Изобретение относится к весоизме рительной технике и может быть использовано для автоматического поштучного взвешивания в потоке труб, цилиндрических заготовок и других изделий, свободно перемещающихся по наклонной плоскости под действием собственного веса. . Известно устройство для взвешивания .длинномерных грузов в потоке, содержащее опорную плоскость, определ ющую путь следования груза,, и размещенный на этом пути весоизмери тельный механизм с грузоприемной платформой-, фиксирующим элементом и механизмом наложения и съема груза 1. Наиболее близким к предлагаемому по технической сущности является устройство для взвешивания цилиндри ческих изделий-В потоке, содержащее грузоприемный элемент, расположенный на пути следования изделий и связанный с весоизмерительным механизмом, силоизмерительные датчики которого подключены к прибору индикации и регистрации с выходным управляющим блоком С2 . Недостатком указанных устройств является то, что центрирование изде лий в положении для взвешивания про изводится за счет упругого удара, создающего дополнительную динамичес кую нагруз.ку на силоизмерительные преобразователи. Вследствие этого в этик устройствах могут быть испол зованы только такие преобразователи предел измерения которых значительно превышает измеряемую весовую наг рузку, т.е. преобразователи с более низкой чувствительностью и, следовательно, с более низкой точностью, что снижает точность взвешивания и надежность устройств в работе. Кром того на подъем, опускание и успокое ние груза требуется дополнительное время, что снижает быстродействие устройств. Цель изобретения - повышение точности взвешивания путем исключения динамической перегрузки силоизмери.тельных датчиков. « Поставленная цел.ь достигается тем, что в устройстве для взвешивания цилиндрических изделий в поток содержащем грузоприемный элемент, расположенный на пути следования из делий и связанный с весоизмерительным механизмом, силоизмерительные датчики которого подключены,к прибору индикации и регистрации с выхо ным управляющим блоком,грузоприемный элемент выполнен в виде имеющей эластичную оболочку камеры, заполненной магнитной жидкостью и снабженной электромагнитом, подключенны к выходному управляющему блоку. На чертеже приведена схема устройства для взвешивания цилиндрических изделий в потоке. Устройство для взвешивания цилиндрических изделий в потоке состоит из установленной на пути следования груза грузоприемной платформы 1 с расположенным на-ней грузоприемным элементом, выполненным в виде имеющей эластичную оболочку камеры 2, заполненной магнитной жидкостью 3 и- снабженной электромагнитом 4, и связанным с весоизмерительным механизмом, включакадим силойзмеритель-. ные датчики 5 и прибор 6 индикации регистрации, который электрически связан с блоком 7 управления. Позиции взвешиваемой трубы обозначены а , 5 , в . Устройство работает следующим образом. В исходном положении на грузоприемной платформе 1 груз отсутствует, силоизмерительный датчик 5 не нагружен, прибор 6 индикации и peгиcтpa.ции показывает нулевой отсчет, обмотка электромагнита 4 не запитана, эластичная .камера 2 с магнитной жидкостью 3 выступает над уровнем грузоприемной платформы 1, взвешиваемая труба занимает позицию сч . Взвешиваемая труба (заготовка), перекатываясь под действием собственного веса по наклонной плоскости 8, попадает на грузоприемную платформу 1 и движется по ней, деформируя подсо бой эластичную камеру 2 с магнитной жидкостью 3. Камера 2 охватывает трубу снизу в виде лунки, и эта лунка перемещается вдоль камеры по мере перекатывания трубы по платформе 1. Как только труба начинает двигаться по платформе, весовая нагрузка от трубы передается на сийоизмерительный датчик 5. Датчик 5 вырабатывает измерительный сигнал,.прибор 6 ин- . дикации и регистрации принимает этот сигнал и выдает команду в блок 7 управления. Блок 7 управления по этой команде запитывает обмотку электромагнитта 4 и плавно увеличивает в ней ток от нуля до максимальной величины. По мере увеличения магнитного поля, создаваемого обмоткой 4, магнитная жидкость 3 в камере 2 увеличивает свою кинематическую вязкость от исходной до максимальной, соответствующей фактически твердому телу. В результате труба плавно тормозится и останавливается в позиции 5. Блок 7. управления настраивается таким образом, что останов происходит вблизи центраплатформы 1, что обеспечивает наиболее точную передачу весовой нагрузки от трубы к силой змерительному датчику 5.
Как только труба останавливается в позиции 5 , прибор 6 индикации и регистрации измеряет сигнал датчика 5, находящегося в режиме статической нагрузки, и выдает на своем отсчетном устройстве результат взвеши вания. После окончания взвешивания по команде прибора & индикации и регистрации блок 7 управления обесточивает обмотку электромагнита 4, магнитное поле исчезает, магнитная жидкость 3 В(сстанавливает свою текучесть, камера 2 снова становится эластичной и податливой и труба под действием собственного веса (благодаря наклону платформы 1 ) перекатывается из, позиции 5 в позицию в и следует по плоскости 8 на последующую технологическую операцию. .
Трубы на исходную позицию а мог подаваться любым устройством, обеспчивающим поштучное транспортирование, например шлёппером, дозатором и др.
