сл
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сопряжения каналов ввода-вывода с внешними устройствами | 1985 |
|
SU1277128A1 |
| Устройство для сопряжения | 1990 |
|
SU1753478A1 |
| Акустооптический спектроанализатор | 1986 |
|
SU1355939A1 |
| Распределенная система для программного управления технологическими процессами | 1990 |
|
SU1797096A1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО ИЗОБРАЖЕНИЙ | 1990 |
|
RU2047921C1 |
| Устройство для сопряжения | 1989 |
|
SU1709324A2 |
| Устройство автоматического получения и обработки изображений | 2019 |
|
RU2707714C1 |
| Распределенная система управления | 1989 |
|
SU1732345A1 |
| Матричный распределитель | 1987 |
|
SU1580377A1 |
| Дешифратор координатно-моторной активности для биотехнического адаптируемого контроллера | 1991 |
|
SU1836677A3 |
Изобретение относится к вычислительной технике и может быть использовано в информационно-управляющих системах для коммутации и ввода информации от датчиков с дискретными выходными сигналами в ЭВМ, выполненных на основе микропроцессоров КР580ВМ80 и КР1810ВМ86. Цель изобретения - повышение достоверности вводимой в ЭВМ устройством информации за счет организации контроля работоспособности цепей ввода. Устройство содержит программируемый контроллер клавиатуры и дисплей, регистр, элементы И, элементы ИЛИ, элементы ИЛИ-НЕ, датчики. Устройство позволяет ЭВМ осуществлять программный контроль исправности контроллера и каналов ввода информации. 1 ил.
Изобретение относится к вычислительной технике и может быть использовано в информационно-управляющих системах для ввода информации от датчиков с дискретными выходными сигналами в ЭВМ, выполненных на основе микропроцессоров КР580ВМ80 и К1810ВМ86.
Известно устройство, содержащее формирователь, узел управления, дешифратор адреса, предназначенные для ввода в ЭВМ информации от датчиков с дискретным выходом двумя группами по 8 датчиков.
Недостатком этого устройства является невозможность контроля по программе ЭВМ исправности каналов ввода дискретных сигналов, что снижает достоверность вводимой в ЭВМ информации.
Известно также устройство, содержащее M.N датчиков с дискретным выходом,
два блока управления с ключами, разделительные диоды,оптроны.
Недостатком этого устройства является то, что повышение надежности и достоверности контроля обеспечивается за счет дополнительного резервирования блока управления, что увеличивает стоимость устройства; к недостаткам можно отнести и отсутствие возможности диагностики устройства ЭВМ программным путем.
Наиболее близким по технической реализации к предлагаемому изобретению является устройство, содержащее матрицу датчиков с дискретным выходом по N датчиков в строке и М датчиков в столбце, программируемый контроллер клавиатуры и
. дисплея КР580ВВ79, число используемых входов клавиатурной части которого равно числу строк матрицы датчиков, число используемых выходов сканирования равно
VI Ю
00
о
00
числу столбцов матрицы датчиков, выходы канала данных, синхронизации, сброса, записи, считывания, идентификации, выбора микросхемы соединены с соответствующими линиями системной шины ЭВМ, а выходы регистров ОЗУ отображения, гашения отображения, ввода по стробу, состояния сигналов регистр не используется.
В известном техническом решении не предусмотрена возможность программного контроля ЭВМ этого устройства, что снижает достоверность вводимых через него в ЭВМ данных. С другой стороны, в режиме сканирования матрицы датчиков дисплейная часть контроллера не задействована. Однако непосредственное использование выходов дисплейной части микросхемы для контроля клавиатурной части невозможно из-за того, что изменение информации на выходах дисплейной части по времени совпадает с вводом информации в клавиатурную часть контроллера.
Целью изобретения является повышение достоверности вводимой в ЭВМ устройством информации за счет организации контроля работоспособности цепей ввода.
