Для испытания автоматизированных приводов и следящих систем известно применение нагрузочных устройств с нагрузочным генератором постоянного тока, обмотка возбуждения которого подключена к источнику стабилизированного напряжения, а в цепь якоря включены нагрузочное сопротивление и якорь вольтодобавочного генератора с приводом от вспомогательного двигателя.
С целью обеспечения возможности получения заданного изменения момента на валу испытуемого привода, предлагается к обмотке возбуждения указанного вольтодобавочного генератора через усилитель подключить соединенные последовательно датчики зависимости момента (например, от скорости, времени, пути), датчик постоянного момента и датчик обратной связи.
Такое нагрузочное устройство позволяет с необходимой точностью осуществить испытание автоматизированных приводов и следящих систем, моменты нагрузки Мн которых, как известно, в общем случае представляют собой сложные, часто случайные функции скорости, пути, времени и других факторов:
((i,+M(S)+M(t).
где Мс - постоянная составляющая момента;
М{со) -момент, зависящий от скорости системы;
M(S) - момент, зависящий от пути, пройденного системой;
M(t) - момент, зависящий от времени.
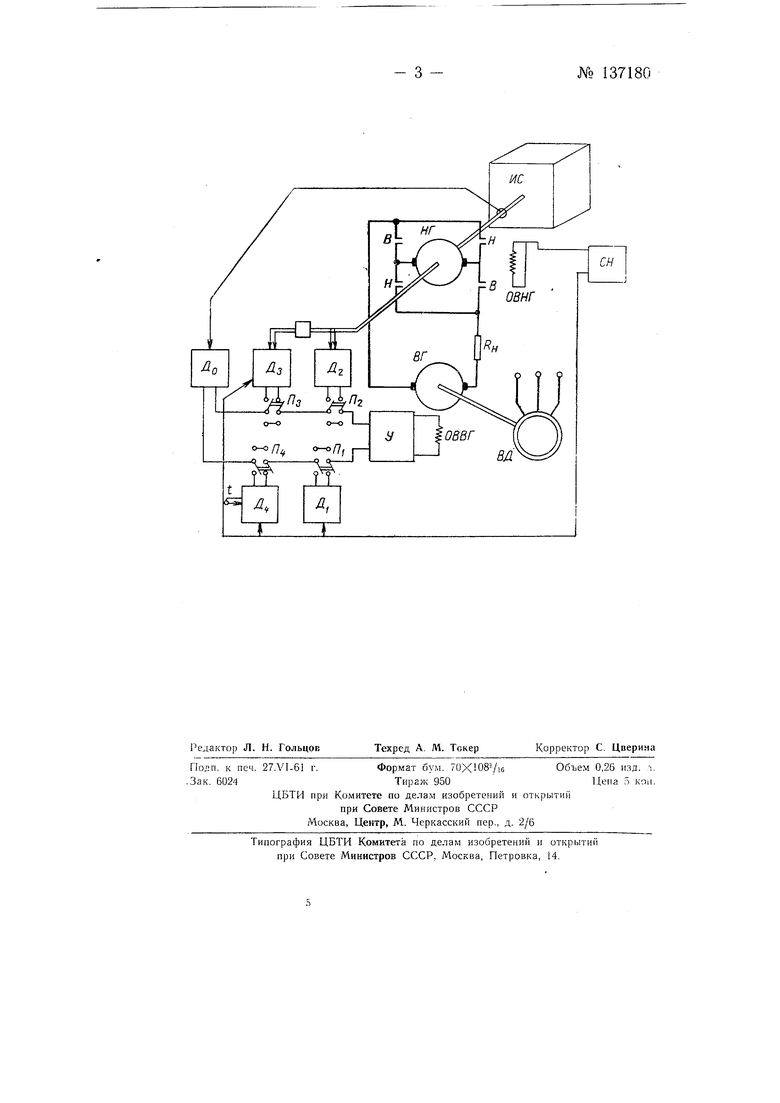
На чертеже представлена принципиальная блок-схема предлагаемого устройства.
Выходной вал двигателя исследуемой системы ИС соединен с нагрузочным генератором НГ постоянного тока, обмотка возбуждения ОВНГ которого питается от источника СН стабилизированного напряжения.
№ 137180- 2 В цепь якоря генератора НГ включены нагрузочное сопротивление R и якорь вольтодобавочного генератора ВГ постоянного тока с приводом от вспомогательного электродвигателя ВД. Обмотка возбуждения ОВВГ этого генератора питается от усилителя У.
На вход усилителя У поступает сумма напряжений от четырех датчиков Дь Дг, Дз, Д4 и встречно им направленное напряжение датчика обратной связи До.
Датчик Да предназначен для получения постоянного нагрузочного момента Мс на валу испытуемого привода. Необходимое значение момента Мс определяется установкой датчика. Датчик Дз вырабатывает напряжение в функции скорости испытуемого привода. Датчик Дз вырабатывает напряжение в функции пути, проходимого валом исследуемой системы. Датчик Д4 вырабатывает напряжение в функции времени.
Датчики Дь Д2, Дз, Д представляют собой задающие устройства, подключенные к входу усилителя при гюмощи переключателей Яь Яг, Яз, Я4.
Датчик обратной связи До измеряет нагрузочный момент на валу испытуемого привода и подает напряжение, пропорциональное моменту Мл. Соответствующей настройкой задающих датчиков можно задать на вход усилителя желаемый вид функции нагрузочного момента Мс+М(&) + +M(S)+M(t). При необходимости некоторые датчики могут быть отключены.
В результате применения обратной связи по моменту Мн. напряжение на обмотке возбуждения нагрузочного генератора НГ, э.д.с. вольтодобавочного генератора ВГ и ток в контуре НГ-ВГ поддерживается такой величины, что значение момента Мн равно заданному.
Таким образом, система управления предлагаемого устройства представляет собой следящую систему по моменту нагрузочного генератора.
При реверсах вала исследуемой системы изменяется полярность наиряжения генератора НГ. Для того, чтобы не изменять при этом полярность генератора ВГ (что вызовет увелнчение постоянной времени системы), якорь нагрузочного генератора НГ включен в реверсивный четырехугольник контакторов В и Н, катущки которых включаются контактами реле управления скорости, связанного с валом испытуемого привода. В результате применения такой схемы направление тока в якоре генератора ВГ не зависит от реверсов якоря нагрузочного генератора.
Предмет изобретения
Нагрузочное устройство для испытания автоматизированных приводов и следящих систем, содержащее нагрузочный генератор постоянного тока, обиотка возбуждения которого подключена к источнику стабилизированного напряжения, а в цепь якоря включены нагрузочное сопротивление и якорь вольтодобавочного генератора с приводом от вспомогательного двигателя, отличающееся тем, что, с целью получения заданного закона изменения момента, к обмотке возбуждения вольтодобавочного генератора через усилитель подключены соединенные последовательно: датчик зависимости момента, например, от скорости, времени, пути, датчик постоянного момента и датчик обратной связи.