Предлагаемое устройство по срав.нению с известным обеспечивает повышение точности взвешивания и надежности его в работе путем исключения динамических перегрузок Ъилоизмерительного датчик.а, так как. центрирование трубы происходит путем плавного торможения, занимающего значительный отрезок пути (.практически 200-300 мм против примерно 0,1 мм. при упругом ударе о выступ призмы ), Это дает возможность использовать датчики более высокой чувствительности, чем в известных устройствах, требукяцих 5-10-кратного запаса по наибольшему пределу взвешивания. .Кроме того, устройство обеспечивает повышение производительности весов путем исключения операций наложения и съема груза. Труба в предлагаемом устройстве находится на грузоприемной платформе только минимально необходимое время, определяемое допустимой величиной отрицательного ускорения при торможении трубы. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического взвешивания длинномерных грузов в потоке | 1976 |
|
SU575498A1 |
| МОНОРЕЛЬСОВЫЕ ВЕСЫ | 1992 |
|
RU2057302C1 |
| Весоизмерительное устройство | 1983 |
|
SU1143988A1 |
| АВТОМАТИЗИРОВАННАЯ ВЕСОИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1992 |
|
RU2088895C1 |
| Устройство для весового учета количества перекачиваемой жидкости | 1982 |
|
SU1026017A1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| Электромеханические весы | 1986 |
|
SU1760365A1 |
| Устройство для автоматического взвешивания цилиндрических длинномерных грузов в потоке | 1981 |
|
SU987403A1 |
| Устройство для взвешивания движущихся объектов | 1974 |
|
SU526781A1 |
| Весовое устройство | 1984 |
|
SU1190201A1 |
УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ В ПОТОКЕ, содержащее груз оприемный элемент, расположенный на пути следования изделий и связанный с весоизмерительным механизмом, силоизмерйтельные датчики которого подключены к прибору индикации и регистрации с выходным управляющим блоком, от л и ч а ю1д е е с я тем, что, с целью повышения точности взвешивания путем исключения динамической перегрузки силоизмерительных датчиков, грузоприемный элемент .выполнен в виде имеющей эластичную оболочку камеры, заполненной магнитной жидкостью и 5 снабженной электромагнитрм, подключенным к выходному управляющему блоку. о: о:) 00 К1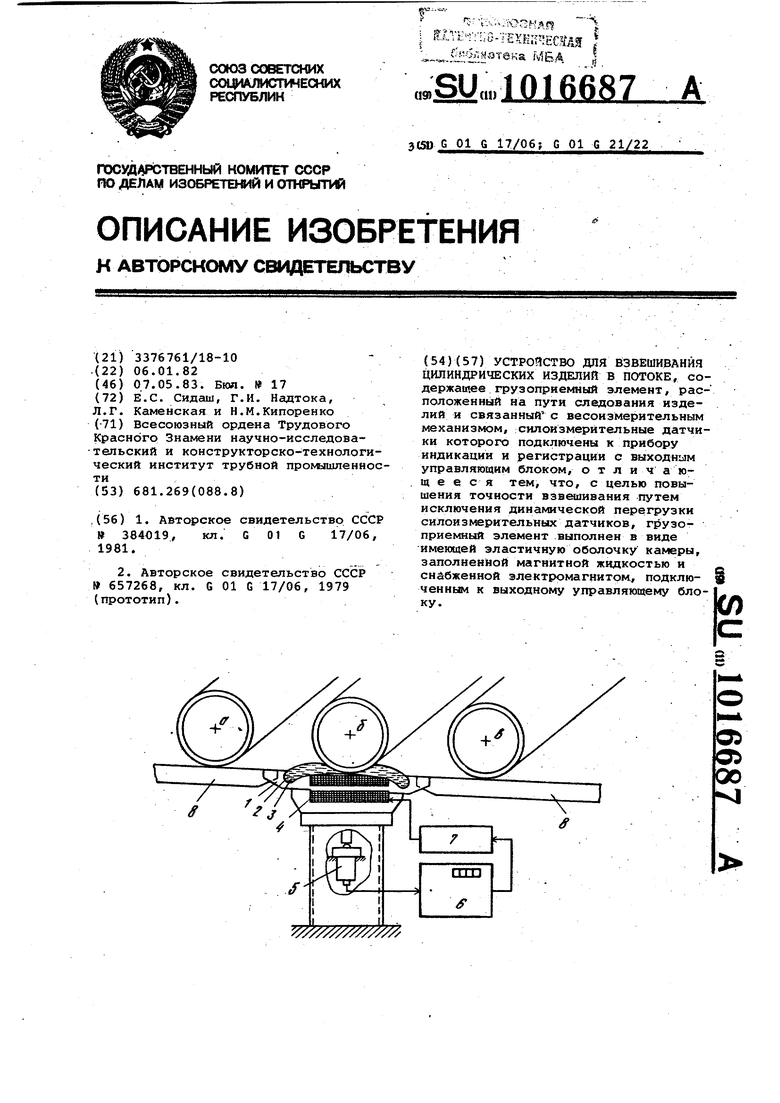
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ВЗВЕШИВАНИЯ ТРУБ В ПРОЦЕССЕ ИХ ПРОИЗВОДСТВА | 0 |
|
SU384019A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для взвешивания цилиндрических изделий | 1977 |
|
SU657268A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
