Изобретение относится к области автоматики и вычислительной техники и может быть использовано для углового перемещения вала сельсина в имитаторах и тренажерах управляющих систем.
Целью изобретения является повышение разрешающей способности преобразования кода в угол поворота вала сельсина за счет уменьшения шага дискретизации устанавливаемого угла.
Сущность способа заключается в следующем. В первую, вторую и третью обмотки синхронизации сельсина подают напряжения вида:
Ui Ui sin CD t,
U2 Uz1 sin at t.
11з из sin on,
причем первоначально Ui1 Um, Ua1 0 и Уз1 0, что соответствует условному нулевому угловому положению ротора сельсина. Затем амплитуду синусоидального напряжения во второй обмотке синхронизации U21 равномерно изменяют от 0 до Um. Это вызывает перемещение ротора сельсина от 0 до 60°.
Зависимость между углом поворота ротора сельсина амплитудой синусоидального напряжения во второй обмотке U2 при Ui1 Um и 1)з 0 определяется следующим образом.
Синхронизирующий момент сельсина может быть определен как
ч чэ
01
ел ел ю
MCHHx- a(Ui sln a+U2rsln( a-120°) + U3 sin( a + 120°)),
где a - угловое положение ротора сельсин- приемника;
Ui1, U21, Us - амплитуды синусоидальных напряжений, подаваемых соответственно в первую, вторую и третью обмотки синхронизации сельсина;
а - коэффициент пропорциональности.
Приравнивая правую часть этого выражения нулю и подставляя в него значения подаваемых на обмотки возбуждения напряжений, находим зависимость между углом а и амплитудой напряжения U21 при условии, что U11 Dm, а Уз1 0:
Umsin (a -120°)-О
а - arctg-, ., 2 Um-u4
В интервале изменения данная зависимость близка висимости
а
UL
Um
60°
и а почти равномерно изменяется от 0 до 60°.
Зависимость а от Ui1, изменяющегося
1 || ..11
:0,
от Um до .0, при U21 Dm и Уз 0: Ui1 sin a + Um sln( a -120°)
а - arctg- - - .
Эта зависимость также близка к линейной зависимости
а )- 60°
vm
в диапазоне изменения Ui от Um до 0, а а при этом почти равномерно изменяется от 60 до 120°.
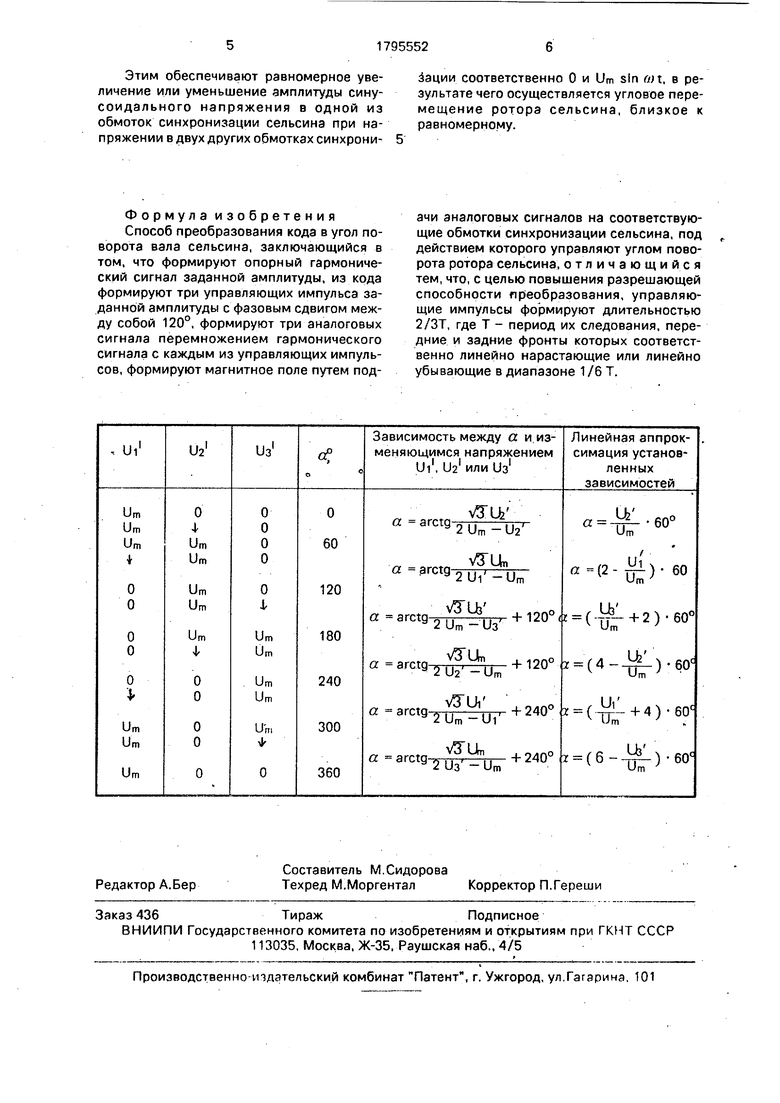
Аналогичным образом находятся остальные зависимости, приведенные в таблице.
Все эти зависимости близки к линейным, и,следовательно, поочередно изменяя амплитуду синусоидального напряжения в каждой из обмоток синхронизации сельсина от 0 до Um или от Um до 0 при напряжении в двух других обмотках синхронизации соответственно 0 и Um sin (i) t, получаем перемещение ротора сельсина в диапазоне от О до 360°, близкое к равномерному в отличие от прототипа, где шаг дискретизации равен 60°.
