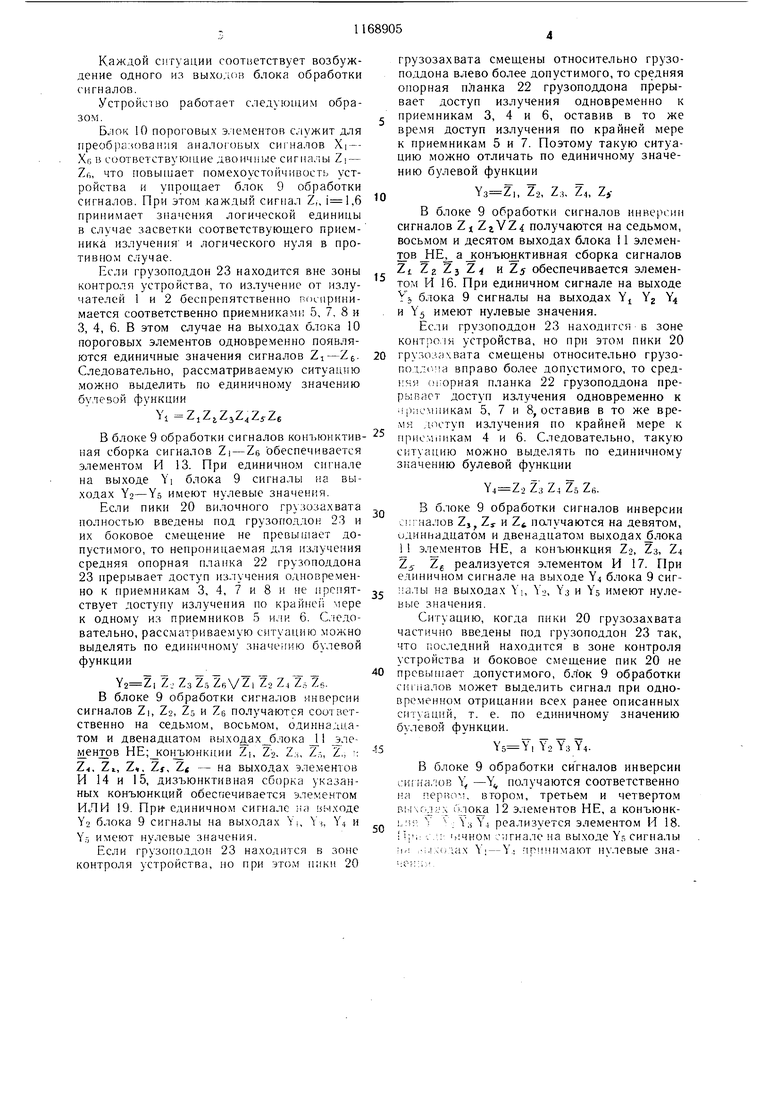
О5 00 СО Изобретение относится к контрольным устройствам для подъемно-транспортного оборудования, а именно напольных вилочных погрузчиков, и может быть использовано при построении автоматизированных систем управления погрузо-разгрузочными средствами. Цель изобретения - упрощение устройства для контроля положения вилочного грузозахвата относительно грузоподдона с непроницаемой для излучения средней опорной планкой за счет исключения установки его элементов на грузоподдоне. На фиг. 1 представлено устройство для контроля положения вилочного грузозахвата относительно грузоподдона, общий вид; на фиг. 2 - функциональная схема блока обработки сигналов. Устройство содержит излучатели 1 и 2 (например, электрические лампочки), направленные приемники 3-8 излучения (например, фоторезисторы в тубусах) и блок 9 обработки сигналов, который состоит из блока 10 пороговых элементов (триггеров Шмидта), двух блоков 11 и 12 логических элементов НЕ, логических элементов И 13- 18, логического элемента ИЛИ 19. Излучатели 1 и 2 закреплены соответственно у концов пик 20.1 и 20.2 вилочного грузозахвата с внутренней стороны. Приемники 3-8 закреплены на спинке 21 вил грузозахвата над плоскостью XOY вил на высоте, меньшей высоты, непроницаемой для излучения средней опорной планки грузоподдона, и так, что обеспечивается оптическая связь приемников 5, 7 и 8 с излучателем 1 и приемников 3, 4 и 6 с излучателем 2. Приемники 3 и 8 укреплены на равных расстояниях от плоскости симметрии XOZ грузозахвата у боковых краев спинки 21 вил. Приемники 4 и 7 установлены по обе стороны плоскости симметрии XOZ грузозахвата на расстоянии наибольшего допустимого бокового смещения пик 20 грузозахвата относительно средней опорной планки 22 грузоподдона 23 при полном введении вил под грузоподдон. Приемники 5 и 6 установлены между приемниками 4 и 7 на равных расстояниях от плоскости симметрии XOZ грузозахвата. Выходы приемников 3- 8 связаны соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами блока 10 пороговых элементов. Первый, второй, третий, четвертый, пятый и шестой выходы блока 10 пороговых элементов соответственно связаны с первым, вторым, третьим, четвертым, пятыми и шестыми входами блока 1 1 элементов НЕ и элемента И 13. Кроме того, второй выход блока 10 пороговых элементов связан с первым входом элемента И 17, третий выход - с третьими входами элементов И 14 и 16, четвертый выход - с третьими входами элементов И 15 и 17, пятый выход - с пятым входом элемента И 16. Первый и второй выходы блока 1 1 элементов НЕ связаны соответственно с первыми и вторыми входами элементов И 14-16, третий выход - с вторым входом элемента И 17, четвертый выход - с четвертым входом элемента И 16, пятый и шестой выходы - соответственно с четвертыми и пятыми входами элементов И 14, 15 и 17. Выход элемента И 14 связан с первым