, 49 и НЕ 61 логи- ческого блока 46 управления. Так как сигнал Хз 1, то сигнал Уз 1 (см. таблицу 2) поступает на входы логического элемента И 59 и элемента 56 выдержки времени. В начальный момент сигнал Zs 0, сигнал Ye 0 (см. таблицу 2), V2 1 (см. таблицу 5); Zi 1 (см. таблицу 2).
Сигнал YI 1 (см. таблицу 1) с выхода логического элемента ИЛИ 50 логического блока 46 управления поступает к блоку 63 задержки, который, как было показано выше, при переключении входного сигнала YI с 0 на 1 не осуществляет задержки и потому сигнал U 1, Ую 1 (см. таблицу 2) и Zg 1 (см. таблицу 1).
Сигналом на входе 30 гидрораспределитель 29 переключается в правую позицию. Сигнал YI 1 также поступает на вход логического блока 45 управления. Благодаря этому осуществляется подъем груза 12 грузовой лебедкой 2 в режиме подвода к гидромотору 7 подачи насоса 14, а затем через время ti суммарной подачи насосов 14 и 15, что было описано выше. Так как сигнал Xs 1, сигнал на выходе логического
элемента НЕ 61 Ys 0 (см. таблицу 5), Y2: О (см. таблицу 2). Поскольку при этом сигнал YG 0, то сигналы Za, 0 (см. таблицу 1), V 0(см. таблицу 2) и гидрораспределитель 23 находится в средней позиции.
Через время ta настройки элемента 56 выдержки времени сигнал 7з 1 подается на входы логических элементов НЕ 62 и И 49. Сигналы V2 0 (см. таблицу 5), Zi 0 (см. таблицу 2), YI 0 (см. таблицу 1). С выдержкой времени на величину t3 (под действием пружины) гидрораспределитель 29 переключается в среднюю позицию, а гидромотор 7 останавливается.
Так сигналы Xs Za 1, сигналы Ye 1 (см. таблицу 2), Z4 1 (см. таблицу 1). При сигнале Zg 0, сигнал на выходе логического элемента НЕ 71 Ve 1 (см. таблицу 5), сигнал на выходе логического элемента И 70 V 1 (см, таблицу 1) и гидрораспределитель 23 переключается в правую (см. фиг. 2) позицию. Осуществляется дальнейший подъем груза 12 значительного веса механизмом подъема стрелы 3. Для остановки подъема груза 12 стрелой 3 нажимают на кнопку 39 пульта 4 управления. Сигналы Хз Х4 0. Сигнал YS 0 (см. таблицу 2) с логического элемента И 48 задерживается элементом 56 выдержки времени на время t2. Поэтому в течение времени t2 задержки осуществляется дальнейший подъем груза 12 механизмом подъема стрелы 3, но с меньшей скоростью, так как в этом случае сигналы Хз YI 0 (см. таблицу 2 и 1), сигнал на выходе дополнительного логического блока 65 /з 1 и автомат 21 разгрузки соединяет гидролинию 17 с гидробаком 13,
Опускание груза 12 значительного веса стрелой 3, как и лебедкой 2 осуществляется также при разгруженном насосе 15 (сигналы X5 V3 ).
