Изобретение относится к технике гидроакустических измерений и может быть использовано в фазовых гидролокаторах бокового обзора, предназначенных для съемки рельефа дна.
Известен способ определения глубин в стороне от судна путем измерения дальностей и определения направлений на элементы отражения донного рельефа на основе использования явления интерференции сигналов донной реверберации, принимаемых а двух точках, разнесенных в вертикальной плоскости на известную величину Ь, равную нескольким длинам волн несущей частоты in, возбуждаемых в виде тоннальных импульсов в одной из точек,
Измерение разности фаз колебаний в точках приема, измерение временных интервалов Тп между моментом излучения и фиксированными моментами кратности измеренной разности фаз колебаний целому числу 2л:, визуальное определение порядковых номеров этих моментов, дают возможность вычислить искомые глубины Ln и соответствующие им горизонтальные отсто- яния In по следующим формулам
Zn DnStn в 2jj- Dn -jg (1)
In On cos 6. Dn V1-(|J)2 (2)
где с - скорость распространения звука в воде;
Dn
ctn
- наклонные расстояния до
n-й точки отражения;
п - порядковый номер момента кратности измеренной разности фаз целому числу 2л:;
А - длина волны акустических колебаний;
I - величина базового разноса точек приема по вертикали;
N максимальное число регистрируемых моментов кратности;
sln0n,M-()2 созвп (3)
Постоянными и известными членами формул (1), (2) являются значения с и N, а значения tn измеряются в каждом цикле зондирования, таким образом основной задачей является привязка измерений tn к реальным значениям вп, то есть определение порядковой нумерации моментов кратности п. Для этого, в настоящее время используется, так называемый нониусный способ. При этом способе в моменты времени, при которых разность фаз принимаемых эхо- сигналов кратно целому числу 2я, например, на самописце, производится яркостная отметка, в результате чего, в ходе съемки формируется семейство интерференционных полос. Прямая оцифровка этих полос, как правило, невозможна из-за отсутствия информации, поскольку, неопределенное число полос с малыми номерами остаются за пределами зоны обзора фазового гидролокатора бокового обзора. Поэтому, для определения порядкового номера этих полос в систему включены еще два вспомогательные точки приема, которые также как основные разнесены по вертикали, но на несколько меньшую длину bi. Используя основные и вспомогательные точки приема можно формировать по очереди два семейства интерференционных полос, которые должны иметь совпадающие пары полос с заранее предвычисленными номерами,
Например, при N -7 21 NI Д 14 должны совпадать пары полос с номерами;
21 18-±5 - -3 14 12 10 2
Основным недостатком описанного
способа является высокая вероятность ошибки на единицу в определении порядкового номера п, в условиях качки из-за смещения полос, при котором совпадающими оказываются полосы соседние с предвычисленными. Выявление ошибки путем частого повторения данной операции, ведет к значительным потерям информации о глубинах из-за низкой производительности способа. Целью изобретения является упрощение процесса определения глубин и повышения их достоверности путем исключения пропусков в определении порядковых номеров п без использования вспомогательных точек приема.
Указанная цель достигается путем дополнительных измерений времени запаздывания Atn прихода синфазных сигналов в верхнюю точку приема относительно нижней на заданном временном интервале т.
Измерение величин Atn обеспечивается тем, что в момент выделения синфазных сигналов за время г b/с определяют характер изменения периодов на этом интервале. Для этого, периоды колебаний принимаемых нижней и верхней точками заполняют определенной кодовой последовательностью и сравнивают их, при совпадении кодов измеряют время Atn относительного запаздывания колебаний в верхней точке
приема.
Для повышения точности измерений величин Atn в условиях помех они производятся в пределах ширины полосы пропускания фазового дискриминатора, а результаты на
капливаются и осредняются.
Известно, что сигнал рассеянный дном в точках приема представляет собой узкополосный гауссовский шум с нормальным законом распределения, ширина спектра которого в основном определяется спектром зондирующего сигнала и полосой пропускания приемного тракта. Плотность вероятности флуктуации периодов частоты
такого сигнала на входе полосового фильтра приемника с высокой степенью точности соответствует также нормальному закону распределения, а сами периоды являются случайными величинами с математическим
ожиданием равным величине периода несущей частоты зондирующего сигнала.
При условии, что расстояние между верхней и нижней точками приема меньше интервала пространственной корреляции сигнала (обычно b с гп. где гп- длительность зондирующего сигнала), можно утверждать, что разность хода синфазных сигналов пропорциональна времени корреляции процессов в обеих канала.
