Изобретение относится к области гидроакустики и предназначено для дистанционных акустических измерений рельефа и осадки подводной части айсберга (ПЧА) из-под воды.
Известны способы дистанционного определения осадки и рельефа ПЧА с помощью гидроакустических средств, которые описаны, например, в [1, 2]. В первом из них [1] в качестве гидроакустического средства используется жестко закрепленный на корпусе надводного судна-носителя гидролокатор бокового обзора (ГБО), акустическая антенна которого находится на некоторой фиксированной глубине относительно поверхности воды. ГБО периодически, по мере движения судна-носителя на некотором удалении вокруг айсберга, озвучивает ПЧА в направлении от поверхности моря к его дну, обеспечивая тем самым формирование на индикаторе яркостного гидролокационного изображения ПЧА, по которому можно определить его форму и осадку.
Основным недостатком способа, описанного в работе [1], является отсутствие возможности измерения рельефа озвученной поверхности (относительных углов наклона и высот) подводной части айсберга, что не позволяет достоверно оценивать действительную форму ПЧА. Фактически упомянутый способ позволяет оценивать только осадку айсберга в направлении зондирования и его протяженность в направлении, перпендикулярном направлению зондирования.
Наиболее близким аналогом предлагаемого способа, выбранным в качестве прототипа, является способ, описанный в [2]. Этот способ определения осадки айсберга и формы его подводной части с надводного объекта (судна) характеризуется следующими операциями:
- подход судна-носителя с установленным на нем опускаемым гидролокатором бокового обзора к надводной части айсберга на некоторое расстояние, лежащее в пределах от 100 до 200 м;
- остановка судна на некотором фиксированном расстоянии от надводной части айсберга, удержание судна в окрестностях точки остановки;
- включение ГБО в режим обследования поверхности ПЧА и последующее опускание ГБО с постоянной скоростью на глубину для снятия первого (по счету) рельефа поверхности ПЧА;
- наблюдение и регистрация гидролокационного изображения ПЧА на устройстве отображения ГБО до его исчезновения с экрана;
- немедленная остановка погружения ГБО сразу после исчезновения гидролокационного изображения ПЧА с экрана устройства отображения и одновременная фиксация момента времени от начала погружения и глубины погружения антенн ГБО, рассчитываемой по данным встроенного в ГБО датчика гидростатического давления;
- после остановки подъем ГБО с постоянной скоростью с наблюдением и регистрацией гидролокационного изображения ПЧА до глубины, с которой было начато погружение;
- остановка работы программного обеспечения ГБО, переход судна в следующую точку наблюдения, расположенную на траектории обхода айсберга судном и повторение описанной выше процедуры наблюдения и регистрации гидролокационного изображения ПЧА.
По гидролокационным изображениям поверхности ПЧА, полученным в фиксированных точках траектории обхода айсберга, вычисляются дальности и углы места самых удаленных от антенн ГБО точек поверхности, которые затем используются для построения рельефа ПЧА справа и слева от направления, по которому погружался и поднимался ГБО. Процедура «профилирования» айсберга тогда считается завершенной, когда получен набор рельефов на замкнутой траектории (окружности) в диапазоне углов 360° вокруг айсберга. По набору плоских профилей рельефов может быть построен трехмерный рельеф обследованной гидролокатором поверхности, а затем с использованием данных измерения надводной части айсберга синтезирована и трехмерная форма ПЧА с определением ее реальных геометрических размеров.
Основным недостатком способа, описанного в работе [2], является большая трудоемкость способа, определяемая необходимостью многократных операций по спуску и подъему гидроакустического средства (в данном случае ГБО) при «профилировании» ПЧА и необходимости удержания судна-носителя на определенном расстоянии от айсберга в течение всего цикла «спуск-подъем».
Задачей изобретения является обеспечение возможности измерения рельефа поверхности ПЧА и, следовательно, определения их формы и осадки без процедуры погружения и подъема гидролокатора и на ходу судна-носителя.
Технический результат заключается в снижении трудоемкости и повышении технологичности способа.