Дроссели с обратными клапанами 27, 28, 32 обеспечивают заданные скорости движения при подъеме, опускании стрелы 3 и опускании груза 12. Гидрозамок 26 предотвращает самопроизвольное опускание стрелы 3 при нейтральном положении гидрораспределителя 23. Клапан 20 и автомат 21 разгрузки защищают гидросистему от перегрузки
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема грузоподъемного крана | 1991 |
|
SU1765542A1 |
| Гидравлический привод автомобильного подъемника | 1991 |
|
SU1789787A1 |
| Электрогидравлическая система управления выносными опорами самоходной площадки обслуживания высокорасположенных объектов | 1991 |
|
SU1837125A1 |
| Гидросистема грузового крана | 1989 |
|
SU1689673A1 |
| Электрогидравлическая система поворота платформы самоходного транспортного средства | 1990 |
|
SU1732011A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство для контроля положения вилочного грузозахвата относительно грузоподдона | 1983 |
|
SU1168905A1 |
| Рекуперативный гидропривод одноковшового экскаватора | 1989 |
|
SU1684442A1 |
| Устройство управления групповым гидроприводом | 1989 |
|
SU1707290A1 |
| Система орошения | 1987 |
|
SU1521400A1 |
Формула изобретения
1, Гидросистема грузоподъемного крана, содержащая насосную станцию с двумя насосами, подключенную к управляемому автомату разгрузки и через параллельно включенные управляемые трехпозиционные четырехлинейные гидрораспределители - к гидравлическим механизмам лебедки и подъема стрелы, а также датчик давления последнего и схему регулирования с кнопочными станциями управления и с первым и вторым логическим блоками управления, подключенными к соответствующим кнопкам, отличающаяся тем, что, с целью повышения быстродействия и надежности, а также расширения функциональных возможностей, она снабжена дополнительными логическим блоком управления, блоком задержки, последовательно соединенными первым логическим элементом НЕ, первым логическим элементом И и первым логическим элементом ИЛИ, а также вторым и третьим логическими элементами И, вторым логическим элементом НЕ и вторым логическим элементом ИЛИ, при этом датчик давления через указанные последовательно соединенные первые логические элементы связан с одним входом управления гидрораспределителя механизма лебедки, вход и выход блока задержки связаны с вторым логическим блоком и с вторым входом первого элемента ИЛИ соответственно, причем остальные входы дополнительного логического блока связаны со станциями управления и датчиком давления, один из входов первого элемента И соединен с вторым логическим блоком, а выход дополнительного логического блока через второй элемент ИЛИ связан с входом управления автомата
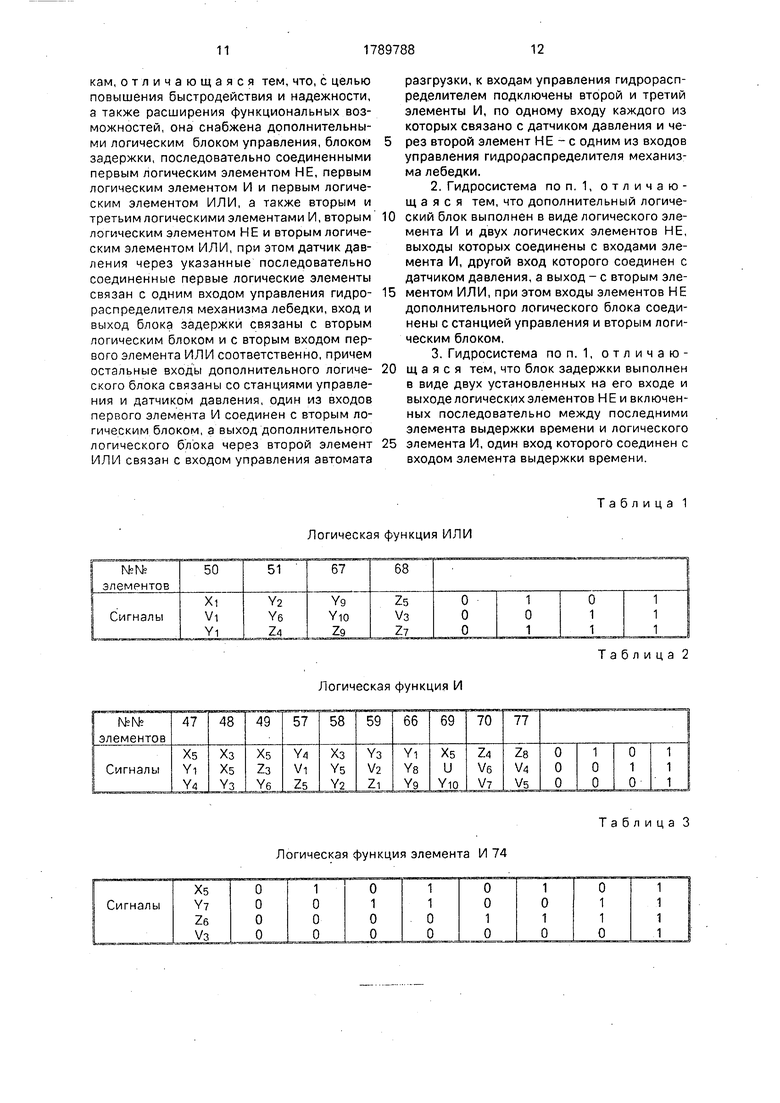
Логическая функция ИЛИ
Логическая функция И
Логическая функция элемента И 74
разгрузки, к входам управления гидрораспределителем подключены второй и третий элементы И, по одному входу каждого из которых связано с датчиком давления и че- рез второй элемент НЕ - с одним из входов управления гидрораспределителя механизма лебедки.
