Изобретение относится к электротехнике и может быть использовано для испытания двигателей транспортных средств.
Известно нагрузочное устройство для испытания автоматизированных электроприводов, содержащее нагрузочную машину с преобразователем, датчиком скорости и датчиком динамического тока испытуемой машины, выход которого подключен к первому входу преобразователя нагрузочной машины, ко второму входу которого подключен датчик скорости, а третий вход соединен с задатчиком момента.
Наиболее близким к предлагаемому является .нагрузочное устройство для испытания двигателей, содержащее нагрузочный блок с преобразователем, датчики момента, скорости и пути, задатчики времени и статического момента, выходы которых подключены к входам преобразователя нагрузочного блока.
Недостатком известных устройств является невозможность создания с их помощью динамических нагрузок на испытываемый двигатель, т.к. при движении транспортного средства двигатель испытывает динамические нагрузки, являющиеся функциями внешних воздействий, например, состояния дороги и приведенной массы (момента инерции), которая может меняться в широких пределах.
Цель изобретения - обеспечение изменения моделирующего момента инерции для создания динамических нагрузок на испытываемый двигатель.
Поставленная цель достигается тем, что в устройство для испытания двигателей, содержащее нагрузочный блок, преобразователь, выход которого соединен с входом
ч ю
(Л W
с
00
нагрузочного блока и датчик момента, введены масштабирующий усилитель, интегратор, задатчик и умножитель, причем первый вход умножителя соединен с выходом датчика момента, выход задатчика соединен со вторым входом умножителя, выход которого соединен с входами интегратора и масштабирующего усилителя, выходы которых сое- динены с первым и вторым входами преобразователя соответственно.