Таким образом, управляя амплитудами Ui1, U21, из1, можно установить заданный угол поворота вала сельсина в каждом секторе 60°, номер которого определяется экстремальными значениями совокупности напряжений Ui, U , из1
При подаче на соответствующие обмотки синхронизации сельсина напряжений: Ui Ui1 sin (УХ,
U2 U2 Sln ft)t,
Us Us sin wt
первоначально установим Ui1 Um, U21 0, Us 0, что соответствует условному нулевому угловому положению ротора сельсина. Изменение амплитуды синусоидального напряжения во второй обмотке синхронизации U2 от 0 до Um вызывает перемещение ротора сельсина от 0° до 60°, изменение амплитуды синусоидального напряжения Ui1 от Um до 0 при U21 Um и из1 0 вызывает
перемещение ротора сельсина в диапазоне
от 60° до 120°, изменение амплитуды синусоидального напряжения в третьей обмотке синхронизации Us от 0 до Um при Ui 0 и U2 Um вызывает перемещение ротора
сельсина от 120° до 180°; изменение Ш1 от Um до 0 при Ui1 0, Us Um вызывает перемещение ротора сельсина от 180° до 240°; изменение Ui от 0 до Um при U21 0 и Us1 Um вызывает перемещение ротора
сельсина от 240 до 300° и изменение Us от Um до 0 при Ui Um и U21 0 вызывает перемещение ротора сельсина от 300° до 360°. Выполнение указанных операций в обратной последовательности вызывает движение ротора сельсина в противоположном
направлении. Следует отметить, что зависимости между углом поворота а в каждом из секторов по 60° и амплитудой равномерно изменяемого от 0 до Um синусоидально о напряжения в одной из обмоток синхронизации близки к линейным, что обеспечивает почти равномерное движение ротора сельсина.
Предлагаемый способ может быть реализован, например, следующим образом.
Управление осуществляют при помощи трех реверсивных счетчиков, к выходу которых подключены три цифроаналоговые умножители ЦАУ, умножающие коды,
поступающие с выходов реверсивных счетчиков, на синусоидальное напряжение. С выходов ЦАУ сигналы подают на обмотки синхронизации сельсина. Первоначально на выходах первого, второго и третьего ре- версивных счетчиков устанавливают соответственно коды 1111, 0000 и 0000.
Затем устройство управления поочередно разрешает счет реверсивным счетчи- кам, начиная со второго, затем первому, третьему, снова второму и т.д., причем поочередно осуществляют прямой счет, от значения 0000 до 1111, и обратный счет от значения 1111 до 0000.
Этим обеспечивают равномерное увеличение или уменьшение амплитуды синусоидального напряжения в одной из обмоток синхронизации сельсина при напряжении в двух других обмотках синхрони
Зэции соответственно 0 и Um sin wt, в результате чего осуществляется угловое перемещение ротора сельсина, близкое к равномерному.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления приводом регулирующего органа ядерного реактора и устройство для его осуществления | 1990 |
|
SU1785043A1 |
| Устройство для автоматического выбора кадра в диапроекторе | 1991 |
|
SU1793421A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Способ определения коэффициента мощности | 1989 |
|
SU1679401A1 |
| Способ контроля разности частот двух синусоидальных сигналов | 1991 |
|
SU1774280A1 |
| Устройство для импульсно-фазового управления | 1988 |
|
SU1739449A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Датчик скорости вращения | 1978 |
|
SU777582A1 |
| Электрический преобразователь для весов с циферблатным указателем | 1982 |
|
SU1048329A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
Изобретение относится к области авто1- матики, телемеханики и вычислительной техники и может быть использовано для углового перемещения вала сельсина в имитаторах и тренажерах управляющих систем. Целью изобретения является повышение разрешающей способности способа преобразования кода в угол поворота вала сельсина за счет уменьшения шага дискретизации устанавливаемого угла. Поставленная цель достигается тем, что в способе, заключающемся в том, что формируют опорный гармонический сигнал заданной амплитуды, из кода формируют три управляющих импульса заданной амплитуды с фазо вым сдвигом 120°, формируют три анал0- говых сигнала перемножением опорного гармонического сигнала с каждым из управляющих импульсов, формируют магнитное поле путем подачи аналоговых сигналов на соответствующие обмотки синхронизации сельсина, под действием которого управляют углом поворота ротора сельсина, а управляющие импульсы формируют длительностью 2/ЗТ, где Т- период их следования, передние и задние фронты которых соответственно линейно нарастающие или линейно убывающие в диапазоне 1 /6 Т. 1 табл. ел
Формула изобретения Способ преобразования кода в угол поворота вала сельсина, заключающийся в том, что формируют опорный гармонический сигнал заданной амплитуды, из кода формируют три управляющих импульса заданной амплитуды с фазовым сдвигом между собой 120°, формируют три аналоговых сигнала перемножением гармонического сигнала с каждым из управляющих импульсов, формируют магнитное поле путем подачи аналоговых сигналов на соответствующие обмотки синхронизации сельсина, под действием которого управляют углом поворота ротора сельсина, отличающийся тем, что, с целью повышения разрешающей способности преобразования, управляющие импульсы формируют длительностью 2/ЗТ, где Т - период их следования, передние и задние фронты которых соответственно линейно нарастающие или линейно убывающие в диапазоне 1/6 Т.
| Высокоточные преобразователи угловых перемещений/Под ред | |||
| А.А.Ахметждно- ва, М.: Энергоатомиздат | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
| Патент США № 4430640, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