Для достижения указанного технического результата в способ определения осадки и формы подводных частей айсбергов, включающий излучение импульсных зондирующих сигналов в направлении ПЧА антеннами, опускаемыми с борта судна-носителя, прием акустических эхо-сигналов, рассеянных озвученной поверхностью ПЧА, и одновременное измерение с помощью датчика гидростатического давления глубины погружения антенн, введены новые признаки, а именно излучение импульсных зондирующих сигналов производят излучающей антенной гидроакустического интерферометра, прием эхо-сигналов от айсберга производят двумя приемными антеннами гидроакустического интерферометра, находящимися на фиксированном заглублении от поверхности воды и разнесенными в горизонтальной плоскости на расстояние D, являющееся базой интерферометра, при этом обе приемные антенны интерферометра имеют узкую характеристику направленности (ХН) в плоскости большего размера приемной антенны интерферометра и широкую ХН в плоскости меньшего размера приемной антенны интерферометра, прием эхо-сигналов обеими приемными антеннами производят в диапазоне углов Θ, охватываемых их ХН, по интерференционной картине измеряют расстояния между нулевой линией, соответствующей середине базы интерферометра, и серединой интерференционной полосы, соответствующей точкам рассеяния от поверхности ПЧА принятых эхо-сигналов, пропорциональные удалению этих точек рассеяния от середины базы интерферометра, с помощью масштабной линейки определяют наклонные дальности ri точек рассеяния эхо-сигнала до середины базы интерферометра по формуле  , где i=1, 2, 3… - номер интерференционной полосы, отсчитываемый от нулевой линии на интерференционной картине, соответствующей моменту излучения зондирующего сигнала, λ0 - длина волны принимаемого эхо-сигнала, определяют расстояние zi каждой i-й точки рассеяния от поверхности ПЧА относительно горизонтальной плоскости, проходящей через середину базы интерферометра, по формуле
, где i=1, 2, 3… - номер интерференционной полосы, отсчитываемый от нулевой линии на интерференционной картине, соответствующей моменту излучения зондирующего сигнала, λ0 - длина волны принимаемого эхо-сигнала, определяют расстояние zi каждой i-й точки рассеяния от поверхности ПЧА относительно горизонтальной плоскости, проходящей через середину базы интерферометра, по формуле  определяют вертикальное расстояние xi от середины базы интерферометра 0 до каждой i-й точки рассеяния, используя вычисленные значения координаты xi и известное значение заглубления h0 антенн интерферометра относительно поверхности воды, вычисляют значения осадки hi каждой i-й точки рассеяния на поверхности ПЧА по формуле hi=xi+h0 вплоть до точки M(xM, zM), соответствующей осадке айсберга Ha; по формуле Δzi=zi-zэ, где zэ - кратчайшее расстояние от середины базы интерферометра до поверхности ПЧА, которое измеряют с помощью эхолота, закрепленного вместе с приемными антеннами интерферометра на корпусе судна-носителя, вычисляют с учетом значения заглубления антенн интерферометра h0 ординаты точек поверхности