Изобретение относится к сельскому хозяйству, в частности к животноводству, и может быть применено для автоматизации процесса взвешивания животных с помощью проходных весов, как на малых так и на крупных фермах.
Целью изобретения является повышение производительности процесса взвешивания.
Это обеспечивается тем, что открытый доступ животных к платформе весоизмерителя появляется как только предыдущее животное сошло с платформы, и даже раньше,
т.к. удаётся совместить вход последующего животного на платформу с выходом предыдущего, причем во избежание-того, чтобы на платформе оказались конечности двух животных (все четыре последующего и задние две предыдущего) впускать последующее животное только тогда, когда мы уверены что предыдущее вот-вот сойдет с платформы, причем сойдет обязательно.
Мы выявили такой признак. Дело в том, что если корова сняла уже одну ногу с плат- Формы, весоизмерителя (заднюю ногу, разумеется), то она в самое ближайшее время
XI
Ю 4 4 КЭ 4
снимет и вторую заднюю ногу - корова не стоит сколь-нибудь значительного времени вразножку задними ногами. А уж определить этот момент с помощью весов не составляет особой сложности - нагрузка на весоизмерительное устройство от задних ног коровы колеблется в пределах 40,..60% от веса животного (последнее - у высокоудойных животных перед дойкой). Следовательно, нагрузка от одной из задних ног никак не будет превышать 30% от веса животного, и при снижении нагрузки на весо- измеритёль до менее чем 30% от веса животного, можно с уверенностью утверждать, что на платформе весоизмерителя оставалась только одна из задних ног коровы, которая тут же будет ею подтянута к впереди стоящей задней ноге.
Таким образом, мы может определить факт обязательного схождения коровы с платформы весоизмерителя за 0,5...1,5 секунды до того, что корова сойдет с него, и тем самым, пустив в это время последующее животное заходить на платформу, эти 0,5...1,5 секунды сэкономить. При взвеши- вании группы животных, проходящих через .весоизмеритель, это даст суммарную экономию времени.
Способ управления перемещением животных через проходные весы, включает создание и устранение фактора, препятствующего входу животных на платформу весоизмерителя, при этом указанный фактор устраняют при уменьшении нагрузки на весоизмеритель менее чем до 30% от веса предыдущего животного.
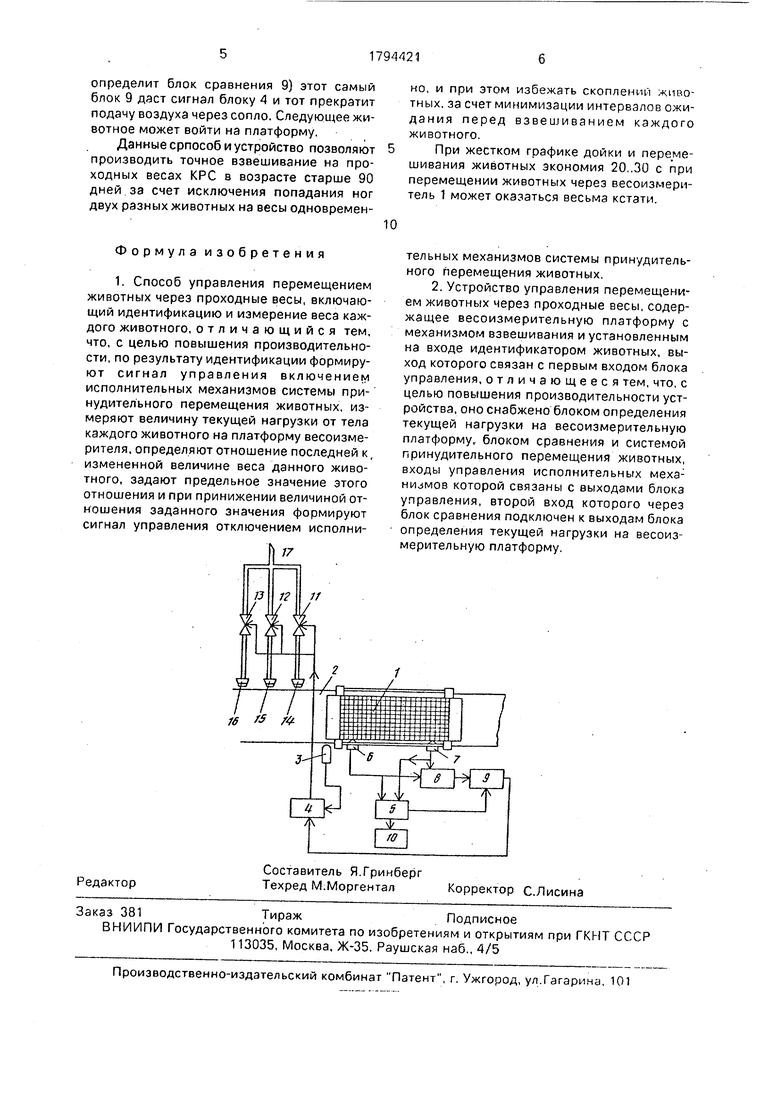
На чертеже изображена схема устройства управления перемещением животных через проходные весы.
Устройство управления перемещением животных включает весоизмеритель 1 к которому ведет скотопрогон 2. У весоизмерителя 1 установлен идентификатор 3 животных, выходы которого связаны с входами блока 4 управления и блока 5 определения веса животных. Другие два входа блока 5 связаны с выходами датчиков 6 и 7, определяющих нагрузку на переднюю и заднюю части платформы весоизмерителя 1. Выходы датчиков 6 и 7 связаны также с входами блока 8 определения фактической текущей нагрузки на весоизмеритель 1. Выходы блоков-5 и 8 связаны с входами блока 9 сравнения, выход которого связан со вторым входом блока 4. Второй выход блока 5 связан с входом блока 10 выдачи животных о весе животных.