входом элемента ИЛИ 19, его второй вход - с выходом элемента И 15. Выходы элементов И 13, ИЛИ 19, И 16 и 17 связаны соответственно с первым, вторым, третьим и четвертым входами блока 12 элементов НЕ. Первый, второй, третий и четвертый вы-ходы блока 12 элементов НЕ связаны соответственно с первым, вторым, третьим и четвертым входами элемента И 18. Первым, вторым, третьим, четвертым и пятым выходами блока 9 обработки сигналов и всего устройства являются соответственно выходы элементов И 13, ИЛИ 19, И 16-18. Сигналы на выходах приемников 3-8 излучения обозначены соответственно через Xi-Хб. сигналы на первом, втором, третьем, четвертом, пятом и шестом выходах блока 10 пороговых элементов - соответственно через Zi-Ze, сигналы на первом, втором, третьем, четвертом и пятом выходах устройства - соответственно через . При таком конструктивном решении все блоки устройства расположены на контролируемом вилочномгрузозахвате. В плоскости, определяемой линиями визирования от излучателей к приемникам излучения, за счет направленности последних организована сигнальная лучевая сеть с характеристикой пересечения компараторного типа. Всевозможные ситуации допустимых и недопустимых боковых смещений грузозахвата при причаливании к грузоподдону или отчаливании от него, а также ситуации полного и правильного введения вил под грузоподдон, приводящие к нарушению лучевой сети, представляются различными комбинациями сигналов на входах блока обработки сигналов. Блок обработки сигналов отождествляет различные комбинации входных сигналов с одной из следующих ситуаций положения вилочного грузозахвата относительно грузоподдона: смещение вил грузозахвата не контролируется из-за чрезмерной удаленности грузоподдона; вилы грузозахвата полностью введены под грузоподдон, и смещение их превышает допустимое смещение; вилы грузозахвата смещены относительно грузоподдона влево более допустимого смещения; вилы грузозахвата смещены относительно грузоподдона вправо более допустимого смещения; вилы грузозахвата введены под грузоподдон неполностью, и их боковое смещение не превышает допустимого смещения. Каждой ситуации соответствует возбуждение одного из выходов блока обработки сигналов. Устройство работает следующим образом. Блок 10 пороговых э.чементов служит для преобразования аналоговых сигналов Х| - Хб в соответствующие двоичные сигиалы Zj - Zfi, что иовы1иает помехоустойчивость устройства и упрощает блок 9 обработки сигналов. При это.