ПЧА относительно уровня z=zэ в данном цикле зондирования в диапазоне глубин, соответствующих диапазону углов Θ, охватываемых характеристиками направленности антенн интерферометра, используя пары чисел Δzi xi строят профиль рельефа ПЧА в плоскости x0z относительно уровня z=zэ, повторяют последовательное импульсное акустическое зондирование ПЧА в процессе движения судна-носителя акустической системы по замкнутой траектории обхода айсберга с периодической привязкой результатов очередного цикла зондирования к направлению, времени и угловому положению относительно стран света точек зондирования, осуществляемой с помощью измерения угла ϕ, отсчитываемого от истинного траверса
определяют вертикальное расстояние xi от середины базы интерферометра 0 до каждой i-й точки рассеяния, используя вычисленные значения координаты xi и известное значение заглубления h0 антенн интерферометра относительно поверхности воды, вычисляют значения осадки hi каждой i-й точки рассеяния на поверхности ПЧА по формуле hi=xi+h0 вплоть до точки M(xM, zM), соответствующей осадке айсберга Ha; по формуле Δzi=zi-zэ, где zэ - кратчайшее расстояние от середины базы интерферометра до поверхности ПЧА, которое измеряют с помощью эхолота, закрепленного вместе с приемными антеннами интерферометра на корпусе судна-носителя, вычисляют с учетом значения заглубления антенн интерферометра h0 ординаты точек поверхности ПЧА относительно уровня z=zэ в данном цикле зондирования в диапазоне глубин, соответствующих диапазону углов Θ, охватываемых характеристиками направленности антенн интерферометра, используя пары чисел Δzi xi строят профиль рельефа ПЧА в плоскости x0z относительно уровня z=zэ, повторяют последовательное импульсное акустическое зондирование ПЧА в процессе движения судна-носителя акустической системы по замкнутой траектории обхода айсберга с периодической привязкой результатов очередного цикла зондирования к направлению, времени и угловому положению относительно стран света точек зондирования, осуществляемой с помощью измерения угла ϕ, отсчитываемого от истинного траверса  айсберга в первом цикле зондирования, в результате чего получают ансамбль из n профилей рельефов ПЧА, которые используют для построения ее трехмерной формы.
айсберга в первом цикле зондирования, в результате чего получают ансамбль из n профилей рельефов ПЧА, которые используют для построения ее трехмерной формы.
Наилучший результат получается, если излучающая антенна интерферометра расположена в средней точке его базы, а приемоизлучающая антенна эхолота расположена на минимально возможном расстоянии от средней точки базы.
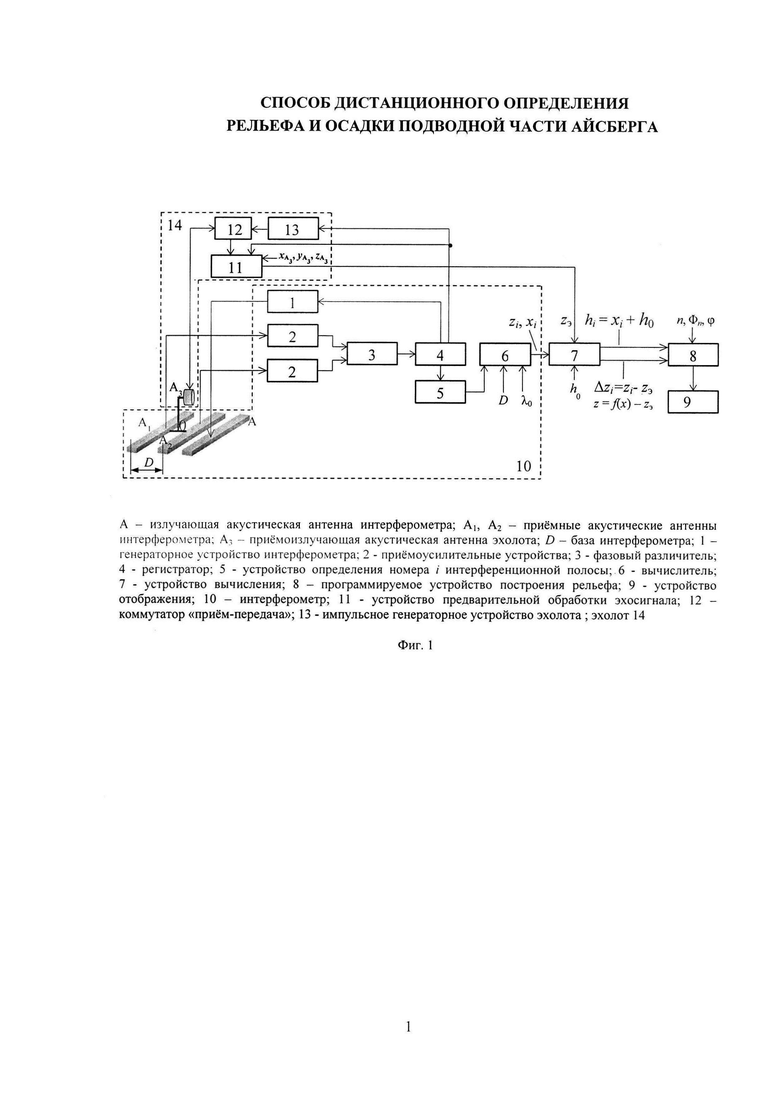
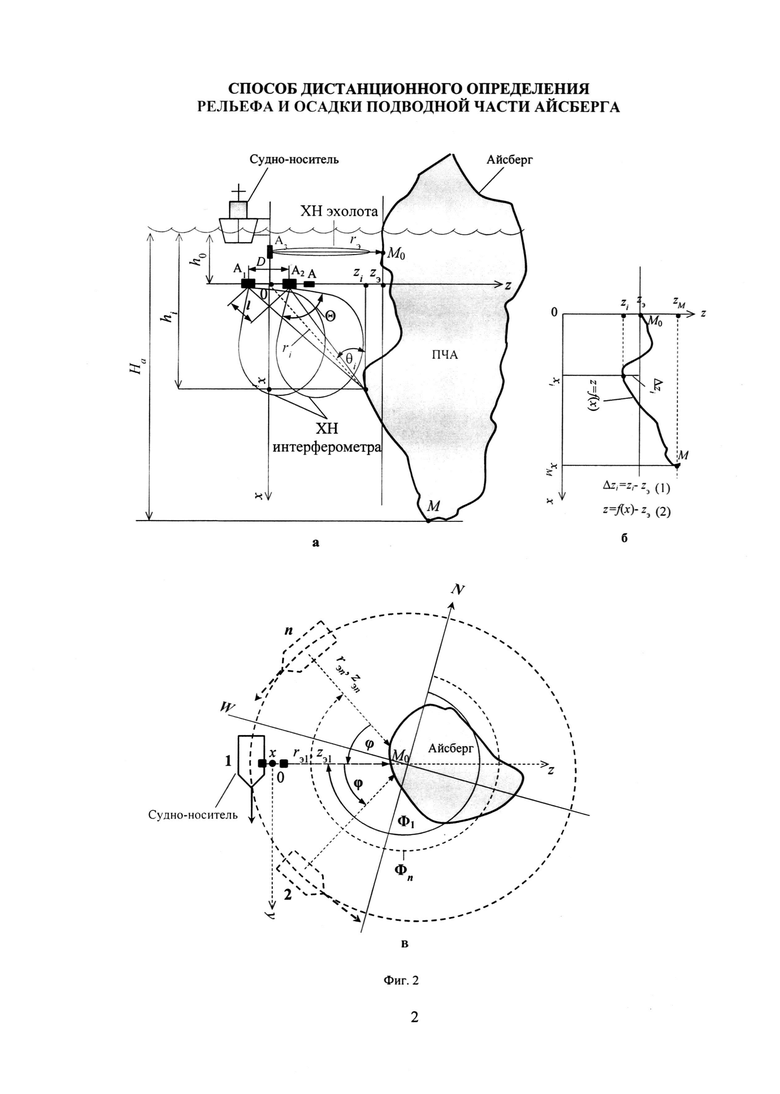
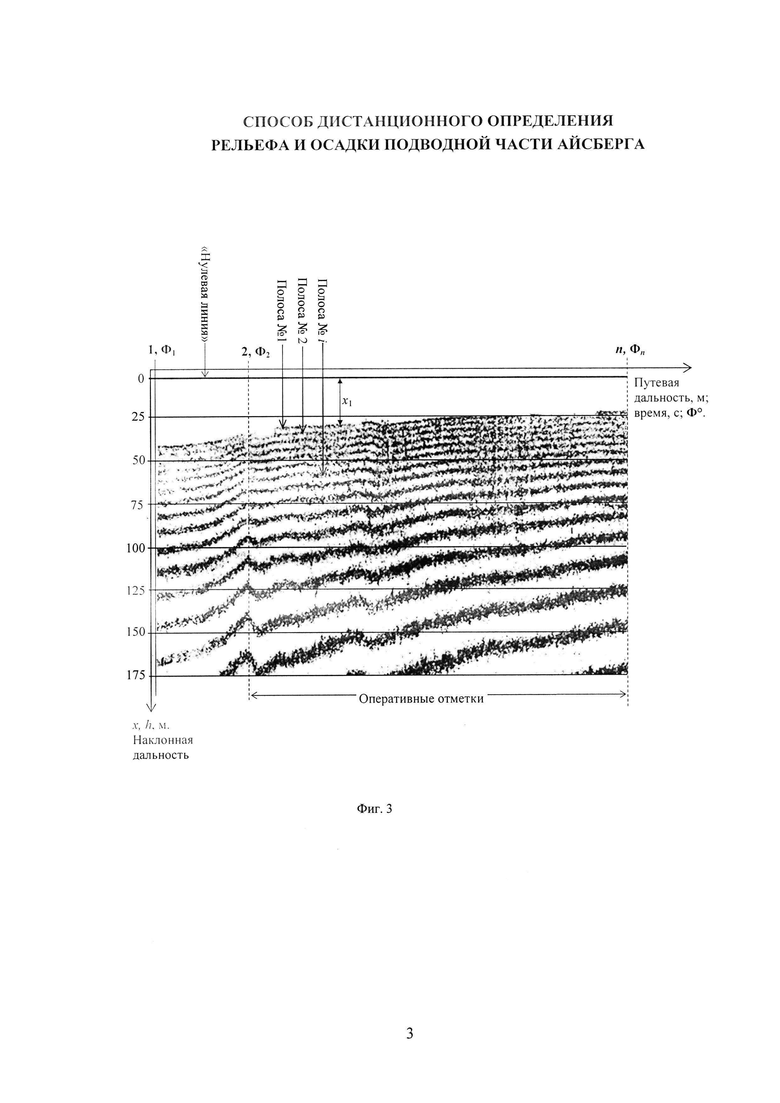
Сущность способа поясняется фиг. 1-3. На фиг. 1 приведена структурная схема устройства, реализующего способ, на фиг. 2а, в приведены схемы применения предлагаемого способа, фиг. 2б поясняет процедуру построения профиля ПЧА, на фиг. 3 представлен вид интерференционной картины с оперативными отметками на выходе интерферометра.