Таблица 1
Таблица 2
Таблица 3
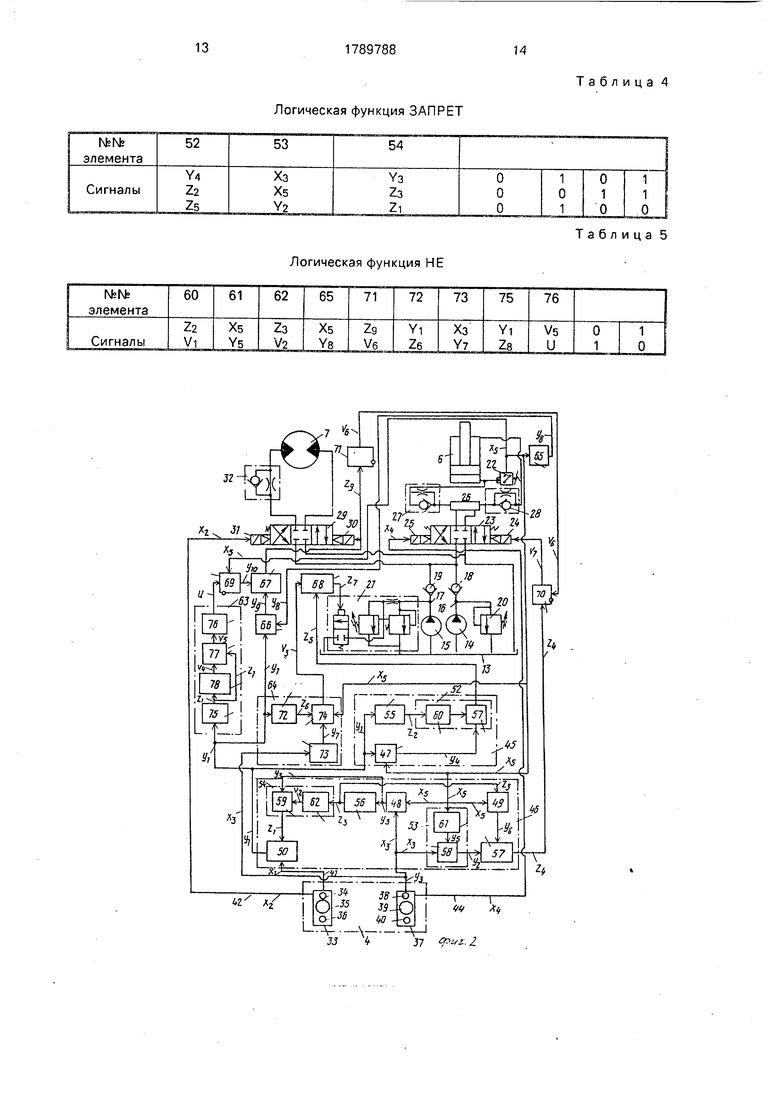
Логическая функция ЗАПРЕТ
Логическая функция НЕ
Таблица 4
Таблица 5