Тогда:
Atn Јsinu |.(4)
Отсюда:
п тн Atn(5)
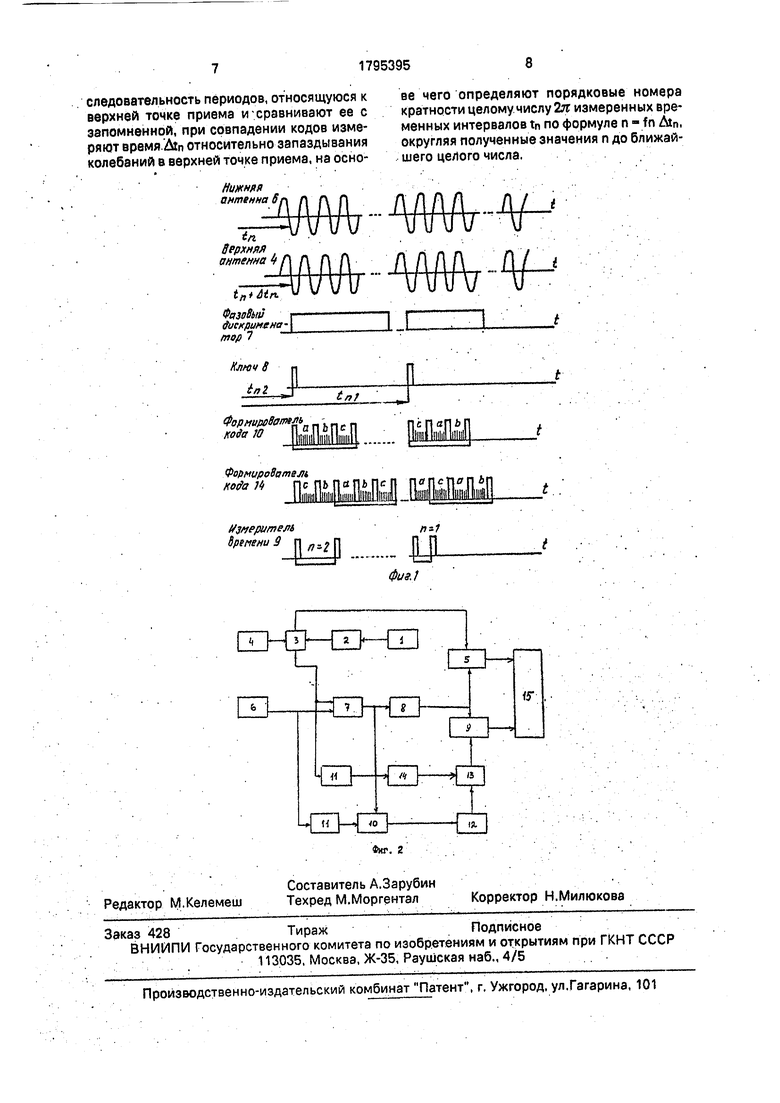
На фиг.1 изображены временные диаг- раммы поясняющие сущность изобретения (режим приема эхо-сигналов).
В случае получения дробных значений из-за погрешности измерений Atn, полученные числа округляются до ближайшего це- лого.
Критерием достоверности правильного определения п является регулярность полученных порядковых номеров. Отдельные выбросы могут быть сразу исправлены без повторных изменений.
Пример устройства, реализующего способ, приведен на фиг.2, где 1 - генератор колебаний несущей частоты; 2 -формирователь зондирующих импульсов; 3 - антенный переключатель; А - приемо-передающая антенна; 5 - схема измерения -времени; 6 - приемная антенна; 7 - интерферометр; 8 - ключ; 9 - схема измерения времени; 10 - схема формирования кода; 11 - схема изме- рения периодов; колебаний эхо-сигналов;
0
5
0
5
0
5 0
12 - запоминающее устройство; 13 - схема сравнения кодов; 14 - схема формирования кодов; 15 -- вычислительное устройство.