Структурная схема, представленная на фиг. 1, содержит излучающую акустическую антенну интерферометра A; приемные акустические антенны интерферометра A1, A2; приемоизлучающую акустическую антенну эхолота A3; генераторное устройство 1 интерферометра; приемоусилительные устройства 2 интерферометра; фазовый различитель 3; регистратор (индикатор) интерференционной картины и синхронизатор работы системы 4; устройство 5 определения номера i интерференционной полосы; вычислитель 6 координаты zi и вертикального расстояния (глубины) xi от середины базы интерферометра 0 до каждой i-й точки ПЧА; устройство 7 вычисления осадки hi, ординат Δzi точек поверхности ПЧА относительно уровня z=zэ в каждом цикле зондирования и построения функции  для каждого цикла зондирования; программируемое устройство 8 построения рельефа поверхности ПЧА по ансамблю из n профилей рельефов ; устройство 9 отображения рельефа ПЧА; интерферометр 10; устройство 11 предварительной обработки эхо-сигнала эхолота и измерения расстояния rэ; коммутатор 12 «прием-передача»; импульсное генераторное устройство 13 эхолота; эхолот 14.
для каждого цикла зондирования; программируемое устройство 8 построения рельефа поверхности ПЧА по ансамблю из n профилей рельефов ; устройство 9 отображения рельефа ПЧА; интерферометр 10; устройство 11 предварительной обработки эхо-сигнала эхолота и измерения расстояния rэ; коммутатор 12 «прием-передача»; импульсное генераторное устройство 13 эхолота; эхолот 14.
Блоки 1-6 технически представляют собой типовые функциональные узлы стандартных интерферометрических ГБО, известных, например, из [3]. Блоки 7-9 представляют собой электронные приборы, алгоритмы работы которых реализованы с помощью аналоговых и цифровых программируемых средств, например в судовых многолучевых эхолотах, обеспечивающих построение 3D изображений поверхности дна акваторий. Блоки 11-13 являются типовыми функциональными узлами высокочастотных судовых эхолотов, в частности навигационных, подробно рассмотренных, например, в [4].
На фиг. 2а в проекции на вертикальную плоскость изображены:
0 - средняя точка базы интерферометра;
 - геометрическая разность хода эхо-сигнала от некоторой точки поверхности ПЧА i до антенн интерферометра;
- геометрическая разность хода эхо-сигнала от некоторой точки поверхности ПЧА i до антенн интерферометра;
0, x, y, z - прямоугольная система координат, связанная с судном-носителем: начало координат 0 совпадает со средней точкой базы интерферометра, ось y совпадает с продольной осью судна-носителя;
zэ=rэ - кратчайшее расстояние от середины базы интерферометра (точка 0) до поверхности ПЧА (точка M0), измеряемое с помощью эхолота;
ri - наклонная дальность от базы интерферометра до i-й точки озвученной поверхности ПЧА;
zi - высота точки поверхности льда относительно вертикальной плоскости, перпендикулярной базе и проходящей через среднюю точку базы интерферометра;
Θ - ширина XH приемных антенн интерферометра в вертикальной плоскости;
θi - угол скольжения акустического луча в i-й точке;
xi - вертикальное расстояние (глубина) от середины базы интерферометра 0 до каждой i-й точки поверхности ПЧА, равное проекции наклонной дальности ri на координатную ось x;
h0 - заглубление (осадка) средней точки базы интерферометра относительно поверхности воды;
hi - осадка i-й точки поверхности ПЧА;
Ha - осадка айсберга;
Фиг. 2б поясняет процедуру построения профиля ПЧА относительно уровня z=z0 в каждом цикле зондирования. Фрагмент профиля поверхности ПЧА в сечении плоскостью x0z представлен как некоторая функция координаты  . Значения Δzi, представляющие собой отклонения значений функции
. Значения Δzi, представляющие собой отклонения значений функции  от уровня zэ, вычисляются по выражениям (1) и (2). Пары чисел Δzi, xi описывают профиль рельефа ПЧА в плоскости x0z относительно уровня z=zэ.
от уровня zэ, вычисляются по выражениям (1) и (2). Пары чисел Δzi, xi описывают профиль рельефа ПЧА в плоскости x0z относительно уровня z=zэ.