Цель достигается тем, что в устройство, содержащее матрицу датчиков с дискретным выходом по N датчиков с дискретным выходом в строке и М датчиков с дискретным выходом в столбце, программируемый контроллер клавиатуры и дисплея, информационный вход-выход, выход признака ввода информации, входы тактовый, установки в ноль,управления чтением, управления записью, идентификации данных и выборки которого соединены соответственно с одноименным входом-выходом, выходами и входами устройства для подключения к электронной вычислительной машине, дополнительно введены N М элементов И, N М элементов И-НЕ, регистр и N М элементов ИЛИ, причем выход L-ro датчика с дискретным выходом (, N -N) соединен с прямым входом L-ro элемента И, выход которого соединен с первым входом L-ro элемента ИЛИ, выход которого соединен с прямым входом L-ro элемента И-НЕ, К-й (, М) информационный выход программируемого контроллера соединен с К-м информационным входом регистра, К-й выход которого соединен с вторыми входами с((К-1) (N+1)-ro по К N-й элементов ИЛИ, инверсные входы с первого по N М-й элементов И и вход разрешения выхода регистра соединены с 8-м информационным выходом программируемого контроллера, Р-й ( N) выход сканирования
которого соединен с инверсными входами (М(К-1)+р)-х элементов И-НЕ (. М), выход признака гашения изображения программируемого контроллера соединен с
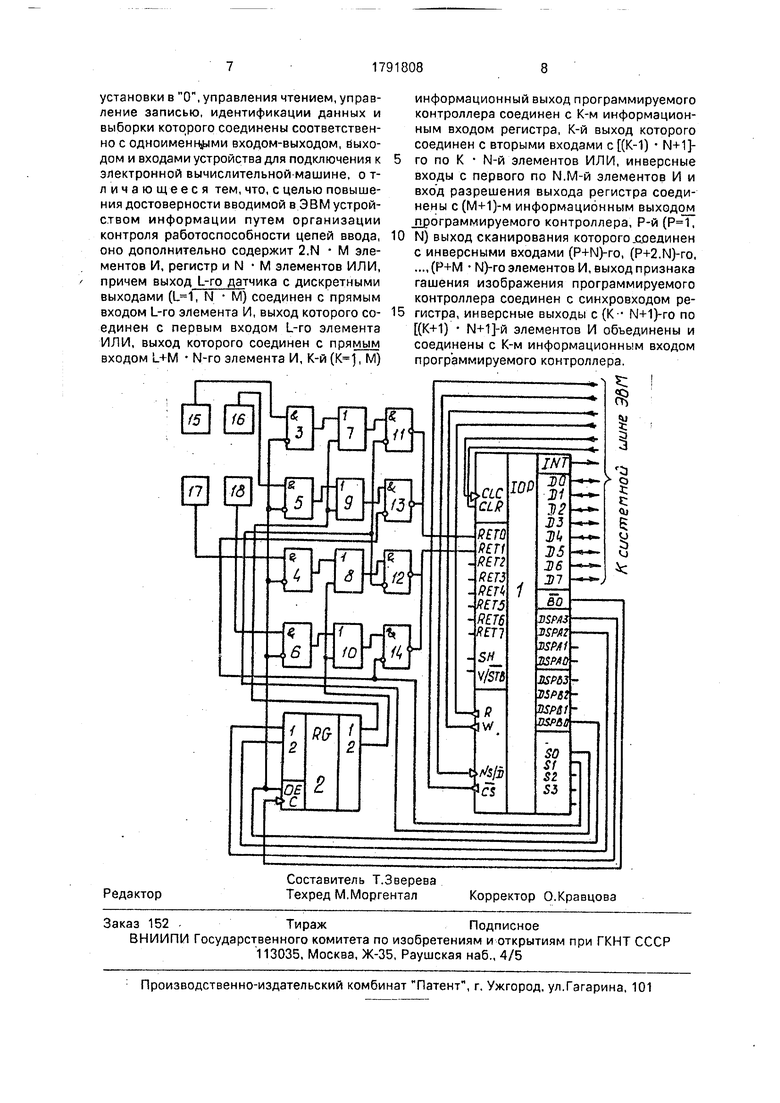
синхровходом регистра, R-й (, M) информационный вход программируемого контроллера соединен с выходами с ((R-1) N+1)-ro no (R М)-й элементов И-НЕ. Принцип работы изобретения рассмот0 рим на примере реализации устройства для ввода информации от четырех датчиков с дискретным выходом, функциональная схема которого изображена на чертеже.