Генератор 1 колебаний несущей частоты fn через формирователь 2 зондирующих импульсов длительности и антенный переключатель 2 зондирующих импульсов длительностью и антенный переключатель 3 в моменты времени to возбуждают приемопередающую антенну 4, размещенную в верхней точке приема, этим же сигналом запускается схема 5 измерения времени tn. За период Т приема сигналов донной реверберации антеннами 4 и 6 в моменты tn совпадения фаз сигналов на этих антеннах с выхода интерферометра 7 через ключ 8 поступает импульс для запуска схемы 9 измерения времени Atn. на схему 5 для снятия очередного отсчета времени tn и на схему 10 формирователя кода выборки К периодов на интервале времени совпадения фаз эхо-сигналов, куда поступает информация со схемы 11 измерения периодов колебаний эхо-сигналов в течение всего периода Т приема эхо-сигналов. С выхода схемы 10 выборка из К измеренных и кодированных периодов эхо-сигнала поступает в запоминающее устройства 12 и далее, на схему 13 сравнения кодов, на второй вход которой непрерывно поступает информация со схемы 14 формирования кодов измеренных периодов колебаний, принятых верхней .антенной. В моменты совпадения кодов на этих входах схемы 13 с ее выхода поступает импульс на схему 9 для снятия отсчета Atn, Измеренные значения tn и соответствующие им значения Atn подаются на вычислительное устройство 15, где последовательно вычисляется заданный ряд величин Dn, n и соответствующие им значения Ln и п.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ ПРИ ОБСЛЕДОВАНИИ РЕЛЬЕФА ДНА ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА | 2012 |
|
RU2521127C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ОСАДКИ, ТОЛЩИНЫ И ВЫСОТЫ ЛЬДА | 2012 |
|
RU2500985C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И ОСАДКИ ПОДВОДНОЙ ЧАСТИ АЙСБЕРГА | 2016 |
|
RU2623830C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2014 |
|
RU2548596C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2011 |
|
RU2461845C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА | 1995 |
|
RU2089924C1 |
Изобретение относится к технике гидроакустических измерений, в частности к способам определения глубин и их относительных координат на основе фазовых измерений направлений на точку отражения синфазных эхосигналов и соответствующих расстояний с помощью фазового гидролокатора бокового обзора. Цель изобретения - повышение достоверности определения глубин -достигается путем исключения промахов в определении номеров моментов излучения и фиксированными моментами кратности измерений разности фаз колебаний целому числу 2л. Для этого дополнительно измеряют периоды сравниваемых колебаний на заданном временном интервале от момента начала фиксации кратности разности фаз колебаний целому числу 2лп, определяют и запоминают характер изменения периодов на этом интерзале в виде кода, относящегося к нижней антенне, определяют текущую кодовую последовательность периодов, относящуюся к верхней антенне, и сравнивают ее с запомненной. При совпадении кодов измеряют время относительного запаздывания колебаний Atn в верхней антенне, на основе чего определяют порядковые номера совпадений п по формуле п fn At, округляя полученные значения п до ближайшего целого числа, Полученные значения п используют для определения координат точек морской поверхности в полосе обзора фазовой гидролокации бокового обзора. 2 ил, (Л С v| О ел э ю ел
Формула изобретения
Способ измерения глубин в полосе бокового обзора фазового гидролокатора, включающий излучение гидроакустических колебаний и прием рассеянных дном колебаний в двух точках, разнесенных в вертикальной плоскости на расстояние в несколько длин волн несущей частоты fH, измерение разности фаз колебаний в этих точках, измерение временных интервалов tn между моментом излучения и фиксированными моментами кратности измеренной разности фаз колебаний целому числу 2л,
определение порядковых номеров п этих моментов и по полученным данным вычисление искомых глубин, отличающийся тем, что, с целью повышения достоверности определения глубин путем исключения пропусков в определении порядковых номеров п, дополнительно измеряют периоды сравниваемых колебаний на заданном временном интервале от момента начала фиксации кратности разности фаз колебаний целому числу In, определяют и запоминают характер изменения периодов на этом интервале в виде кода, относящегося к нижней точке приема, определяют текущую кодовую по
tn
Формирователь Kofa Ю
ПьпепПсПаПьП iiiiiiiil....... рдШрцД).
ФормироВатем
коёа 14 Пс ПьПаП ПсП П ПСПОГП П
I liiiiial llliliil liiiuiii lllUliiiiii lilij limiii Ilinul llliiMJ.
| Патент США № 4024490, кл.340-ЗН, 1977 | |||
| Stubbs А.К,, Me Carthey B.S | |||
| Legg I.G | |||
| Telesoundlng a methood of wide swathe a depth mesaurement, Internationa Hydrographlc 1974, 51, p.p.23-59 |