На фиг. 2в в проекции на горизонтальную плоскость изображены:
1, 2…n, 1 - последовательные положения судна-носителя в точках траектории обхода айсберга;
ϕ - некоторый постоянный угол, отсчитываемый от истинного траверса айсберга Ф, определяющий точки траектории обхода айсберга, в которых осуществляется акустическое зондирование ПЧА;
 - угол, соответствующий истинному траверсу айсберга относительно судна-носителя в точках траектории обхода, где осуществляется зондирование ПЧА.
- угол, соответствующий истинному траверсу айсберга относительно судна-носителя в точках траектории обхода, где осуществляется зондирование ПЧА.
На фиг. 3 представлен вид интерференционной картины на выходе интерферометра. На поле рисунка изображены: «нулевая линия» (начало отсчета наклонной дальности), соответствующая моменту излучения интерферометром зондирующего сигнала, x1 - расстояние от нулевой линии до первой интерференционной полосы, соответствующее наклонной дальности r1 до точки поверхности ПЧА.
Способ характеризуется следующими операциями:
В некоторый момент времени излучающая антенна A интерферометра (фиг. 1) излучает в сторону ПЧА акустический импульсный зондирующий радиосигнал, сформированный генераторным устройством 1 интерферометра по синхроимпульсу, вырабатываемому синхронизатором 4 работы системы и регистратором (индикатором) интерференционной картины. Поскольку ось характеристики направленности (ХН) антенны интерферометра A в вертикальной плоскости лежит в плоскости x0z, перпендикулярной диаметральной плоскости судна-носителя интерферометра (фиг. 2а), происходит облучение ПЧА акустической энергией в направлении, перпендикулярном линии курса судна-носителя. Вследствие узкой в плоскости  размера антенны и широкой в плоскости ее меньшего размера XH излучающей антенны A интерферометра облучается узкая в плоскости горизонта и широкая по глубине полоса льда на ПЧА.
размера антенны и широкой в плоскости ее меньшего размера XH излучающей антенны A интерферометра облучается узкая в плоскости горизонта и широкая по глубине полоса льда на ПЧА.
После излучения зондирующего сигнала интерферометр переходит в режим приема эхо-сигналов, рассеянных озвученной поверхностью ПЧА. Прием эхо-сигналов производится двумя разнесенными в горизонтальной плоскости приемными акустическими антеннами A1 и A2 (фиг. 1). Первыми к антеннам A1 и A2 приходят эхо-сигналы от наиболее близких точек, затем от все более удаленных точек облученной полосы льда. Принятые антеннами акустические эхо-сигналы преобразуются в электрическое и после усиления и детектирования в приемоусилительных устройствах 2 интерферометра 10 поступают на фазовый различитель 3 и далее на регистратор (индикатор) интерференционной картины и синхронизатор работы системы 4.
Если геометрическая разность хода  эхо-сигнала от некоторой точки i ПЧА до антенн интерферометра A1 и A2, зависящая от базы интерферометра D и угла скольжения акустического луча θi в i-й точке, равна целому числу длин волн λ0 принимаемого эхо-сигнала, т.е.
эхо-сигнала от некоторой точки i ПЧА до антенн интерферометра A1 и A2, зависящая от базы интерферометра D и угла скольжения акустического луча θi в i-й точке, равна целому числу длин волн λ0 принимаемого эхо-сигнала, т.е.  , где i=1, 2, 3, …, то при сложении напряжений эхо-сигналов, снимаемых с выходов антенн A1 и A2, суммарный сигнал будет равен сумме напряжений этих сигналов. Если
, где i=1, 2, 3, …, то при сложении напряжений эхо-сигналов, снимаемых с выходов антенн A1 и A2, суммарный сигнал будет равен сумме напряжений этих сигналов. Если  , то суммарный сигнал будет равен их разности. Указанный эффект обусловлен интерференцией эхо-сигналов от точки поверхности ПЧА, принятых разнесенными по вертикали антеннами интерферометра.
, то суммарный сигнал будет равен их разности. Указанный эффект обусловлен интерференцией эхо-сигналов от точки поверхности ПЧА, принятых разнесенными по вертикали антеннами интерферометра.
В процессе приема и суммирования эхо-сигналов в фазовом различителе 3, приходящих от все более удаленных точек облученной полосы льда, будет формироваться интерференционная картина, которая будучи зарегистрированной на яркостном регистраторе 4 с прямоугольной растровой разверткой в координатах «путевая дальность» - «наклонная дальность», будет представлять собой чередующиеся темные и светлые полосы (интерференционные полосы), как это показано на фиг. 3. Координата «путевая дальность» отсчитывается от точки  (фиг. 2в).
(фиг. 2в).