Схема содержит программируемый ком5 троллер клавиатуры и дисплея (микросхема типа КР580ВВ79) 1; регистр 2, предназначенный для хранения контрольного кода для проверки исправности устройства; элементы И 3-6; элементы ИЛИ 7-10; элементы
0 ИЛИ-НЕ 11-14; датчики с дискретным выходом 15-18, которые образуют матрицу датчиков 2x2 (по два датчика в строке и по два датчика в столбце). Информация от датчиков поступает на входы клавиатурной части кон5 троллера 1 по четырем каналам, каждый из которых содержит по одному элементу И, ИЛИ, И-НЕ, Первый канал содержит элементы ИЗ, ИЛИ7, И-НЕ11, второй И4, ИЛИ8, И-НЕ12, третий И5, ИЛИ9,-И-НЕ13, четвер0 тый И6, ИЛИЮ, И-НЕ14. Первый и третий каналы подключены по схеме монтажное ИЛИ к входу RETO контроллера, а второй и четвертый - к входу RET1. Обмен информацией с ЭВМ осуществляется через двунап5 равленную шину данных, подключенную к входам DO-D7 контроллера. Идентификация сигналов на входах DO-D7 микросхемы осуществляется сигналом команда/данные, который поступает на вход NS/D мик-
0 росхемы. Ввод информации в микросхему осуществляется при подаче сигналов W (Запись) и CS (Выбор микросхемы). Вывод информации из микросхемы осуществляется при подаче сигналов R (Чтение) и СЗ (Вы5 бор микросхемы). Выход 1NT микросхемы подключен к входу прерывания ЭВМ. Синхронизация микросхемы осуществляется от генератора тактовых импульсов ЭВМ, Входы микросхемы SH и V/STB не используются.
0 Для задания режима контроля состояния датчиков ЭВМ с помощью команды Сброс осуществляет программный сброс микросхемы и устанавливает нулевые сигналы во всех разрядах ОЗУ отображения и
5 на выходах микросхемы DSPBO-DSPB3, затем с помощью команды Программирование синхронизации ЭВМ задает необходимую скорость сканирования матрицы датчиков и ОЗУ отображения.
После этого ЭВМ командой Установка режимов работы клавиатуры - дисплея задает режим дешифрованного сканирования матрицы датчиков. В этом режиме микросхема осуществляет сканирование (опрос) с заданной скоростью входов RETO-RET7, на которые будет поступать информация от датчиков, так как на выходе DSPBO будет нулевой сигнал, который подается на вход разрешения выхода (ОЕ) регистра 2 и на инверсные входы элементов ИЗ, 5, 4, 6, при этом информация отдатчиков через эти элементы и соответствующие элементы ИЛИ 7, 8, 9, 10 поступит на прямые входы элементов И-НЕ 11,12, 13, 14, на инверсные входы которых подаются сигналы с выходов сканирования микросхемы SO и S1, причем с выхода SO сигнал подается на инверсные входы элементов И-НЕ 11, 12, с выхода SO- на инверсные входы элементов И-НЕ 13,14. Таким образом, при наличии нулевого сигнала на выходе SO микросхема опрашивает состояние датчиков 15, 17, находящихся в первом столбце матрицы датчиков, а при нулевом сигнале на выходе S1 - состояние датчиков 16, 18, находящихся во втором столбце матрицы датчиков. При изменении состояния хотя бы одного датчика микросхема вырабатывает сигнал прерывания INT. получив который, ЭВМ считывает новое состояние датчиков из ОЗУ датчиков, предварительно задавая с помощью команды Чтение ОМ-ОЗУ датчиков адреса строк ОЗУ датчиков, в которых хранится информация о состоянии датчиков. Так как при появлении сигнала INT опрос матрицы датчиков прекращается, то для его продолжения (после считывания информации из ОЗУ датчиков) ЭВМ подает команду сброс прерывания - установка режима обнаружения ошибок, после чего опрос матрицы датчиков возобновляется.