м каждый сигнал Z,, ,6 принимает значеиия логической единицы в случае засветки соответствующего приемника излучения и логического нуля в против юм случае. Если грузоподдон 23 находится вне зоны контроля устройства, то излучение от излучателей 1 и 2 беспрепятственно поспринимается соответственно приемниками 5, 7, 8 и 3, 4, 6. В этом случае на выходах блока 10 пороговых элементов одновременно появляются единичные значения сигналов Zi-Zj. Следовательно, рассматриваемую ситуацию можно выделить по единичному значению булевой функции YI .Z isZf В блоке 9 обработки сигналов конъюнктивная сборка сигналов Zi - Zr, обеспечивается элементом И 13. При единичном сигнале на выходе YI блока 9 сигналы на выходах Уо-YS имеют нулевые значения. Если пики 20 вилочного грузозахвата полиостью введены иод грузоподдон 23 и их боковое смещение не превышает допустимого, то непроницаемая для излучения средняя опорная планка 22 грузоподдона 23 прерывает доступ излучения одновременно к приемникам 3, 4, 7 и 8 и не препятствует доступу излучения но крайней мере к одному из приемников 5 или 6. Следовательно, рассматриваемую ситуацию можно выделять по единичному значению булевой функции Z, Zs Z. ZGVZi Z, 1, Zg. В блоке 9 обработки сигналов инверсии сигналов Zi, 2-2, 7.-, и Zg получаются соответственно на седьмом, восьмом, одирщадцатом и двенадцатом выхо,д ах блока J1 лементрв НЕ; коргьюнкции Z|, Zg. Z.i, Zs, Z,, -. ZA. Zi, Z, Zf, Zt - на выходах элементов И 14 и 15, дизъюнктивная сборка указанных конъюнкций обеспечивается элементом ИЛИ 19. Пр№ единичном сигнале }i;i выходе Y2 блока 9 сигналы на выходах Yi, i, Y4 и YS имеют нулевые значения. Если грузоподдон 23 находится в зоне контроля устройства, по при этом пики 20 грузозахвата смещены относительно грузоподдона влево более допустимого, то средняя опорная цланка 22 грузоподдона прерывает доступ излучения одновременно к приемникам 3, 4 и 6, оставив в то же время доступ излучения по крайней мере к приемникам 5 и 7. Поэтому такую ситуацию можно отличать по единичному значению булевой функции , Z-2, Z:j, Z4, ZjВ блоке 9 обработки сигналов инверсии сигналов Z ZjVZ получаются на седьмом, восьмом и десятом выходах блока 11 элементов НЕ а кoнъюJ ктивнaя сборка сигналов Zi и Zs обеспечивается элементом И 16. При единичном сигнале на выходе УЗ блока 9 сигналы на выходах Yj Yg Y4 и Y имеют нулевые значения. Если грузоподдон 23 находится в зоне контроля устройства, но при этом пики 20 грузе.;-)хвата смещены относительно грузопо:;лд:й вправо более допустимого, то сред1 чя опорная планка 22 грузоподдона прерывает доступ излучения одновременно к ч хюмиикам 5, 7 и 8, оставив в то же время Л11ступ излучения по крайней мере к приемникам 4 и 6. Следовательно, такую ситуацию можно выделять по единичному значению булевой функции Y4 Z2 Z;j 7.4 Zn Zfi. в блоке 9 обработки сигналов инверсии сигналов Zj, Zj- и Zf, патучаются на девятом, одиннадцатом и двенадцатом выходах блока 1 эл ементов НЕ, а конъюнкция Zo, Zs, Z Zs Z реализуется элементом И 17. При единичном сигнале на выходе Y4 блока 9 сигналы на выходах YI, YU, Yj и YS имеют нулевые значения. Ситуацию, когда пики 20 грузозахвата частично введены под грузоподдон 23 так, что последний находится в зоне контроля устройства и боковое смещение пик 20 не превьциает допустимого, бЛок 9 обработки сигналов может выделить сигнал при одновременном отрицании всех ранее описанных ситуаций, т. е. по единичному значению булевой функции. Y2Y3Y4. В блоке 9 обработки сигналов инверсии сигналов X -Y получаются соответственно на nepiuv.i, втором, третьем и четвертом вычг.