Каждая интерференционная полоса на интерференционной картине имеет свой номер, равный целому числу i длин волн λ0, характеризующих разность хода  . Иными словами i - это номер интерференционной полосы на интерференционной картине или номер интерференционного лепестка в XH антенны интерферометра, ось одного из которых (i-го) изображена на фиг. 2а пунктиром. Номер интерференционной полосы от начала интерференционной картины определяется в устройстве 5 определения номера i интерференционной полосы. Интерференционные полосы удалены от «нулевой линии» (начала отсчета наклонной дальности), соответствующей моменту излучения интерферометром зондирующего сигнала, на расстояния xi, пропорциональные соответствующим наклонным дальностям ri до точек облученной поверхности (фиг. 3). Измеряются эти наклонные дальности с помощью масштабной линейки, функционально реализованной в регистраторе интерференционной картины и синхронизаторе работы системы 4. Измерения проводятся от нулевой линии интерференционной картины. Наклонная дальность ri (фиг. 2а) до точки пересечения поверхности ПЧА с осью i-го интерференционного лепестка связана с высотой zi этой точки в плоскости x0z, образованной прямоугольной системой координат 0, x, y, z, связанной с судном-носителем, у которой начало координат 0 совпадает со средней точкой базы интерферометра, а ось y совпадает с продольной осью судна-носителя, соотношением
. Иными словами i - это номер интерференционной полосы на интерференционной картине или номер интерференционного лепестка в XH антенны интерферометра, ось одного из которых (i-го) изображена на фиг. 2а пунктиром. Номер интерференционной полосы от начала интерференционной картины определяется в устройстве 5 определения номера i интерференционной полосы. Интерференционные полосы удалены от «нулевой линии» (начала отсчета наклонной дальности), соответствующей моменту излучения интерферометром зондирующего сигнала, на расстояния xi, пропорциональные соответствующим наклонным дальностям ri до точек облученной поверхности (фиг. 3). Измеряются эти наклонные дальности с помощью масштабной линейки, функционально реализованной в регистраторе интерференционной картины и синхронизаторе работы системы 4. Измерения проводятся от нулевой линии интерференционной картины. Наклонная дальность ri (фиг. 2а) до точки пересечения поверхности ПЧА с осью i-го интерференционного лепестка связана с высотой zi этой точки в плоскости x0z, образованной прямоугольной системой координат 0, x, y, z, связанной с судном-носителем, у которой начало координат 0 совпадает со средней точкой базы интерферометра, а ось y совпадает с продольной осью судна-носителя, соотношением

В свою очередь из фиг. 2а следует, что

Объединяя (1) и (2), получим

Вертикальное расстояние (глубина) от середины базы интерферометра 0 до каждой i-й точки поверхности ПЧА - xi может быть определено по формуле

Таким образом, интерференционная картина однозначно связана с рельефом поверхности ПЧА и может быть использована при определении высот и глубин от середины базы интерферометра в широкой полосе обзора. Для этого в вычислителе 6 по определенным номерам интерференционных полос i, измеренным наклонным дальностям ri и по известному для данного интерферометра соотношению  , используя выражения (3) и (4), выполняются расчеты высот zi и глубин xi относительно середины базы интерферометра 0 (фиг. 2а).
, используя выражения (3) и (4), выполняются расчеты высот zi и глубин xi относительно середины базы интерферометра 0 (фиг. 2а).
Далее по рассчитанным значениям xi в устройстве 7 осуществляется вычисление глубины погружения или осадки hi i-й точки поверхности ПЧА (фиг. 2а) относительно поверхности воды по формуле

где h0 (фиг. 2а) - измеренное при установке интерферометра на судно-носитель значение заглубления (осадки) средней точки базы интерферометра относительно поверхности воды или действительной ватерлинии судна. После приема эхо-сигнала от наиболее удаленной точки M (фиг. 2а) облученной полосы льда режим приема интерферометра заканчивается.
Сразу же по окончании режима приема интерферометра по синхроимпульсу, вырабатываемому синхронизатором 4, начинает работу эхолот 14. На приемоизлучающую акустическую антенну A3 эхолота 14, ось характеристики направленности которой ориентирована по нормали к диаметральной плоскости судна-носителя, поступает через коммутатор 12 импульсный зондирующий радиосигнал, вырабатываемый импульсном генераторным устройством 13 эхолота. Акустическая антенна A3 эхолота преобразует этот электрический радиосигнал в акустический и излучает его в сторону ПЧА, после чего эхолот переходит в режим приема эхо-сигнала, отраженного от ближайшей к нему точки поверхности ПЧА (на фиг. 2а, в - точка M0). В устройстве 11 по измеренному времени запаздывания t3 эхо-сигнала относительно зондирующего радиосигнала и известной скорости звука в воде с осуществляется измерение расстояния rэ до ближайшей к антенне А3 эхолота точки поверхности ПЧА по формуле

Затем, учитывая действительные координаты 


Используя значение координаты zэ в устройстве 7 для каждого цикла зондирования по формуле

вычисляют ординаты точек Δzi поверхности ПЧА относительно уровня z=zэ (фиг. 2б) в каждом цикле зондирования. Пары чисел Δzi, xi характеризуют профиль рельефа ПЧА в плоскости x0z, но уже не относительно уровня, проходящего через начало координат z=0, а относительно уровня z=zэ. Значения Δzi могут быть представлены как некоторая функция  координаты x (или координаты h=х+h0), меняющейся в некоторых пределах, определяемых осадкой айсберга Ha (фиг. 2а), построение которой осуществляется в этом же устройстве. На этом работа эхолота заканчивается и цикл «профилирования» ПЧА повторяется.
координаты x (или координаты h=х+h0), меняющейся в некоторых пределах, определяемых осадкой айсберга Ha (фиг. 2а), построение которой осуществляется в этом же устройстве. На этом работа эхолота заканчивается и цикл «профилирования» ПЧА повторяется.
Для получения профиля поверхности ПЧА за пределами облученной в одном цикле зондирования узкой в плоскости горизонта и широкой по глубине полосы льда на ПЧА судно-носитель и вместе с ним и интерферометр с эхолотом должны быть перемещены в другую точку траектории обхода айсберга, после чего интерферометр и эхолот излучат в сторону поверхности ПЧА очередной акустический импульсный зондирующий радиосигнал и примут соответствующие эхо-сигналы от ПЧА. По мере движения судна-носителя интерферометра и эхолота по траектории обхода айсберга облучаются новые, примыкающие друг к другу полосы поверхности ПЧА, эхо-сигналы от которых принимаются и обрабатываются интерферометром 10 и эхолотом 14. Одновременно с облучением поверхности ПЧА фиксируются и наносятся на интерферограмму в виде оперативных отметок (фиг. 3) текущий номер профиля n, текущее время и значения истинного траверса айсберга  для различных точек траектории обхода (фиг. 2в, 3). Этот процесс продолжается до тех пор, пока судно-носитель не «замкнет» траекторию обхода айсберга, т.е. не придет в исходную точку начала «профилирования».
