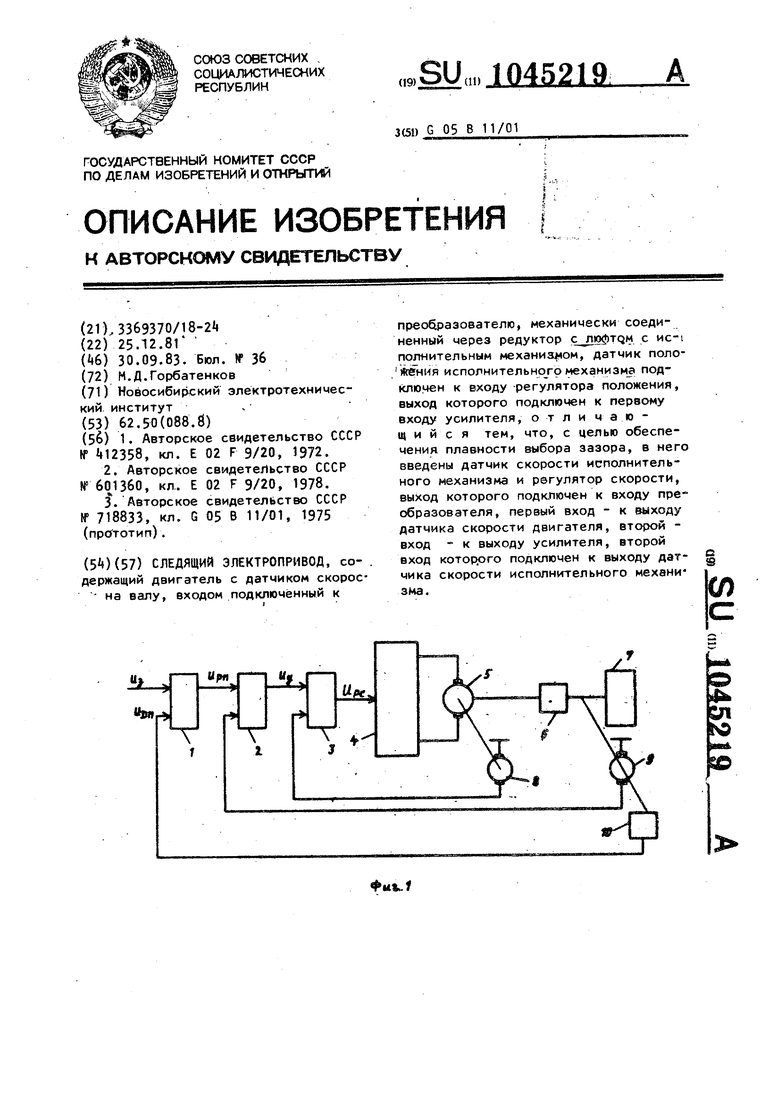
Изобретение относится к автоматизированному электроприводу, где имеются зазоры в механических сочлене нйях силовых элементов и может быть ИСПОЛЬЗОВАНО в электроприводах с автематическим регулированием положе ния, например, в металлорежущих станках, спорно-поворотных механизмах экскаваторов, моделирующие стендов и роботов-манипуляторов. Известен электропривод, выполненный по системе управляемый преобра зователь - двигатель с двуконтурной системой подчиненного регулирования содержащий регулят-оры тока и напряжения, датчики тока и напряжения, задатчик интенсивности, включающий последовательно соединенные релейный элемент, интегратор и инвертор lj . Недостатком электропривода является значительное, снижение темпа разгона двигателя на период выбора зазора что вызывает увеличение продолжительности цикла и ухудшает управляемость электроприводом. Известен также электропривод, выполненный по системе управляемый,преобразователь - двигатель с двуконтурной системой подчиненного регулирова ния, содержащий регуляторы тока и на пряжения, датчики тока и напряжения, задатчик интенсивности, включающий последовательно соединенные релейный элемент, инвертор и интегратор, а также четыре релейных элемента, апериоди ческий усилитель,блок выделения модуля источник постоянного напряжения, триг и ключ, введенные в цепь задатчика интенсивности между инвертором и интегратором, управляющий вход ключа подключен к выходу одного из релейных элементов, к входам которого подведен выходы источника постоянного напряжения, апериодического усилителя, триггера и входы второго, третьего и четвертого релейных элементов, причем выход второго релейного элемента под ключей к одному из входов апериодимес кого усилителя, ко второму входу кото рого через диоды подсоединены инвертор и релейный элемент задатчика интенсивности и Ёход третьего релейного элемента. К выходу последнего подключен один из входов триггера, второй вход которого через четвертый релейный элемент соединен с выходом блока выделения модуля, связанного с выходом датчика токаЩ . Недостатками данного устройства являются сложность и пониженная помехозащищенност ь. Наиболее близок к предлагаемому следящий электропривод, содержащий последовательно соединенные регулятор положения, звено нечувстаительности, промежуточный усилитель, управляемый преобразователь и двигатель, причем вал двигателя связин с датчиком скорости и через механическую передачу с люфтом с исполнительным механизмом, на валу которого установлен датчик ускорения и датчик положения, выход которого подключен к входу регулятора положения, а также дифференцирующее звено, последовательно соединенные масштабирующий усилитель, инвертор и выпрямитель, выходы которого подключены ко второму и третьему входам звена типа зона нечувствительности, а входы масштабирующего усилителя соединены с выходом датчика ускорения и дифференцирующего звена, вход которого подключен к выходу датчик скорости з . Однако известный электропривод не обеспечивает плавного выбора зазора, что приводит к значительным динамическим перегрузкам в механических сочленениях силовых элементов привода и, как следствие, понижает его долговечность. : Цель изобретения - обеспечение плавности выбора зазора следящеего электропривода. Поставленная цель достигается тем, что э следящий электропривод, содержащий двигатель с датчиком скорости на валу, входом подключенный к преобразователю и механически соединенный через редуктор с люфтом с исполнительным механизмом датчик положения которого подключен к входу регулятора положения, выход которого подключен к первому входу усилителя. Дополнительно введены датчик скорости исполнительного механизма и регулятор скорости ,s выход которого соединен с входом преобразователя, первый вход - с выходом датчика скорости двигателя, второй вход - с выходом усилителя, второй вход которого подкл10чен к выходу датчика скорости исполнительного механизма. Не фиг. 1 представлена функциональная блок-схема.электрюпривода; на фиг.2 эгюры, поясняющие его работу. 