лух 1уока 12 элементов НЕ, а конъюнк. : Y;i Y4 реализуется элементом И 18. ihii: , .; 1 ;чном сигнале на выходе YS сигналы ii.i :;. апах Y; - Y-1 принимают нулевые зна9
Вы)(оды устройства
А
Г
/К А ф f ф
Ш Uz Уз + 5
X/ 2 АЗ Х Kg )(s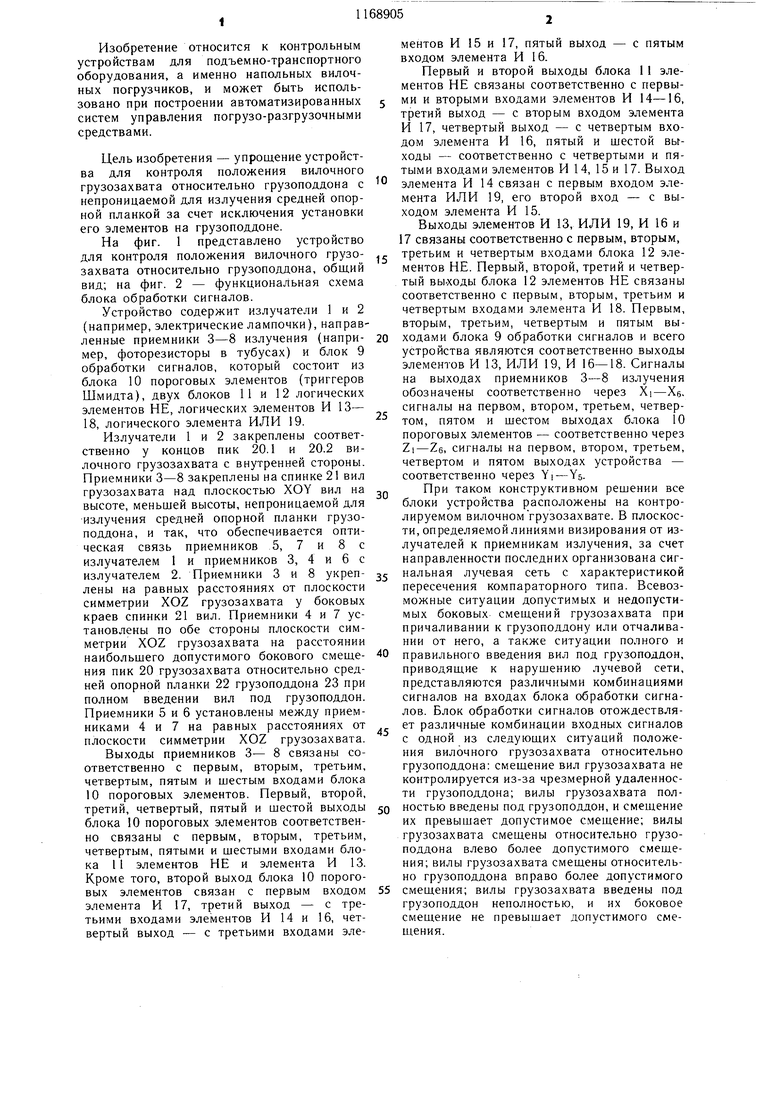
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный логический модуль | 1989 |
|
SU1665368A1 |
| Устройство для вычисления симметрических булевых функций | 1989 |
|
SU1684792A1 |
| СПОСОБ ПОМОЩИ ВОДИТЕЛЯМ ПРИ ПЕРЕСТРОЕНИЯХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2646782C2 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| Устройство измерения формы произвольной отражающей поверхности антенной системы | 2020 |
|
RU2725030C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Устройство для формирования изображения | 1988 |
|
SU1575230A1 |
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЦИФРОВЫХ СХЕМ | 1992 |
|
RU2042196C1 |
| Многофункциональный логический модуль | 1986 |
|
SU1310800A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ВИЛОЧНОГО ГРУЗОЗАХВАТА ОТНОСИТЕЛЬНО ГРУЗОПОДДОНА, содержащее оптически связанные основные излучатель и три приемника излучения, выходы которых подключены к соответствующим входам блока обработки сигналов, отличающееся тем, что, с целью упрощения устройства, оно содержит дополнительные оптически связанные излучатель, закрепленный на внутренней стороне одной из пик вилочного грузозахвата у ее свободного конца, и три приемника излучения, закрепленные на спинке вил грузозахвата над плоскостью вил на высоте, меньщей высоты, непроницаемой для излучения средней опорной планки грузоподдона, первый и второй из которых расположены соответственно у бокового края спинки вил и на расстоянии предельно допустимого бокового смещения грузоподдона относительно плоскости симметрии грузозахвата со стороны, противоположной размещению дополнительного излучателя, третий приемник излучения расположен ближе второго к плоскости симметрии грузозахвата со стороны расположения дополнительного излучателя, выходы всех дополнительных приемников излучения подклюS SS чены к соответствующим входам блока обработки сигналов, а основные излучатель (Л и приемники излучения закреплены на вилочном грузозахвате симметрично одноименным дополнительным излучателю и приемникам излучения.
(риг.г
| Система управления положением судна в доке | 1978 |
|
SU750443A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для дистанционного контроля положения объектов | 1980 |
|
SU883875A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