для различных точек траектории обхода (фиг. 2в, 3). Этот процесс продолжается до тех пор, пока судно-носитель не «замкнет» траекторию обхода айсберга, т.е. не придет в исходную точку начала «профилирования».
Полученный при обходе по замкнутой траектории обхода ансамбль профилей рельефов ПЧА вида  с привязкой каждого профиля к конкретному моменту времени и значению угла накапливаются в программируемом устройстве 8, где осуществляется также построение трехмерной формы ПЧА вида , которая затем может быть визуально отображена на устройстве отображения рельефа ПЧА 9.
с привязкой каждого профиля к конкретному моменту времени и значению угла накапливаются в программируемом устройстве 8, где осуществляется также построение трехмерной формы ПЧА вида , которая затем может быть визуально отображена на устройстве отображения рельефа ПЧА 9.
Таким образом, описанный выше способ обеспечивает возможность измерения рельефа поверхности ПЧА и, следовательно, определение ее формы и осадки на ходу судна-носителя и без процедуры погружения и подъема гидролокатора, что существенно снижает трудоемкость процесса и повышает его технологичность.
Источники информации
1. Богородский А.В., Попов И.К. Инструментальные исследования подводных частей айсбергов Южного океана // Труды ААНИИ. 1978. Т. 359. С. 134-138.
2. Determination of Iceberg Draft and Shape // Prepared By: Oceans Ltd., 85 LeMarchant Road, St. John's, NL, Canada, A1C 2H1. June 2004, PERD/CHC Report 20-75.
3. Барась С.Т. Исследование и разработка гидролокационного интерферометра для картографической съемки дна в широкой полосе обзора. Дис… канд. техн. наук / ОКБ «Риф». Г. Бельцы, 1981, 210 с.
4. Хребтов А.А. Судовые эхолоты. - Л.: Судостроение, 1982. - 232 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ОСАДКИ, ТОЛЩИНЫ И ВЫСОТЫ ЛЬДА | 2012 |
|
RU2500985C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2015 |
|
RU2615050C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2011 |
|
RU2461845C1 |
| Устройство для съемки подводной поверхности айсберга | 2021 |
|
RU2771434C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2014 |
|
RU2572666C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
Изобретение относится к области гидроакустики и предназначено для дистанционных акустических измерений рельефа и осадки подводной части айсберга (ПЧА) из-под воды. Сущность способа состоит в использовании свойства гидролокационного интерферометра, реализованного в виде интерферометрического гидролокатора бокового обзора, измерять в широкой полосе обзора высоты zi точек озвученной поверхности подводной части айсберга (ПЧА) относительно плоскости, проходящей через середину базы интерферометра и перпендикулярной его базе, а также горизонтальные дальности xi от середины базы интерферометра до этих точек поверхности ПЧА, с последующими вычислениями осадки hi каждой i-й точки на поверхности ПЧА с использованием известного заглубления антенн интерферометра относительно поверхности воды h0, а также вычислением ординат Δzi=zi-zэ точек поверхности ПЧА относительно уровня z=zэ, где zэ - кратчайшее расстояние от середины базы интерферометра до поверхности ПЧА, измеряемое с помощью горизонтально направленного эхолота в каждом цикле зондирования. Таким образом, предложенный способ позволяет при обходе айсберга судном-носителем эхолота и интерферометра определить рельеф ПЧА и его осадку на ходу судна-носителя без процедуры погружения и подъема гидролокатора бокового обзора в точках траектории обхода айсберга, что существенно снижает трудоемкость процесса и повышает его технологичность. 1 з.п. ф-лы, 3 ил. 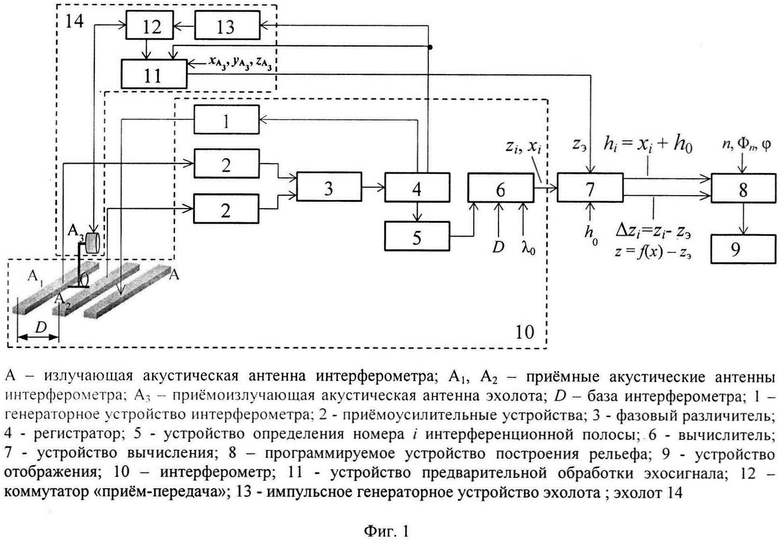
1. Способ определения рельефа и осадки подводной части айсберга (ПЧА), включающий излучение импульсных зондирующих сигналов в направлении ПЧА и прием эхо-сигналов, рассеянных озвученной поверхностью ПЧА антеннами, опускаемыми с борта судна-носителя, и одновременное измерение с помощью датчика гидростатического давления глубины погружения антенн, отличающийся тем, что излучение импульсных зондирующих сигналов производят излучающей антенной гидроакустического интерферометра, прием эхо-сигналов от айсберга производят двумя приемными антеннами гидроакустического интерферометра, находящимися на фиксированном заглублении от поверхности воды и разнесенными в горизонтальной плоскости на расстояние D, являющееся базой интерферометра, при этом обе приемные антенны интерферометра имеют узкую характеристику направленности (ХН) в плоскости большего размера приемной антенны интерферометра и широкую ХН в плоскости меньшего размера приемной антенны интерферометра, прием эхо-сигналов обеими приемными антеннами производят в диапазоне углов Θ, охватываемых их ХН, по интерференционной картине измеряют расстояния между