3 Следящий электропоивод фиг.1 содержит регулятор 1 положения, усилитель 2, регулятор 3 скорости, управляемый преобразователь k, двигатель -5, редуктор с люфтом 6, исполни тельный механизм 7, датчик 8 скорости двигателя, датчик 9 скорости исполнительного механизма и датчик 10 положения исполнительного механизма. Следящий электропривод в режиме позиционирования работает следующим образом. На входе системы в момент.времени tg возникает ступенчатое воздействие U-j (фиг.2а), соответствующее перемещению механизма на определённый угол, определяемый -амплитудой входного воздействия. При этом регулятбр 1 положения находит.ся в насыщении, т.е. Up,n. ирдпюх- э выходе усилителя 2 устанавливается напряжение U(j 03 которому хоответствует разность скоростей исполнительного двигателя и механизма ( обусловленная допустимым уровнем динамических нагрузок механических сочленений электропривода в момент зацепления, Коэффициент усиления усилителя по первому входу определяется -р.п.гпах и он всегда меньше единицы. За время двигатель разгоняется до скорости (фИГ.2в), COOTветствующей Un д и пока не будет пройден зазор его скорость остается постоянной. За время tetg происходи процесс зацепления и на отрезке времени tj-trt механизм разгоняется до максимальной скорости. Это достигает ся за счет в ж)Мент времен на втором входе усилителя появляется сигнал положительной обратной связи напряжению тахогенератора механизма. Коэффициент усилителя по второму вхо ду .определяется з условия К ЦМ|Р1(7у- Uij.i Т.Г.мсу .max Движение механизма на максимальной скорости продолжается до момента времени t, далее регулятор положения выходит из насыщения и на отрезке ty-tg, двигатель выходит из зацепления с механизмом, его скорость понижается относительно скорости механизма на величину (р(. На этом отрезке времени сигнал на втором входе усилителя (сигнал тахогенератора механизма) меняется незначительно только под действием статического момента механизма, а изменение сигнала на выходе усилителя.обусловлено изменением .. За время двигатель проходит зазор и на участке входит в зацепление. После этого начинается эффективное торможение механизма, определяемое сигналом регулятора положения и тахогенератора механизма. Э ффект ограничения разности скоростей двигателя и механизма при Движении привода в зазоре достигнут тем, что на вход регулятора скорости двигателя подается ослабленный сигнал регулятора положения, который пропорционален допустимой разности скоростей двигателя и механизма. Скорости электропривода выше этой разности обусловлены положительной связью по тахогенератору механизма. Таким образом, в результате введения в следящий электропривод тахогенератора и регулятора скорости обеспечивается плавность выбора зазора путем ограничения разности скоростей двигателя и механизма при движении приводав зазоре, величина каторой определяется допустимым уровнем динамических перегрузок в механических сочленениях силовых элементов электропривода в момент зацепления. Это, в конечном итоге, обуславливает высокую долговечность.

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1987 |
|
SU1442973A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Следящий электропривод | 1985 |
|
SU1332260A2 |
| ИНТЕГРИРУЮЩИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2177168C1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Следящий электропривод | 1988 |
|
SU1644084A1 |
| Следящий электропривод | 1974 |
|
SU607178A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |

СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД, содержащий двигатель с датчиком скорое на валу, входом подключённый к преойразователю, механически соединенный через редуктор с люфтдм с ис-i полнительным механизмом, датчик пололения исполиительнр -о механизм подключен к входу регулятора положения, выход которого подключен к первому входу усилителя, отличающийся тем, что, с целью обеспечения плавности выбора зазора, в него введены датчик скорости исполнительного механизма и регулятор скорости, выход которого подк.пючен к входу преобразователя, первый вход - к выходу датчика скорости двигателя, второй вход - к выходу усилителя, второй вход которрго подключен к выходу датчика скорости исполнительного механи зма. чи