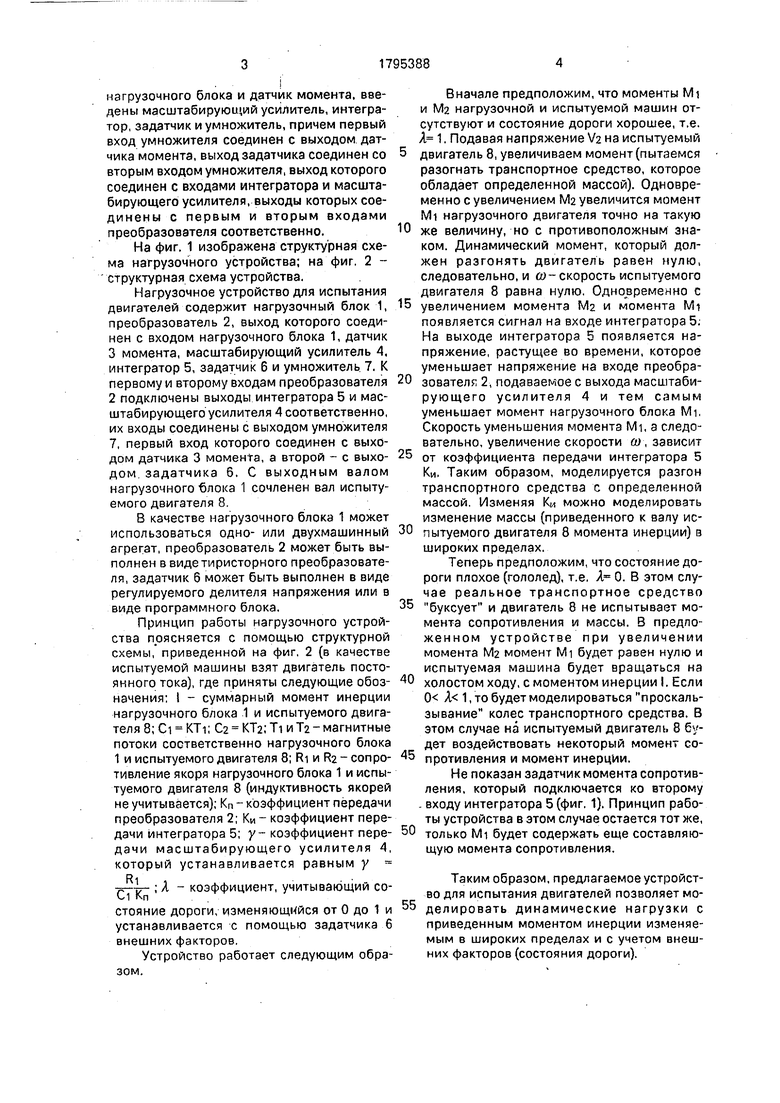
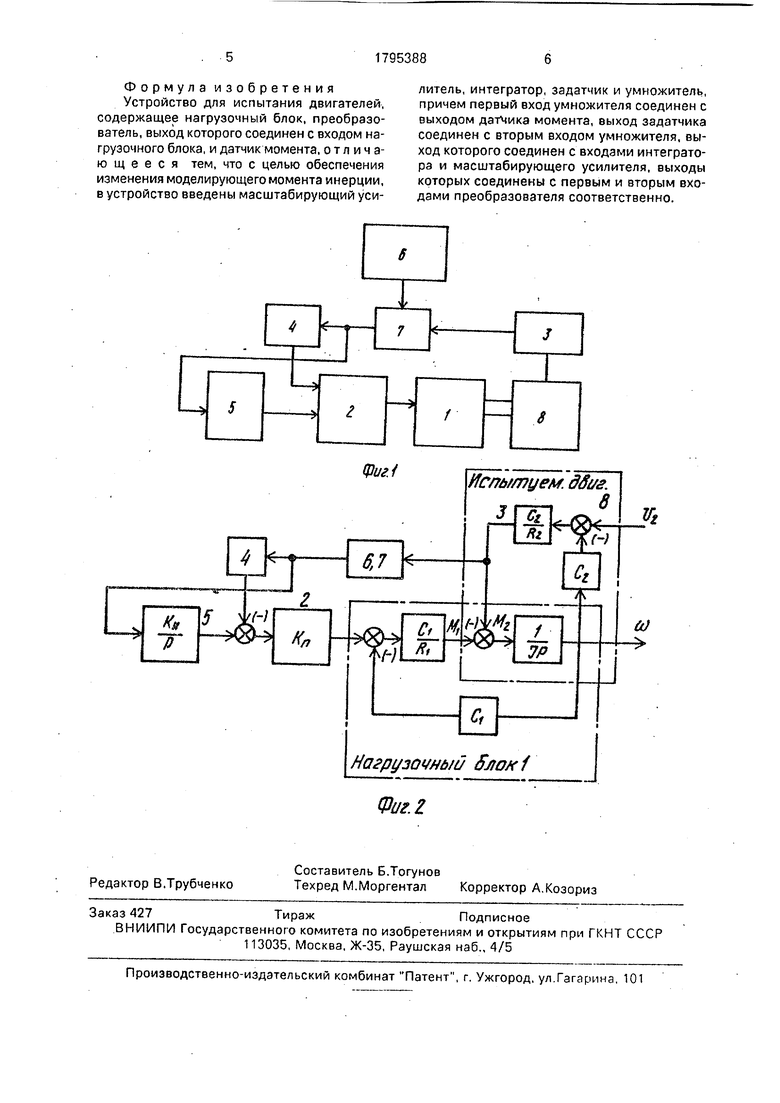
На фиг. 1 изображена структурная схема нагрузочного устройства; на фиг. 2 - структурная схема устройства.
Нагрузочное устройство для испытания двигателей содержит нагрузочный блок 1, преобразователь 2, выход которого соединен с входом нагрузочного блока 1, датчик 3 момента, масштабирующий усилитель 4, интегратор 5, задатчик 6 и умножитель 7. К первому и второму входам преобразователя 2 подключены выходы интегратора 5 и масштабирующего усилителя 4 соответственно, их входы соединены с выходом умножителя 7, первый вход которого соединен с выходом датчика 3 момента, а второй - с выходом, задатчика б, С выходным валом нагрузочного Флока 1 сочленен вал испытуемого двигателя 8.
В качестве нагрузочного блока 1 может использоваться одно- или двухмашинный агрегат, преобразователь 2 может быть выполнен ввидетиристорного преобразователя, задатчик 6 может быть выполнен в виде регулируемого делителя напряжения или в виде программного блока.
Принцип работы нагрузочного устройства поясняется с помощью структурной схемы, приведенной на фиг, 2 (в качестве испытуемой машины взят двигатель постоянного тока), где приняты следующие обозначения: I - суммарный момент инерции нагрузочного блока 1 и испытуемого двигателя 8; Ci KTi; Са КТ2; Ti и Та - магнитные потоки соответственно нагрузочного блока 1 и испытуемого двигателя 8; RI и Ra - сопротивление якоря нагрузочного блока 1 и испытуемого двигателя 8 (индуктивность якорей не учитывается); Кп - коэффициент передачи преобразователя 2; Ки - коэффициент передачи интегратора 5; у- коэффициент передачи масштабирующего усилителя 4, который устанавливается равным у Ris. v А - коэффициент, учитывающий
стояние дороги, изменяющийся от 0 до 1 и устанавливается с помощью задатчика 6 внешних факторов.
Устройство работает следующим образом.