Для задания режима контроля исправности устройства ЭВМ с помощью команды Запись в ОЗУ отображения в каждой строке ОЗУ отображения записывает контрольные коды в разрядах, поступающих на входы DS РАЗ, DS PA2, и 1 в разряде, поступающем на выход DSPBO, причем контрольный код для проверки правильности ввода информации по первому и второму каналу (т.е. от датчиков, расположенных в первом столбце матрицы) записывается в последнюю строку, а контрольный код для проверки правильности ввода информации по второму и третьему каналу (т.е. от датчиков, расположенных во втором столбце матрицы) записывается в первую строку ОЗУ отображения. Это связано с тем, что считывание состояния 1-го столбца датчиков и 1-й
строки ОЗУ отображения осущ см-ляе .,- одновременно, поэтому для обеспечения устойчивой работы схемы необходимо копт рольный код для проверки цепей ввода 5 информации от датчиков, расположенных в (1+1 }-м столбце матрицы, записывать в i-ю строку ОЗУ отображения и подавать на входы RET с задержкой на один такт (т.е. со сдвигом на один такт). Затем ЭВМ команде; ;
0 Установка режимов работы клавиатуры - дисплея задает режим Дешифрованного сканирования матрицы датчиков. В этом режиме микросхема будет осуществлять сканирование входов RETO-RET7, на кото5 рые будут поступать контрольные коды с выходов регистра 2, с выхода DSPBO на вход ОЕ регистра 2 будет поступать единичный сигнал. На информационные входы регистра 2 контрольные коды поступают с
0 выходов DS РАЗ, DS PA2 микросхемы и при переходе сигнала на выходе BD с нулевого уровня на единичный записываются в регистр. в каждом такте сканирования сигнал BD формируется после снятия сиг5 налов сканирования, то информация, записанная в регистр 2 в первом такте сканирования, поступает на входы RETO, RET1 во втором такте сканирования, т.е. со сдвигом на один такт.
0 При наличии нулевого сигнала на выходе SO контрольный код поступит на входы RETO, RET1 через элементы ИЛИ 7, 8 и элементы И-НЕ 11, 12, а при наличии нулевого сигнала на выходе S1, контрольный код по5 ступит на входы RETO, RET7 через элементы ИЛИ 9, 10 и элементы И-НЕ 13, 14. Задавая различные значения контрольных кодов ЭВМ, можно проверить правильность прохождения информации по каждому каналу.
0 Техническими преимуществами пред- naiaeMoro решения по сравнению с прототипом является то, что оно позволяет значительно сократить время поиска и устранения неисправности в системе за счет
5 обеспечения возможности проверки исправности каналов ввода информации, канала данных контроллера и выдачи ЭВМ диагностической информации оператору, что облегчает работу технического персона0 ла, обслуживающего систему.
Формула изобретения Устройство для ввода дискретных сигналов в электронную вычислительную машину, содержащее матрицу датчиков с
5 дискретным выходом по N датчиков с дискретным выходом в строке и М датчиков с дискретным выходом в столбце, программируемый контроллер клавиатуры и дисплея, информационный вход-выход, выход при- знака ввода информации, входы тактовый.
установки в О,управления чтением,управление записью, идентификации данных и выборки которого соединены соответственно с одноименными входом-выходом, выходом и входами устройства для подключения к электронной вычислительной-машине, о т- л и ч а ю щ е е с я тем, что, с целью повышения достоверности вводимой в ЭВМ устройством информации путем организации контроля работоспособности цепей ввода, оно дополнительно содержит 2.N М элементов И, регистр и N М элементов ИЛИ, причем выход 1-го датчика с дискретными выходами (, N М) соединен с прямым входом L-ro элемента И, выход которого соединен с первым входом 1-го элемента ИЛИ, выход которого соединен с прямым входом L+M N-ro элемента И, К-й (, М)
информационный выход программируемого контроллера соединен с К-м информационным входом регистра, К-й выход которого соединен с вторыми входами с(К-1) по К N-й элементов ИЛИ, инверсные входы с первого по N.M-й элементов И и вход разрешения выхода регистра соединены с (М+1)-м информационным выходом .программируемого контроллера, Р-й (,
N) выход сканирования которого .соединен с инверсными входами (P+NJ-ro, (P+2.N)-ro, ..., (Р+М N)-ro элементов И, выход признака гашения изображения программируемого контроллера соединен с синхровходом регистра, инверсные выходы с (К N+1)-ro по (К+1) N+IJ-й элементов И объединены и соединены с К-м информационным входом программируемого контроллера.
| Коммутатор дискретных сигналов | 1985 |
|
SU1307575A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Торгов Ю.И | |||
| Дисковая паровая турбина | 1922 |
|
SU580A1 |