Выход блока 4 связан с управляемыми клапанами 11, 12, 13, которые установлены
перед соплами 14, 15, 16. к которым воздух подается через магистраль 17,
Устройство управления перемещением животных через проходные весы работает
следующим образом.
Когда животное подходит к весоизмери- телю 1 по скотопрогону 2 идентификатор 3 определяет, что это за животное, передает данные о нем в блок 4, который в зависимо0 сти от длины тела подошедшего животного включает соответствующее сопло, отсекая тем самым последующее животное,
По существу блок 4 - этом блок памяти, в котором хранятся данные о длине тела
5 каждого из животных стада, имеющих свой идентификационный номер. Как только идентификатор 3 определит, что же именно за животное подошло к весам, данные от этом поступят в блок 4, который выберет в
0 своей памяти соответствующую величину, длину тела животного № ...
После этого блок 4 выберет то из сопел 14... 16, которое будет ближе всего к хвосту животного, и даст команду на пуск струи
5 воздуха именно через это сопло.
В результате окажется, что если какое- то животное и хотело бы пройти впритык к идентифицированному, то в морду начнет дуть воздух, и оно остановится. Тоже живо0 тное, которое нужно пропустить через весы, будет как бы подгоняться сзади этим потоком воздуха . Подошедшее животное следует через весоизмеритель 1, при этом блок 5 определяет его вес следующим образом.
5 Сигналы от датчиков б и 7 поступают в блок 5, где они в первую очередь сравниваются между собой. Как только величины сигналов от датчиков 6 и 7 (имеются в виду не электрические сигналы, которые могут быть
0 нелинейно зависящими от веса, а соответствующие весовым нагрузкам величины сигналов) будут находиться в рамках от 2 : 3 до 3 : 2, т.е. отношение нагрузки на переднюю и заднюю части весоизмерителя 1 будут в
5 интервале 40 : 60%, блок 5 их просуммирует и запишет это данное о весе и также факт того, что одно взвешивание состоялось. И таких взвешиваний может быть достаточно много, в зависимости от частоты измерения.
0 После того, как данные от датчиков 6, 7 снова вышли за указанный интервал и не возвращаются в него по меньшей мере 0,5 сек, блок 5 формирует среднюю величину веса (вычисляет среднее арифметическое от
5 произведенных мгновенных определений веса) и направляет его в блоки 10 и 9.
В тот же блок 9 поступают данные и о том, какова фактическая нагрузка на платформу весоизмерителя. Как только она ста- нет менее 30% от веса животного (что
определит блок сравнения 9) этот самый блок 9 даст сигнал блоку А и тот прекратит подачу воздуха через сопло. Следующее животное может войти на платформу.
Данные српособ и устройство позволяют производить точное взвешивание на проходных весах КРС в возрасте старше 90 дней за счет исключения попадания ног двух разных животных на весы одновременно, и при этом избежать скоплений животных, за счет минимизации интервалов ожидания перед взвешиванием каждого животного.
При жестком графике дойки и перемешивания животных экономия 20..30 с при перемещении животных через весоизмери- тель 1 может оказаться весьма кстати.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ взвешивания животных и устройство для его осуществления | 1990 |
|
SU1795301A1 |
| Способ Гринберга Я.С. определения веса животных на непроходных весах | 1991 |
|
SU1807315A1 |
| Способ определения веса животных | 1990 |
|
SU1739209A1 |
| СПОСОБ И УСТРОЙСТВО ИДЕНТИФИКАЦИИ КОРОВ | 2009 |
|
RU2423825C1 |
| ПЕРЕДВИЖНАЯ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ ЛАБОРАТОРИЯ | 1991 |
|
RU2054247C1 |
| Способ управления процессом весового порционного дозирования сыпучих материалов | 1987 |
|
SU1500852A1 |
| Устройство для взвешивания цилиндрических изделий в потоке | 1982 |
|
SU1016687A1 |
| Устройство для измерения эффективности работы электрофильтра | 1990 |
|
SU1768304A1 |
| Устройство контроля весовой производительности транспортера | 1980 |
|
SU892224A1 |
| Способ дозирования компонентов агломерационной шихты | 1984 |
|
SU1206625A1 |
Использование: сельское хозяйство, в частности животноводство, и может быть применено для автоматического взвешивания животных в режиме их прохода через весоизмеритель 1 как на крупных, так и на небольших фермах. Сущность изобретения: при следовании животных через скотопрогон 2 первое из них доходит до платформы весоизмерителя 1 и расположенного около нее идентификатора 3. По сигналу от него блок 4 в зависимости от длины тела животного осуществляется подача воздуха в соответствующее сопло 14, 5, 16, и тем самым предотвращается движение следующего животного вслед за первым. Первое же из животных идет по платформе весоизмерителя 1, и в это время блок 5 определяет его вес. Затем животное начинает сходить с весов, в тот момент, когда лишь одна его задняя нога остается на платформе 1, нагрузка на платформу весоизмерителя 1 снизится до 30% от измеренного ранее веса данного животного. Такое снижение уловит блок 9 и даст соответствующий сигналу блоку 4; который прекратит подачу воздуха через соответствующее сопло 14, 15, 16 и тем самым даст доступ следующему животному к платформе весоизмерителя 1. 2 с.п, ф-лы, 1 ил. (Л С
Формула изобретения
| Вентильный электродвигатель | 1985 |
|
SU1309241A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