Вначале предположим, что моменты Mi и Ма нагрузочной и испытуемой машин отсутствуют и состояние дороги хорошее, т.е. А 1. Подавая напряжение /2 на испытуемый
двигатель 8, увеличиваем момент (пытаемся разогнать транспортное средство, которое обладает определенной массой). Одновременно с увеличением Ма увеличится момент Mi нагрузочного двигателя точно на такую
же величину, но с противоположным знаком. Динамический момент, который должен разгонять двигатель равен нулю, следовательно, и о-скорость испытуемого двигателя 8 равна нулю. Одновременно с
увеличением момента Мг и момента Mi появляется сигнал на входе интегратора 5. На выходе интегратора 5 появляется напряжение, растущее во времени, которое уменьшает напряжение на входе преобразователя 2, подаваемое с выхода масштабирующего усилителя 4 и тем самым уменьшает момент нагрузочного блока ML Скорость уменьшения момента Mi, а следовательно, увеличение скорости ш , зависит
от коэффициента передачи интегратора 5 Ки. Таким образом, моделируется разгон транспортного средства с определенной массой. Изменяя Км можно моделировать изменение массы (приведенного к валу испытуемого двигателя 8 момента инерции) в широких пределах.
Теперь предположим, что состояние дороги плохое (гололед), т.е. А 0. В этом случае реальное транспортное средство
буксует и двигатель 8 не испытывает момента сопротивления и массы. В предложенном устройстве при увеличении момента Ма момент Mi будет равен нулю и испытуемая машина будет вращаться на
холостом ходу, с моментом инерции I. Если 0 А 1, то будет моделироваться проскальзывание колес транспортного средства. В этом случае на испытуемый двигатель 8 будет воздействовать некоторый момент сопротивления и момент инерции.
Не показан задатчик момента сопротивления, который подключается ко второму . входу интегратора 5 (фиг, 1). Принцип работы устройства в этом случае остается тот же,
только Mi будет содержать еще составляющую момента сопротивления.
Таким образом, предлагаемое устройство для испытания двигателей позволяет моделировать динамические нагрузки с приведенным моментом инерции изменяемым в широких пределах и с учетом внешних факторов (состояния дороги).
Формула изобретения Устройство для испытания двигателей, содержащее нагрузочный блок, преобразователь, выход которого соединен с входом нагрузочного блока, и датчик момента, отличающееся тем, что с целью обеспечения изменения моделирующего момента инерции, в устройство введены масштабирующий усилитель, интегратор, задатчик и умножитель, причем первый вход умножителя соединен с выходом датчика момента, выход задатчика соединен с вторым входом умножителя, выход которого соединен с входами интегратора и масштабирующего усилителя, выходы которых соединены с первым и вторым входами преобразователя соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания электроприводов | 1987 |
|
SU1515314A1 |
| Автоматический стенд для испытаний трансмиссий | 1987 |
|
SU1460640A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| Система автоматического управления режимами работы двигателя транспортного средства | 1990 |
|
SU1754506A1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Устройство для испытаний на случайные вибрации | 1990 |
|
SU1762130A2 |
| Способ приработки двигателя внутреннего сгорания | 1985 |
|
SU1354047A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАКОПЛЕНИЯ ЭНЕРГИИ В МАТЕРИАЛЕ ПРИ ЦИКЛИЧЕСКОМ НАГРУЖЕНИИ | 1994 |
|
RU2087895C1 |
Изобретение относится к электротехнике и может быть использовано для испытания двигателей транспортных средств. Цель изобретения: обеспечение изменения моделирующего момента инерции для создания динамических нагрузок на испытываемый двигатель. Устройство содержит нагрузочный блок 1, преобразователь 2, датчик 3 момента, масштабирующий усилитель 4, интегратор 5. задатчик 6, умножитель 7. Испытуемый двигатель 8 соединяется с выходным валом нагрузочного блока 1. Изменением коэффициента передачи сигнала от датчика 3 момента с помощью задатчика 8, масштабирующего усилителя 4 и скорости изменения сигнала с помощью интегратора 5 осуществляется моделирование динамических нагрузок с приведенным моментом инерции с учетом внешних факторов, воздействующих на испытуемый двигатель, 2 ил. (/ С
Фиг.{
Мс/ ь//яуем. dfit/г. 8
Vt
Нагрузочный faoxf
| И.Д.Кочубиевский, В.А.Стражмейстер | |||
| Динамическое моделирование нагрузок при испытаниях автоматических систем, М.-Л., Энергия, 1965, с | |||
| ,10-11 | |||
| Нагрузочное устройство для испытания автоматизированных приводов и следящих систем | 1960 |
|
SU137180A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