нулевой линией, соответствующей середине базы интерферометра и серединой интерференционной полосы, соответствующей точкам рассеяния от поверхности ПЧА принятых эхо-сигналов, пропорциональные удалению этих точек рассеяния от середины базы интерферометра, с помощью масштабной линейки определяют наклонные дальности ri точек рассеяния эхо-сигнала до середины базы интерферометра, по формуле  , где i = 1, 2, 3… - номер интерференционной полосы, отсчитываемый от нулевой линии на интерференционной картине, соответствующей моменту излучения зондирующего сигнала, λ0 - длина волны принимаемого эхо-сигнала, определяют расстояние zi каждой i-й точки рассеяния от поверхности ПЧА относительно горизонтальной плоскости, проходящей через середину базы интерферометра, по формуле
, где i = 1, 2, 3… - номер интерференционной полосы, отсчитываемый от нулевой линии на интерференционной картине, соответствующей моменту излучения зондирующего сигнала, λ0 - длина волны принимаемого эхо-сигнала, определяют расстояние zi каждой i-й точки рассеяния от поверхности ПЧА относительно горизонтальной плоскости, проходящей через середину базы интерферометра, по формуле  определяют вертикальное расстояние xi от середины базы интерферометра до каждой i-й точки рассеяния, используя вычисленные значения координаты xi и известное значение заглубления h0 антенн интерферометра относительно поверхности воды, вычисляют значения осадки hi каждой i-й точки рассеяния на поверхности ПЧА по формуле hi=xi+h0 вплоть до точки М(хМ, zM), соответствующей осадке айсберга На; по формуле Δzi=zi-zэ, где zэ - кратчайшее расстояние от середины базы интерферометра до поверхности ПЧА, которое измеряют с помощью эхолота, закрепленного вместе с приемными антеннами интерферометра на корпусе судна-носителя, вычисляют с учетом значения заглубления антенн интерферометра h0 ординаты точек поверхности ПЧА относительно уровня z=zэ в данном цикле зондирования в диапазоне глубин, соответствующих диапазону углов Θ, охватываемых ХН приемных антенн интерферометра и, используя пары чисел Δzi, xi, строят профиль рельефа ПЧА в плоскости x0z относительно уровня z=zэ, повторяют последовательное импульсное акустическое зондирование ПЧА и процедуру построения профиля рельефа ПЧА в процессе движения судна-носителя акустической системы по замкнутой траектории обхода айсберга с периодической привязкой результатов очередного цикла зондирования к направлению, времени и угловому положению относительно стран света точек зондирования, осуществляемой с помощью измерения угла ϕ, отсчитываемого от истинного траверса Ф1 айсберга в первом цикле зондирования, получают ансамбль из n профилей рельефов ПЧА, которые используют для построения ее трехмерной формы.
определяют вертикальное расстояние xi от середины базы интерферометра до каждой i-й точки рассеяния, используя вычисленные значения координаты xi и известное значение заглубления h0 антенн интерферометра относительно поверхности воды, вычисляют значения осадки hi каждой i-й точки рассеяния на поверхности ПЧА по формуле hi=xi+h0 вплоть до точки М(хМ, zM), соответствующей осадке айсберга На; по формуле Δzi=zi-zэ, где zэ - кратчайшее расстояние от середины базы интерферометра до поверхности ПЧА, которое измеряют с помощью эхолота, закрепленного вместе с приемными антеннами интерферометра на корпусе судна-носителя, вычисляют с учетом значения заглубления антенн интерферометра h0 ординаты точек поверхности ПЧА относительно уровня z=zэ в данном цикле зондирования в диапазоне глубин, соответствующих диапазону углов Θ, охватываемых ХН приемных антенн интерферометра и, используя пары чисел Δzi, xi, строят профиль рельефа ПЧА в плоскости x0z относительно уровня z=zэ, повторяют последовательное импульсное акустическое зондирование ПЧА и процедуру построения профиля рельефа ПЧА в процессе движения судна-носителя акустической системы по замкнутой траектории обхода айсберга с периодической привязкой результатов очередного цикла зондирования к направлению, времени и угловому положению относительно стран света точек зондирования, осуществляемой с помощью измерения угла ϕ, отсчитываемого от истинного траверса Ф1 айсберга в первом цикле зондирования, получают ансамбль из n профилей рельефов ПЧА, которые используют для построения ее трехмерной формы.
2. Способ по п. 1, отличающийся тем, что излучающая антенна интерферометра расположена в средней точке его базы, а приемоизлучающая антенна эхолота расположена на минимально возможном расстоянии от средней точки базы.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2013 |
|
RU2549683C2 |
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2444760C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2014 |
|
RU2548596C1 |
| US 2008295599 A1, 04.12.2008. | |||

